

Soft material for soft actuators
- PMID: 28928384
- PMCID: PMC5605691
- DOI: 10.1038/s41467-017-00685-3
Soft material for soft actuators
Abstract
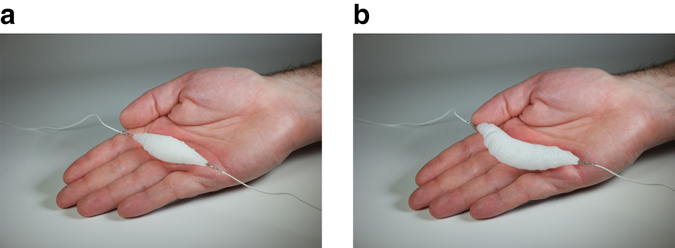
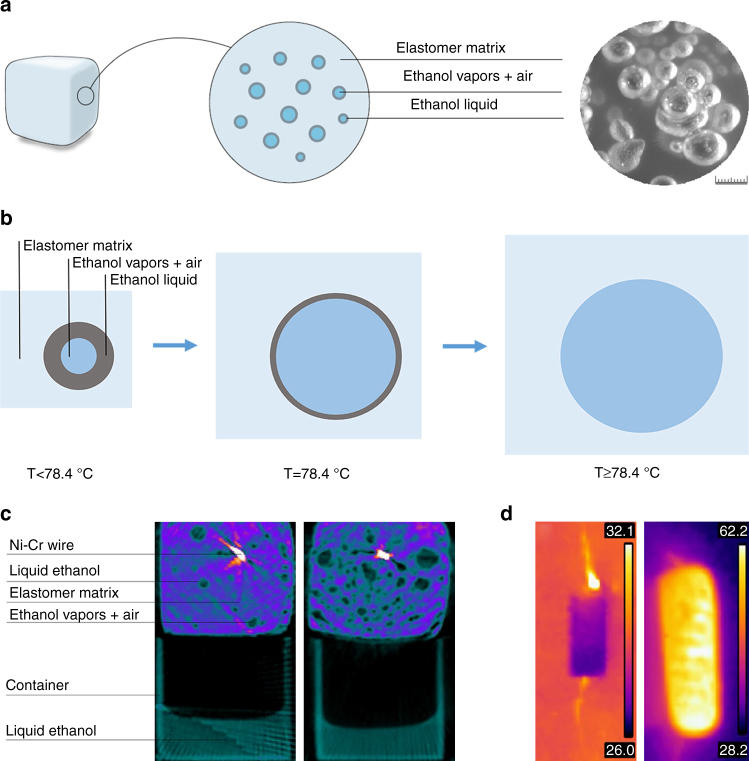
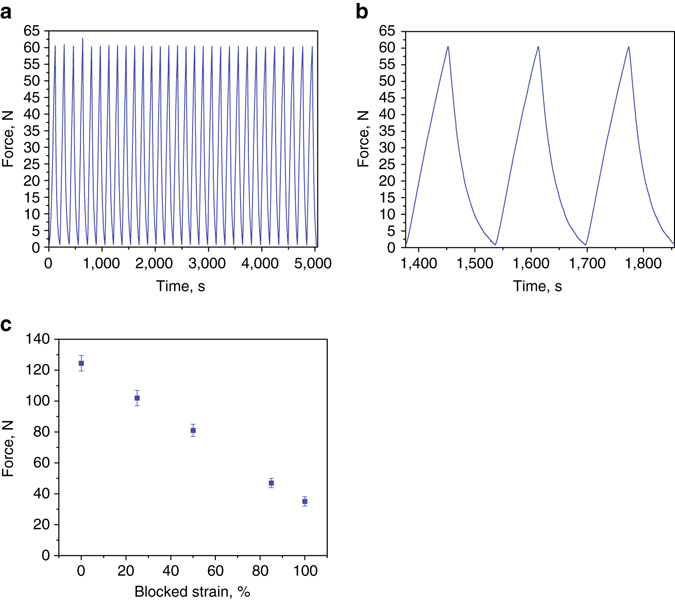
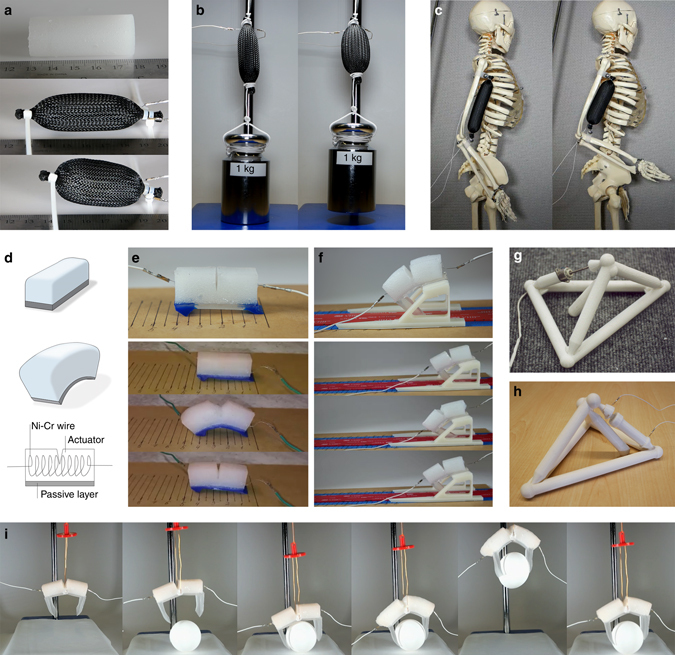
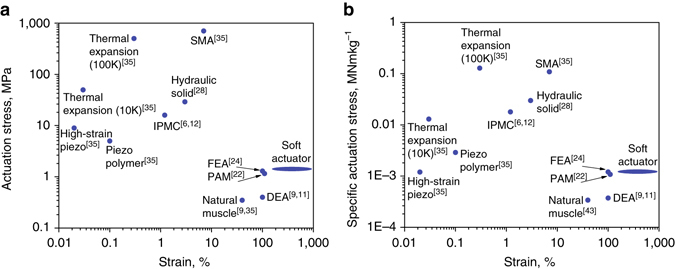
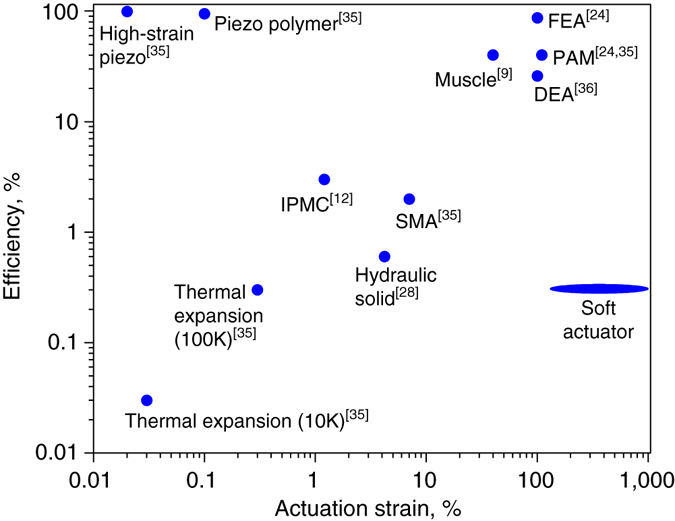
Inspired by natural muscle, a key challenge in soft robotics is to develop self-contained electrically driven soft actuators with high strain density. Various characteristics of existing technologies, such as the high voltages required to trigger electroactive polymers ( > 1KV), low strain ( < 10%) of shape memory alloys and the need for external compressors and pressure-regulating components for hydraulic or pneumatic fluidicelastomer actuators, limit their practicality for untethered applications. Here we show a single self-contained soft robust composite material that combines the elastic properties of a polymeric matrix and the extreme volume change accompanying liquid-vapor transition. The material combines a high strain (up to 900%) and correspondingly high stress (up to 1.3 MPa) with low density (0.84 g cm-3). Along with its extremely low cost (about 3 cent per gram), simplicity of fabrication and environment-friendliness, these properties could enable new kinds of electrically driven entirely soft robots.The development of self-contained electrically driven soft actuators with high strain density is difficult. Here the authors show a single self-contained soft robust composite material that combines the elastic properties of a polymeric matrix and the extreme volume change accompanying liquid vapour transition.
Conflict of interest statement
The authors declare no competing financial interests.
Figures
References
-
- Trivedi D, Rahn CD, Kier WM, Walker ID. Soft robotics: biological inspiration, state of the art, and future research. Appl. Bionics Biomech. 2008;5:99–117. doi: 10.1155/2008/520417. - DOI
LinkOut - more resources
Full Text Sources
Other Literature Sources
Molecular Biology Databases
