

Why pens have rubbery grips
- PMID: 28973874
- PMCID: PMC5642691
- DOI: 10.1073/pnas.1706233114
Why pens have rubbery grips
Abstract
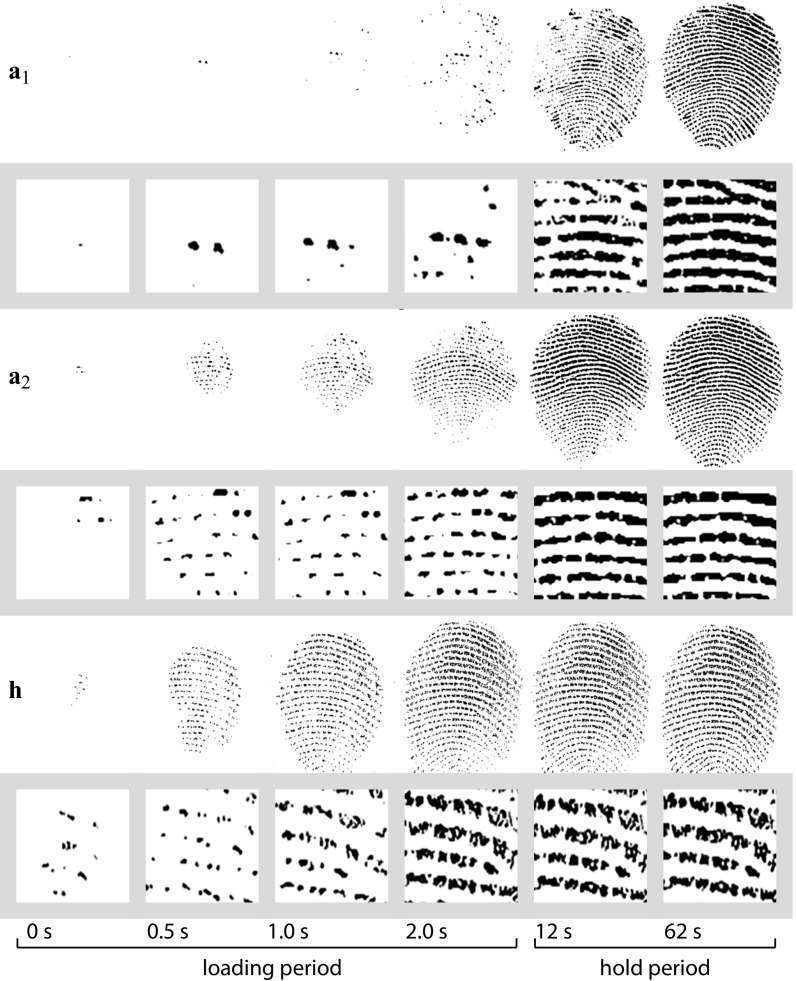
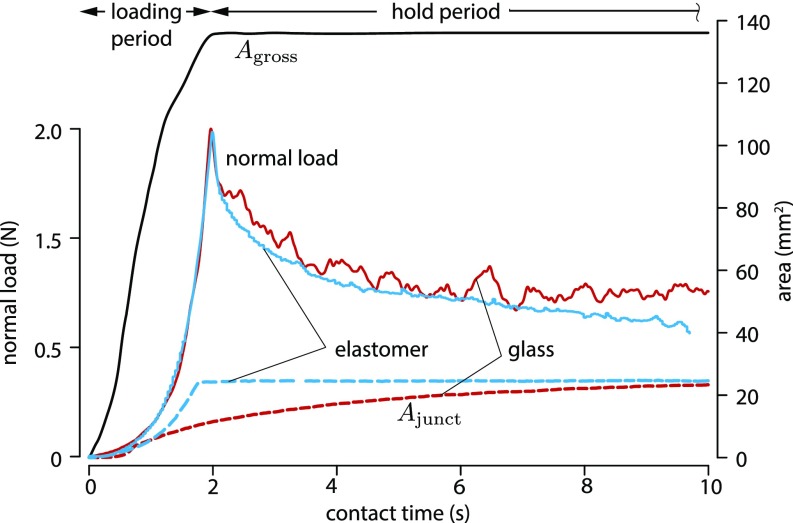
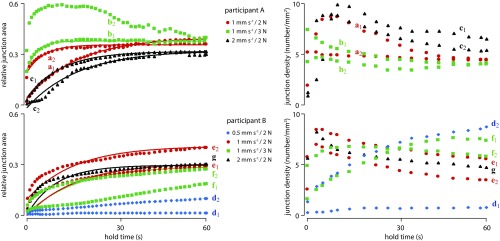
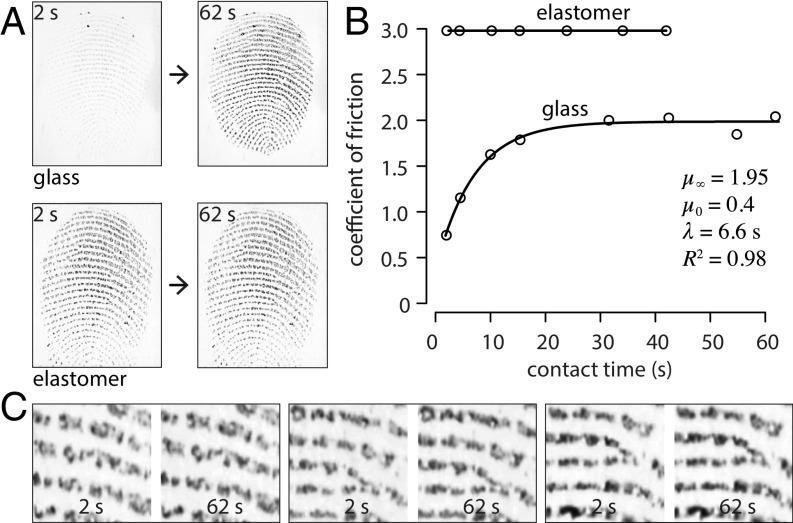
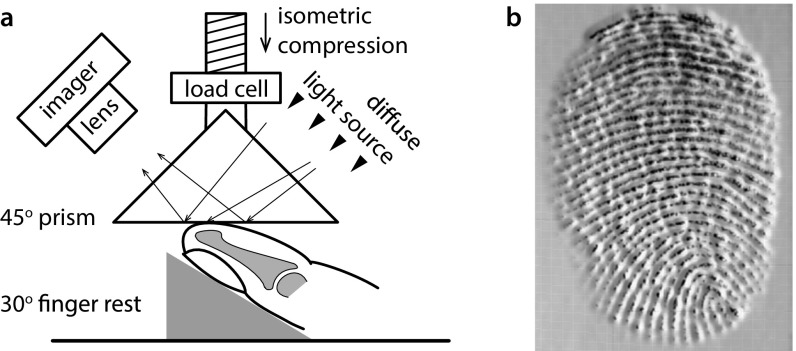
The process by which human fingers gives rise to stable contacts with smooth, hard objects is surprisingly slow. Using high-resolution imaging, we found that, when pressed against glass, the actual contact made by finger pad ridges evolved over time following a first-order kinetics relationship. This evolution was the result of a two-stage coalescence process of microscopic junctions made between the keratin of the stratum corneum of the skin and the glass surface. This process was driven by the secretion of moisture from the sweat glands, since increased hydration in stratum corneum causes it to become softer. Saturation was typically reached within 20 s of loading the contact, regardless of the initial moisture state of the finger and of the normal force applied. Hence, the gross contact area, frequently used as a benchmark quantity in grip and perceptual studies, is a poor reflection of the actual contact mechanics that take place between human fingers and smooth, impermeable surfaces. In contrast, the formation of a steady-state contact area is almost instantaneous if the counter surface is soft relative to keratin in a dry state. It is for this reason that elastomers are commonly used to coat grip surfaces.
Keywords: biotribology; finger friction; fingerprints; true contact area kinetics.
Conflict of interest statement
The authors declare no conflict of interest.
Figures
References
-
- Dyson J, Hirst W. The true contact area between solids. Proc Phys Soc B. 1954;67:309–312.
-
- Pasumarty SM, Johnson SA, Watson SA, Adams MJ. Friction of the human finger pad: Influence of moisture, occlusion and velocity. Tribol Lett. 2011;44:117–137.
-
- Vezzoli E, et al. Physical and perceptual independence of ultrasonic vibration and electrovibration for friction modulation. IEEE Trans Haptics. 2015;8:235–239. - PubMed
-
- Nakatani M, Howe RD, Tachi S. Surface texture can bias tactile form perception. Exp Brain Res. 2011;208:151–156. - PubMed
Publication types
MeSH terms
Substances
LinkOut - more resources
Full Text Sources
Other Literature Sources
