

Comparison of six electromyography acquisition setups on hand movement classification tasks
- PMID: 29023548
- PMCID: PMC5638457
- DOI: 10.1371/journal.pone.0186132
Comparison of six electromyography acquisition setups on hand movement classification tasks
Abstract
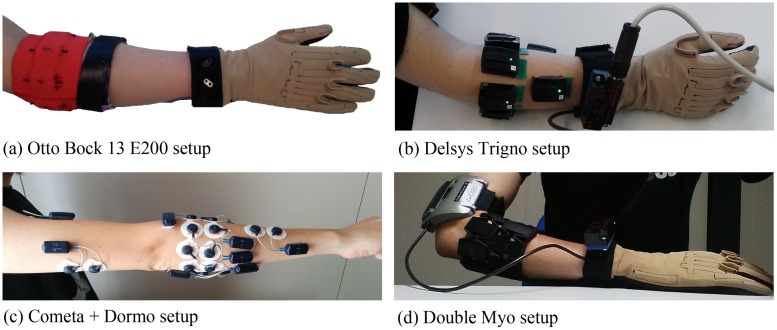
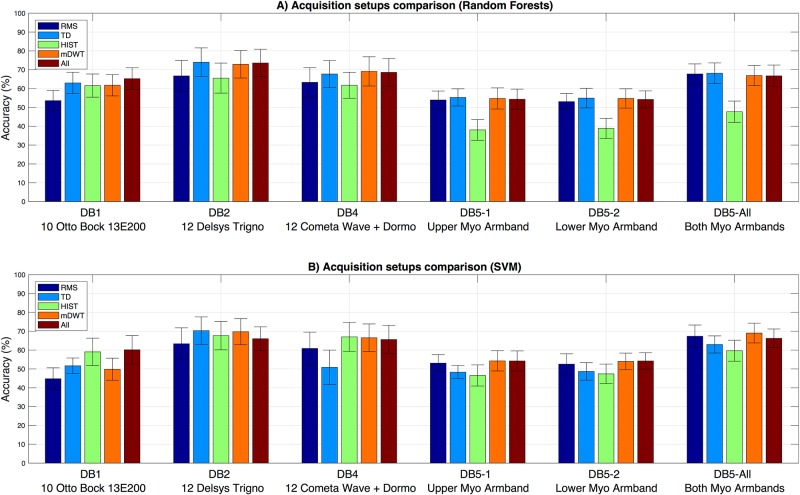
Hand prostheses controlled by surface electromyography are promising due to the non-invasive approach and the control capabilities offered by machine learning. Nevertheless, dexterous prostheses are still scarcely spread due to control difficulties, low robustness and often prohibitive costs. Several sEMG acquisition setups are now available, ranging in terms of costs between a few hundred and several thousand dollars. The objective of this paper is the relative comparison of six acquisition setups on an identical hand movement classification task, in order to help the researchers to choose the proper acquisition setup for their requirements. The acquisition setups are based on four different sEMG electrodes (including Otto Bock, Delsys Trigno, Cometa Wave + Dormo ECG and two Thalmic Myo armbands) and they were used to record more than 50 hand movements from intact subjects with a standardized acquisition protocol. The relative performance of the six sEMG acquisition setups is compared on 41 identical hand movements with a standardized feature extraction and data analysis pipeline aimed at performing hand movement classification. Comparable classification results are obtained with three acquisition setups including the Delsys Trigno, the Cometa Wave and the affordable setup composed of two Myo armbands. The results suggest that practical sEMG tests can be performed even when costs are relevant (e.g. in small laboratories, developing countries or use by children). All the presented datasets can be used for offline tests and their quality can easily be compared as the data sets are publicly available.
Conflict of interest statement
Figures
References
-
- Finley FR, Wirta RW. Myocoder studies of multiple myopotential response. Archives of Physical Medicine and Rehabilitation. 1967;48(11):598–601. - PubMed
-
- Farina D, Member S, Jiang N, Rehbaum H, Member S. The Extraction of Neural Information from the Surface EMG for the Control of Upper-Limb Prostheses: Emerging Avenues and Challenges. 2014;22(4):797–809. - PubMed
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
Other Literature Sources
