

Interacting Learning Processes during Skill Acquisition: Learning to control with gradually changing system dynamics
- PMID: 29038562
- PMCID: PMC5643438
- DOI: 10.1038/s41598-017-13510-0
Interacting Learning Processes during Skill Acquisition: Learning to control with gradually changing system dynamics
Abstract
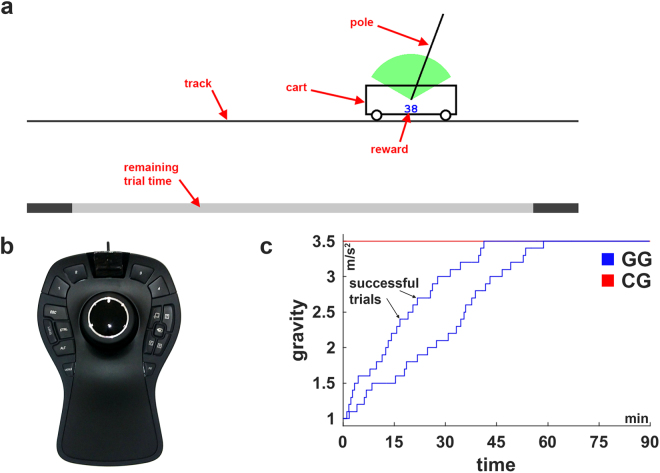
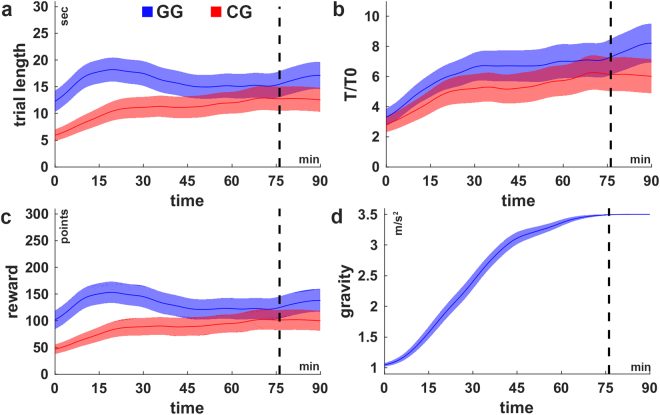
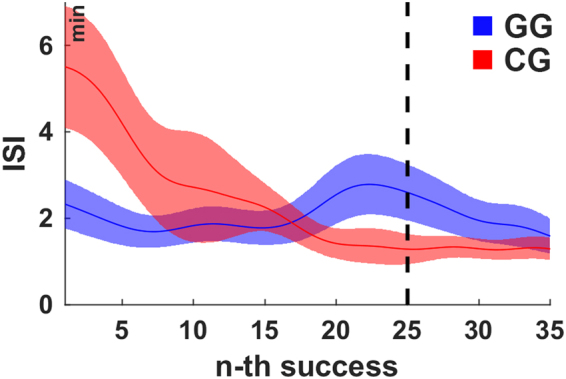
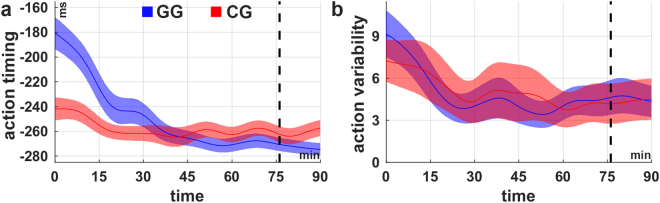
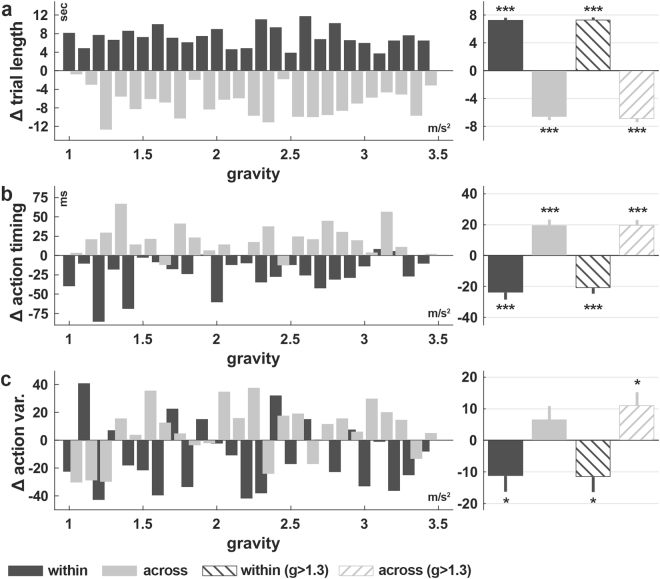
There is increasing evidence that sensorimotor learning under real-life conditions relies on a composition of several learning processes. Nevertheless, most studies examine learning behaviour in relation to one specific learning mechanism. In this study, we examined the interaction between reward-based skill acquisition and motor adaptation to changes of object dynamics. Thirty healthy subjects, split into two groups, acquired the skill of balancing a pole on a cart in virtual reality. In one group, we gradually increased the gravity, making the task easier in the beginning and more difficult towards the end. In the second group, subjects had to acquire the skill on the maximum, most difficult gravity level. We hypothesized that the gradual increase in gravity during skill acquisition supports learning despite the necessary adjustments to changes in cart-pole dynamics. We found that the gradual group benefits from the slow increment, although overall improvement was interrupted by the changes in gravity and resulting system dynamics, which caused short-term degradations in performance and timing of actions. In conclusion, our results deliver evidence for an interaction of reward-based skill acquisition and motor adaptation processes, which indicates the importance of both processes for the development of optimized skill acquisition schedules.
Conflict of interest statement
The authors declare that they have no competing interests.
Figures
References
-
- Prablanc C, Tzavaras A, Jeannerod M. Adaptation of hand tracking to rotated visual coordinates. Perception & Psychophysics. 1975;17:325–328. doi: 10.3758/BF03203218. - DOI
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
Other Literature Sources
