

Toward a framework for levels of robot autonomy in human-robot interaction
- PMID: 29082107
- PMCID: PMC5656240
- DOI: 10.5898/JHRI.3.2.Beer
Toward a framework for levels of robot autonomy in human-robot interaction
Abstract
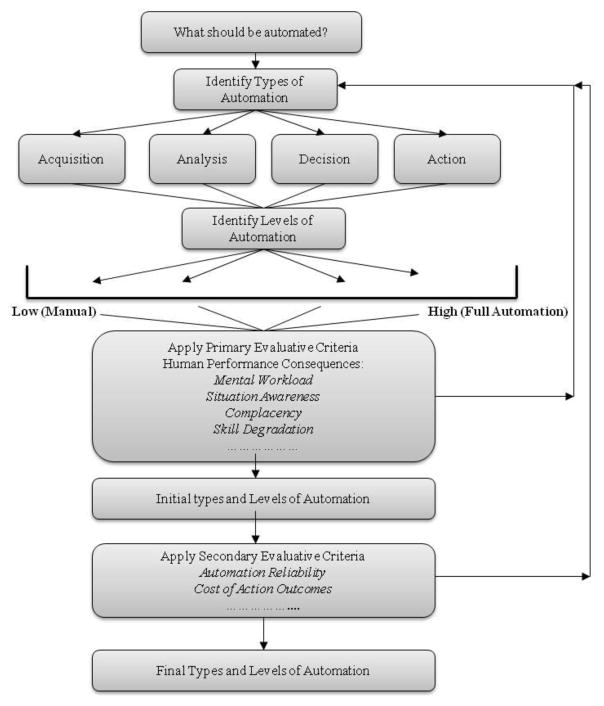
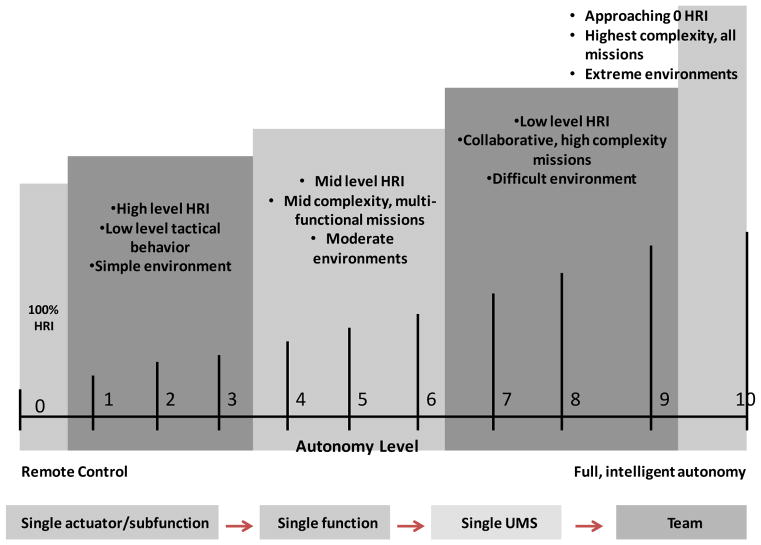
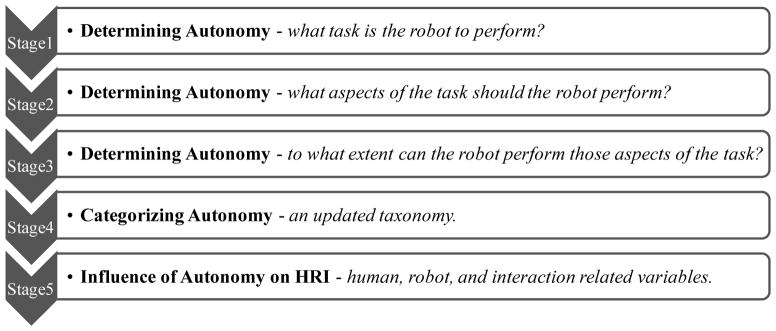
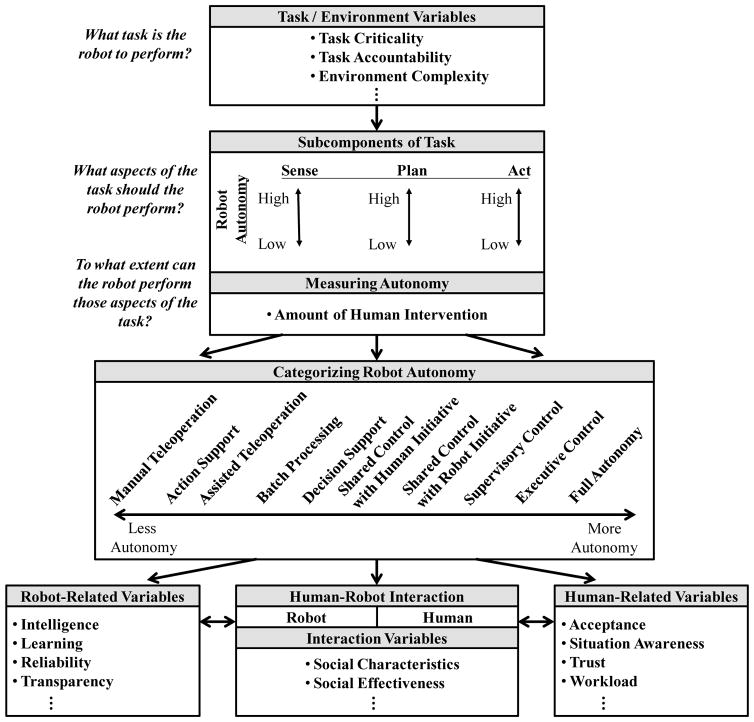
A critical construct related to human-robot interaction (HRI) is autonomy, which varies widely across robot platforms. Levels of robot autonomy (LORA), ranging from teleoperation to fully autonomous systems, influence the way in which humans and robots may interact with one another. Thus, there is a need to understand HRI by identifying variables that influence - and are influenced by - robot autonomy. Our overarching goal is to develop a framework for levels of robot autonomy in HRI. To reach this goal, the framework draws links between HRI and human-automation interaction, a field with a long history of studying and understanding human-related variables. The construct of autonomy is reviewed and redefined within the context of HRI. Additionally, the framework proposes a process for determining a robot's autonomy level, by categorizing autonomy along a 10-point taxonomy. The framework is intended to be treated as guidelines to determine autonomy, categorize the LORA along a qualitative taxonomy, and consider which HRI variables (e.g., acceptance, situation awareness, reliability) may be influenced by the LORA.
Keywords: Human-robot interaction; automation; autonomy; framework; levels of robot autonomy.
Figures
References
-
- Alami R, Chatila R, Fleury S, Ghallab M, Ingrand F. An architecture for autonomy. International Journal of Robotics Research. 1998;17(4):315–337.
-
- Arkin RC. Behavior Based Robotics. Boston: MIT Press; 1998.
-
- Baker M, Yanco HA. Autonomy mode suggestions for improving human-robot interaction. Proceedings of the IEEE Conference on Systems, Man, and Cybernetics. 2004;3:2948–2953.
-
- Bekey GA. Autonomous Robots: From Biological Inspiration to Implementation and Control. Cambridge, MA: The MIT Press; 2005.
-
- Breazeal C. Emotion and Sociable Humanoid Robots. International Journal of Human Computer Interaction. 2003;59:119–115.
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources