

Standing on slopes - how current microprocessor-controlled prosthetic feet support transtibial and transfemoral amputees in an everyday task
- PMID: 29145876
- PMCID: PMC5691831
- DOI: 10.1186/s12984-017-0322-2
Standing on slopes - how current microprocessor-controlled prosthetic feet support transtibial and transfemoral amputees in an everyday task
Abstract
Background: Conventional prosthetic feet like energy storage and return feet provide only a limited range of ankle motion compared to human ones. In order to overcome the poor rotational adaptability, prosthetic manufacturers developed different prosthetic feet with an additional rotational joint and implemented active control in different states. It was the aim of the study to investigate to what extent these commercially available microprocessor-controlled prosthetic feet support a natural posture while standing on inclines and which concept is most beneficial for lower limb amputees.
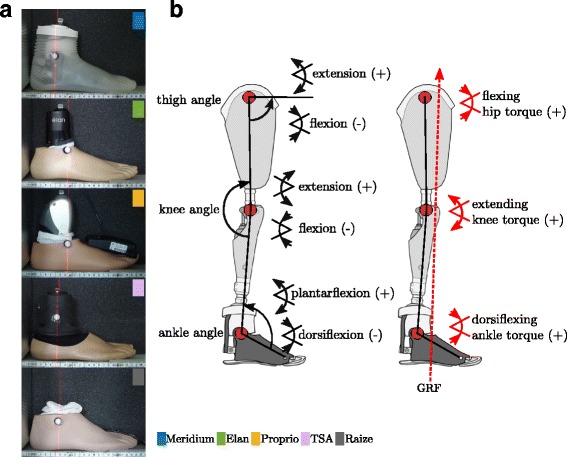
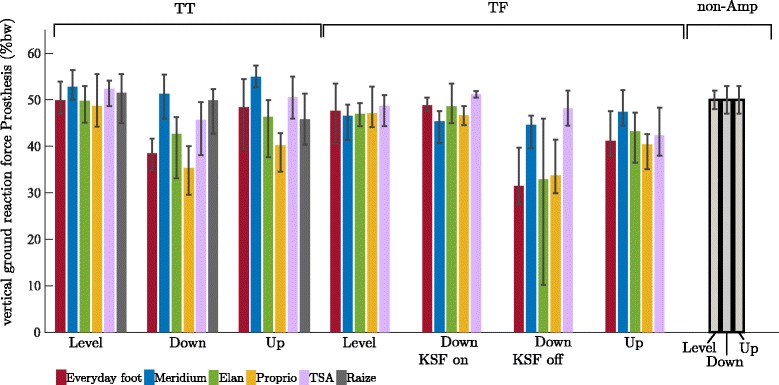
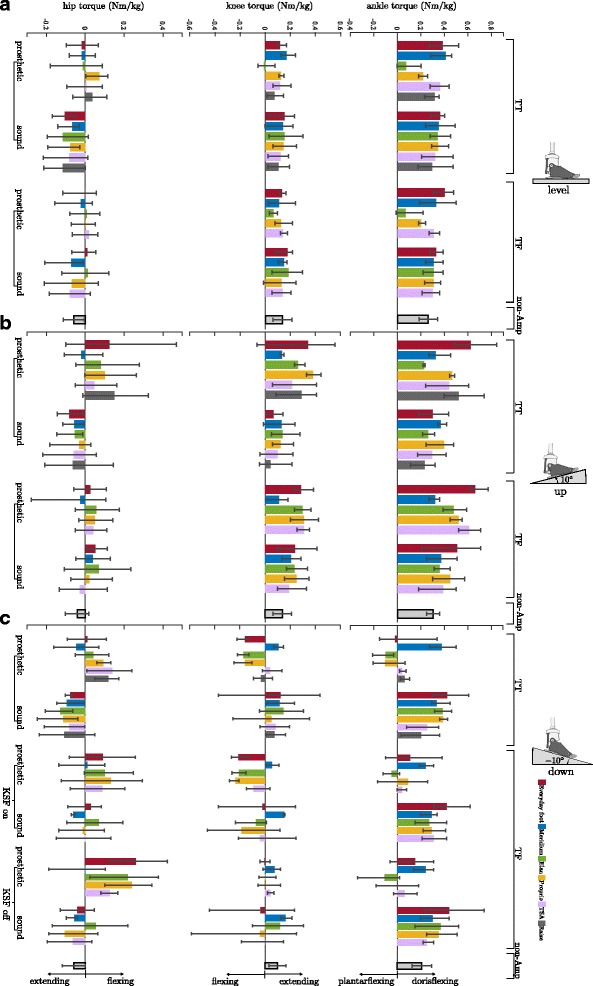
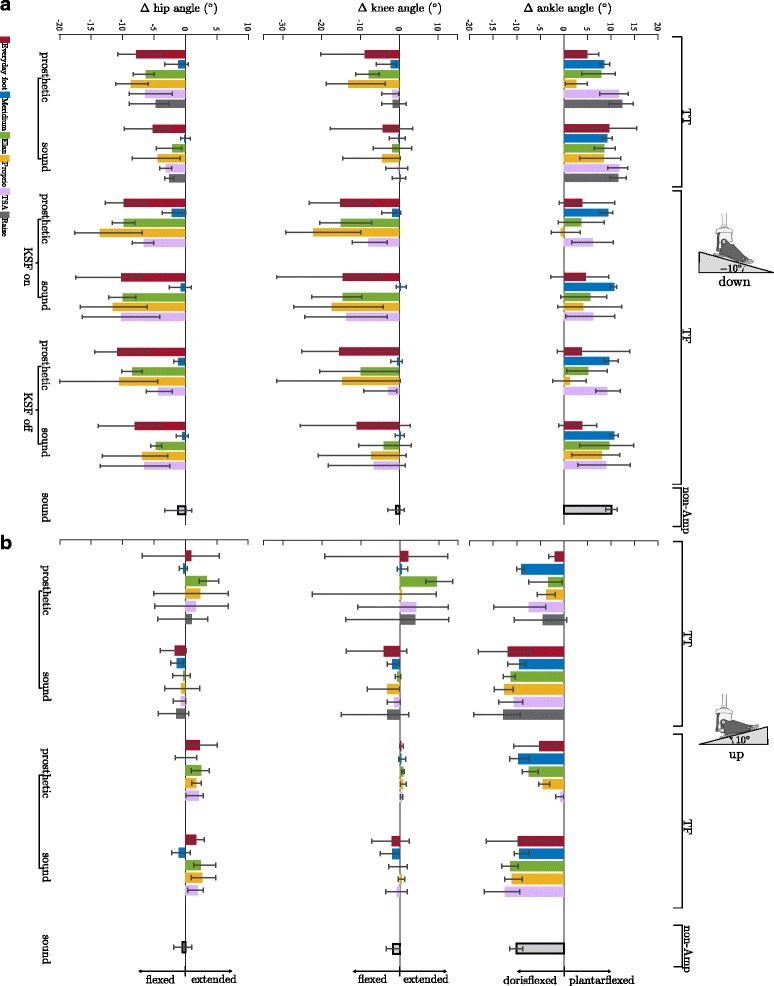
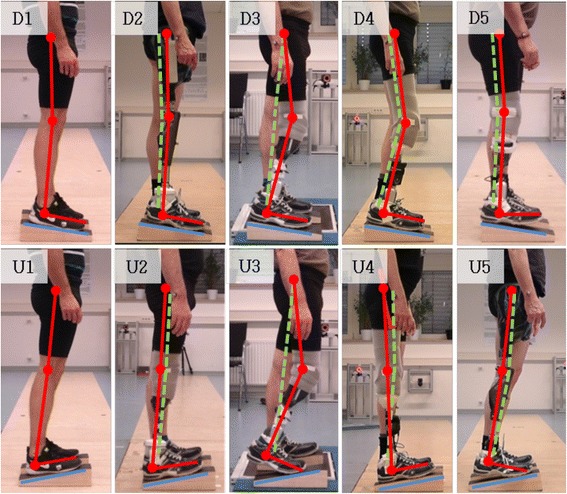
Methods: Four unilateral transtibial and four unilateral transfemoral amputees participated in the study. Each of the subjects wore five different microprocessor-controlled prosthetic feet in addition to their everyday feet. The subjects were asked to stand on slopes of different inclinations (level ground, upward slope of 10°, and downward slope of -10°). Vertical ground reaction forces, joint torques and joint angles in the sagittal plane were measured for both legs separately for the different situations and compared to a non-amputee reference group.
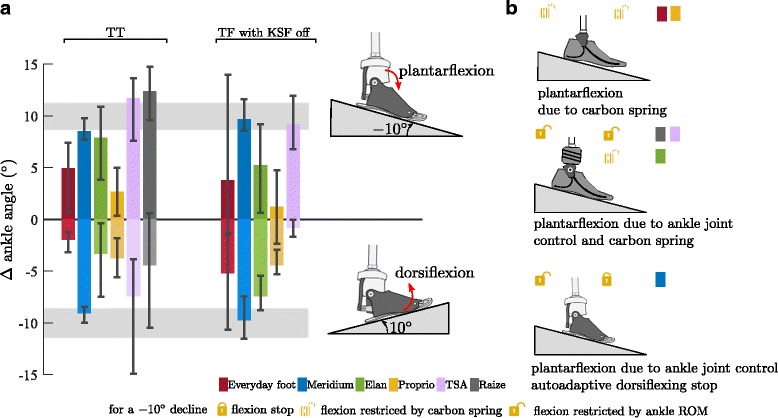
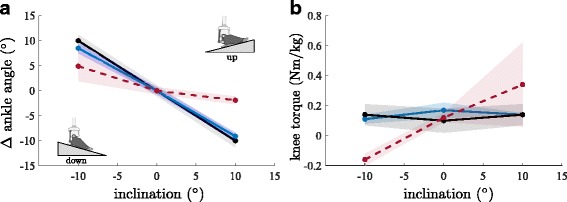
Results: Differences in the biomechanical parameters were observed between the different prosthetic feet and compared to the reference group for the investigated situations. They were most prominent while standing on a downward slope. For example, on the prosthetic side, the vertical ground reaction force is reduced by about 20%, and the torque about the knee acts to flex the joint for feet that are not capable of a full adaptation to the downward slope. In contrast, fully adaptable feet with an auto-adaptive dorsiflexion stop show no changes in vertical ground reaction forces and knee extending torques.
Conclusions: A prosthetic foot that provides both, an auto-adaptive dorsiflexion stop and a sufficient range of motion for fully adapting to inclinations appears to be the key element in the prosthetic fitting for standing on inclinations in lower limb amputees. In such situations, this prosthetic concept appears superior to both, conventional feet with passive structures as well as feet that solely provide a sufficient range of motion. The results also indicate that both, transfemoral and transtibial amputees benefit from such a foot.
Keywords: Amputee; Biomechanics; Microprocessor-controlled prosthetic feet; Prosthetic; Prosthetic knee; Standing; Strategies in standing.
Conflict of interest statement
Ethics approval and consent to participate
The study was conducted in accordance with the Declaration of Helsinki and approved by the ethic committee of the University Medical Center Göttingen (UMG). Prior to the participation each subject got a detailed explanation about the study, and a written informed consent was obtained from all subjects.
Competing interests
All authors are fulltime employees of Otto Bock. The feet investigated in the study are from different prosthetic manufacturers (Otto Bock, Fillauer, Össur, Blachford).
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Figures
References
MeSH terms
LinkOut - more resources
Full Text Sources
Other Literature Sources
Medical
