

Estimating Stair Running Performance Using Inertial Sensors
- PMID: 29149063
- PMCID: PMC5713493
- DOI: 10.3390/s17112647
Estimating Stair Running Performance Using Inertial Sensors
Abstract
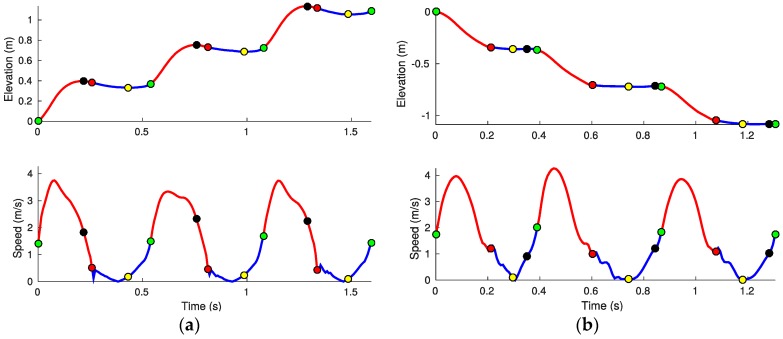
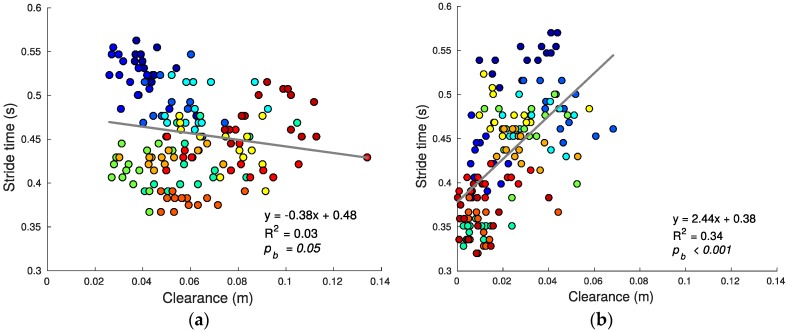
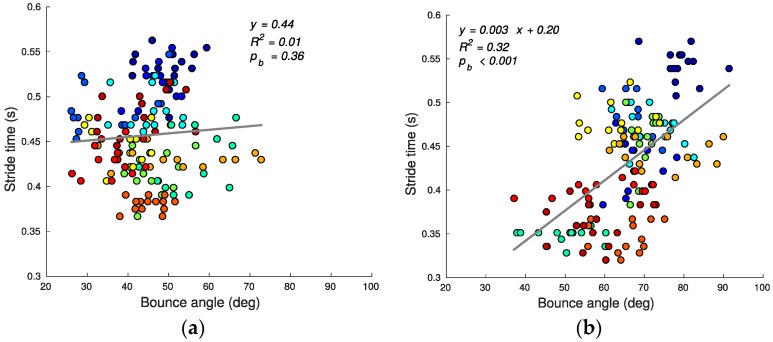
Stair running, both ascending and descending, is a challenging aerobic exercise that many athletes, recreational runners, and soldiers perform during training. Studying biomechanics of stair running over multiple steps has been limited by the practical challenges presented while using optical-based motion tracking systems. We propose using foot-mounted inertial measurement units (IMUs) as a solution as they enable unrestricted motion capture in any environment and without need for external references. In particular, this paper presents methods for estimating foot velocity and trajectory during stair running using foot-mounted IMUs. Computational methods leverage the stationary periods occurring during the stance phase and known stair geometry to estimate foot orientation and trajectory, ultimately used to calculate stride metrics. These calculations, applied to human participant stair running data, reveal performance trends through timing, trajectory, energy, and force stride metrics. We present the results of our analysis of experimental data collected on eleven subjects. Overall, we determine that for either ascending or descending, the stance time is the strongest predictor of speed as shown by its high correlation with stride time.
Keywords: human performance; inertial measurement units; motion tracking; stair running; wearable sensors.
Conflict of interest statement
The authors declare no conflict of interest.
Figures









References
-
- Harris G.R., Stone M.H., O’Bryant H.S., Johnson R.L. Short-term performance effects of high power, high force, or combined weight-training methods. J. Strength Cond. Res. 2000;14:14–20.
MeSH terms
LinkOut - more resources
Full Text Sources
Other Literature Sources
