

Optimal design and control of an electromechanical transfemoral prosthesis with energy regeneration
- PMID: 29149213
- PMCID: PMC5693418
- DOI: 10.1371/journal.pone.0188266
Optimal design and control of an electromechanical transfemoral prosthesis with energy regeneration
Abstract
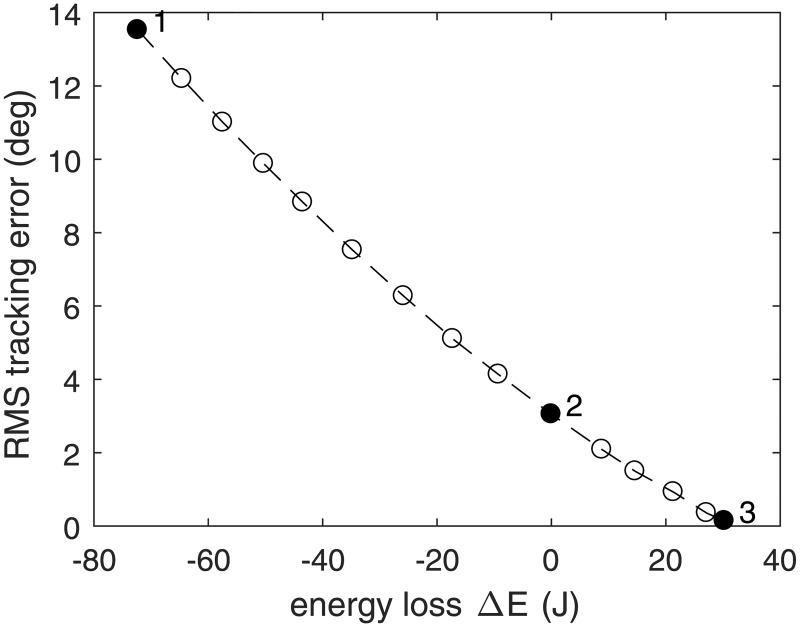
In this paper, we present the design of an electromechanical above-knee active prosthesis with energy storage and regeneration. The system consists of geared knee and ankle motors, parallel springs for each motor, an ultracapacitor, and controllable four-quadrant power converters. The goal is to maximize the performance of the system by finding optimal controls and design parameters. A model of the system dynamics was developed, and used to solve a combined trajectory and design optimization problem. The objectives of the optimization were to minimize tracking error relative to human joint motions, as well as energy use. The optimization problem was solved by the method of direct collocation, based on joint torque and joint angle data from ten subjects walking at three speeds. After optimization of controls and design parameters, the simulated system could operate at zero energy cost while still closely emulating able-bodied gait. This was achieved by controlled energy transfer between knee and ankle, and by controlled storage and release of energy throughout the gait cycle. Optimal gear ratios and spring parameters were similar across subjects and walking speeds.
Conflict of interest statement
Figures


References
-
- Huang C, Jackson J, Moore N, Fine P, Kuhlemeier K, Traugh G, et al. Amputation: energy cost of ambulation. Archives of physical medicine and rehabilitation. 1979;60(1):18–24. - PubMed
-
- Waters R, Perry J, Antonelli D, Hislop H. Energy cost of walking of amputees: the influence of level of amputation. J Bone Joint Surg Am. 1976;58(1):42–46. doi: 10.2106/00004623-197658010-00007 - DOI - PubMed
-
- Gitter A, Czerniecki J, Weaver K. A reassessment of center-of-mass dynamics as a determinate of the metabolic inefficiency of above-knee amputee ambulation. American journal of physical medicine & rehabilitation. 1995;74(5):337–338. - PubMed
-
- Graham LE, Datta D, Heller B, Howitt J, Pros D. A comparative study of conventional and energy-storing prosthetic feet in high-functioning transfemoral amputees. Archives of physical medicine and rehabilitation. 2007;88(6):801–806. doi: 10.1016/j.apmr.2007.02.028 - DOI - PubMed
-
- Gailey R. Review of secondary physical conditions associated with lower-limb amputation and long-term prosthesis use. Journal of rehabilitation research and development. 2008;45(1):15 doi: 10.1682/JRRD.2006.11.0147 - DOI - PubMed
MeSH terms
LinkOut - more resources
Full Text Sources
Other Literature Sources
Medical
