

Continuum Reconfigurable Parallel Robots for Surgery: Shape Sensing and State Estimation with Uncertainty
- PMID: 29159291
- PMCID: PMC5693261
- DOI: 10.1109/LRA.2017.2678606
Continuum Reconfigurable Parallel Robots for Surgery: Shape Sensing and State Estimation with Uncertainty
Abstract
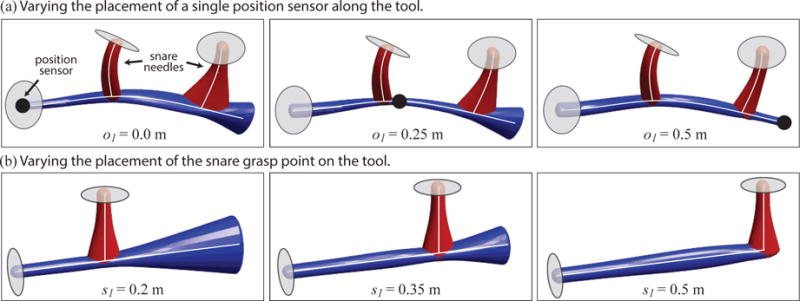
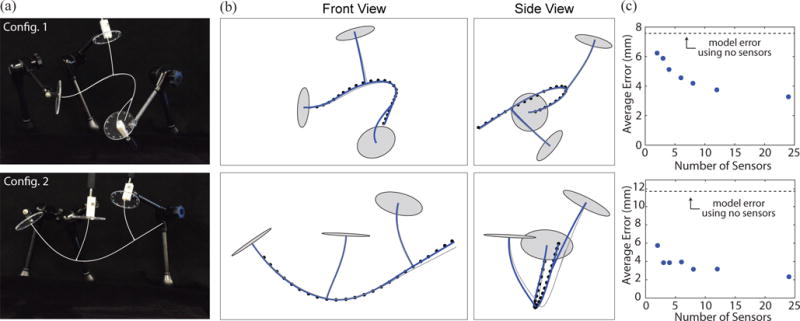
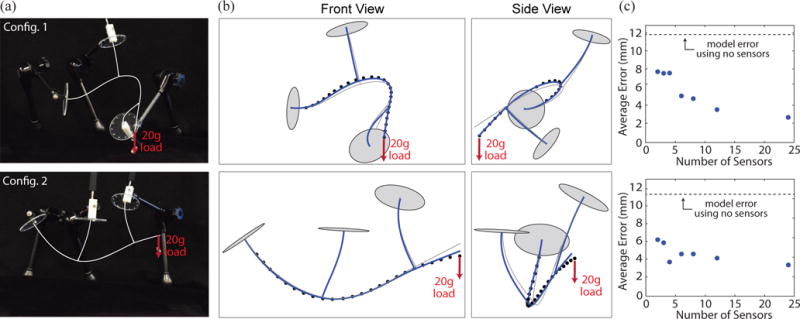
This paper examines shape sensing for a new class of surgical robot that consists of parallel flexible structures that can be reconfigured inside the human body. Known as CRISP robots, these devices provide access to the human body through needle-sized entry points, yet can be configured into truss-like structures capable of dexterous movement and large force application. They can also be reconfigured as needed during a surgical procedure. Since CRISP robots are elastic, they will deform when subjected to external forces or other perturbations. In this paper, we explore how to combine sensor information with mechanics-based models for CRISP robots to estimate their shapes under applied loads. The end result is a shape sensing framework for CRISP robots that will enable future research on control under applied loads, autonomous motion, force sensing, and other robot behaviors.
Keywords: Flexible Robots; Surgical Robotics: Laparoscopy; Surgical Robotics: Steerable Catheters/Needles.
Figures




Similar articles
-
Unified Shape and External Load State Estimation for Continuum Robots.IEEE Trans Robot. 2024;40:1813-1827. doi: 10.1109/tro.2024.3360950. Epub 2024 Feb 1. IEEE Trans Robot. 2024. PMID: 39464302 Free PMC article.
-
Towards FBG-Based Shape Sensing for Micro-scale and Meso-Scale Continuum Robots with Large Deflection.IEEE Robot Autom Lett. 2020 Apr;5(2):1712-1719. doi: 10.1109/lra.2020.2969934. Epub 2020 Jan 28. IEEE Robot Autom Lett. 2020. PMID: 32258410 Free PMC article.
-
Laser-Profiled Continuum Robot with Integrated Tension Sensing for Simultaneous Shape and Tip Force Estimation.Soft Robot. 2020 Aug;7(4):421-443. doi: 10.1089/soro.2019.0051. Epub 2020 Feb 20. Soft Robot. 2020. PMID: 32077810
-
Sensing of Continuum Robots: A Review.Sensors (Basel). 2024 Feb 18;24(4):1311. doi: 10.3390/s24041311. Sensors (Basel). 2024. PMID: 38400468 Free PMC article. Review.
-
Designing Expandable-Structure Robots for Human-Robot Interaction.Front Robot AI. 2022 Apr 11;9:719639. doi: 10.3389/frobt.2022.719639. eCollection 2022. Front Robot AI. 2022. PMID: 35480087 Free PMC article. Review.
Cited by
-
Toward Asymptotically-Optimal Inspection Planning via Efficient Near-Optimal Graph Search.Robot Sci Syst. 2019 Jun;2019:10.15607/rss.2019.xv.057. doi: 10.15607/rss.2019.xv.057. Robot Sci Syst. 2019. PMID: 32318619 Free PMC article.
-
Improved Continuum Joint Configuration Estimation Using a Linear Combination of Length Measurements and Optimization of Sensor Placement.Front Robot AI. 2021 Apr 1;8:637301. doi: 10.3389/frobt.2021.637301. eCollection 2021. Front Robot AI. 2021. PMID: 33869295 Free PMC article.
-
Unified Shape and External Load State Estimation for Continuum Robots.IEEE Trans Robot. 2024;40:1813-1827. doi: 10.1109/tro.2024.3360950. Epub 2024 Feb 1. IEEE Trans Robot. 2024. PMID: 39464302 Free PMC article.
References
-
- Mahoney AW, Anderson PL, Swaney PJ, Webster RJ. Reconfigurable parallel continuum robots for incisionless surgery. 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2016 Oct;:4330–4336.
-
- Webster RJ, III, Jones BA. Design and kinematic modeling of constant curvature continuum robots: A review. Int J Robot Res. 2010;29(13):1661–1683.
-
- Burgner-Kahrs J, Rucker DC, Choset H. Continuum robots for medical applications: A survey. IEEE Transactions on Robotics. 2015;31(6):1261–1280.
-
- Merlet J-PP. Parallel Robots. Norwell, MA, USA: Kluwer Academic Publishers; 2000.
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources