

A Robotic Flexible Drill and Its Navigation System for Total Hip Arthroplasty
- PMID: 29168018
- PMCID: PMC5809567
- DOI: 10.1007/s10439-017-1959-5
A Robotic Flexible Drill and Its Navigation System for Total Hip Arthroplasty
Abstract
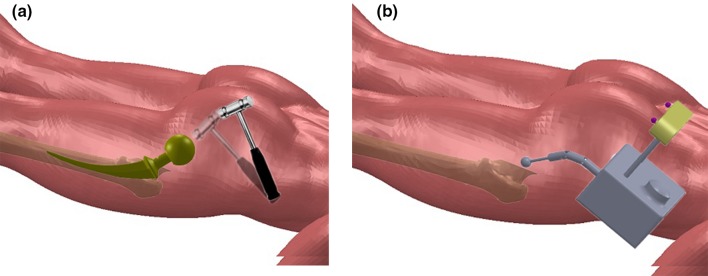
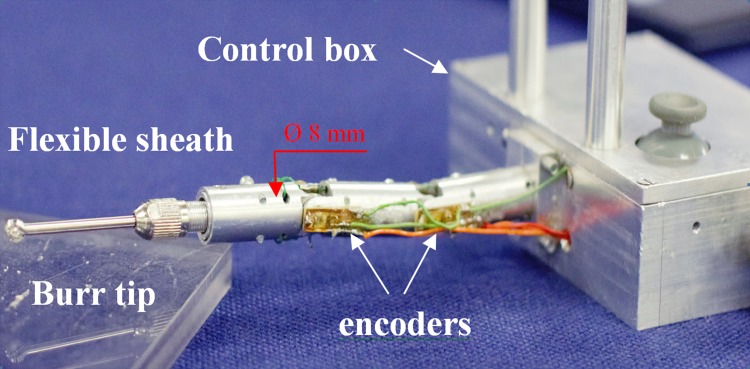
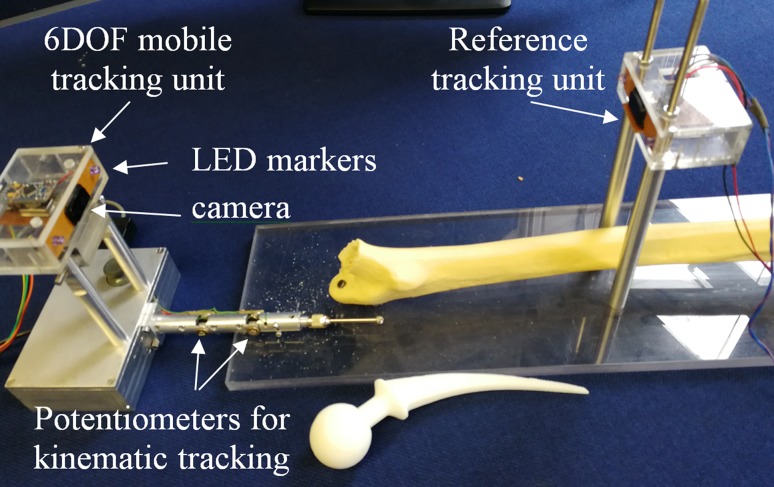
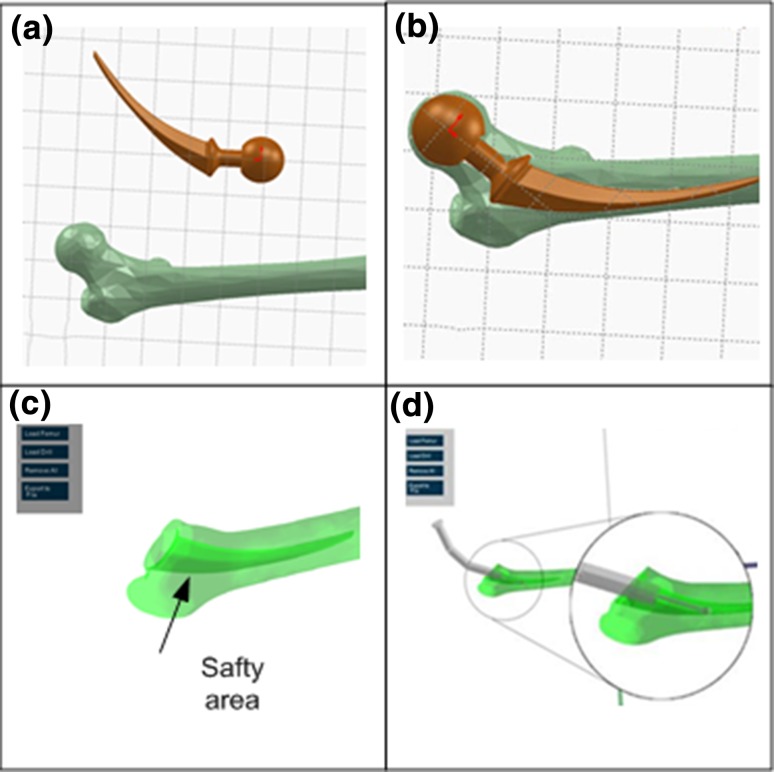
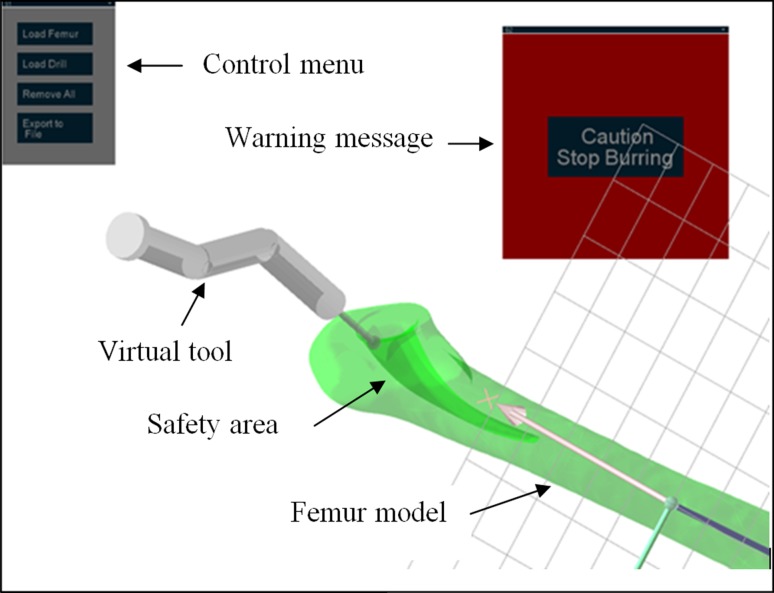
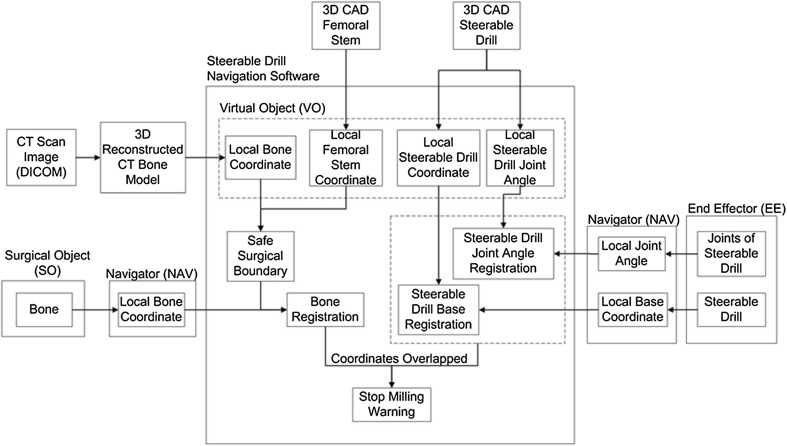
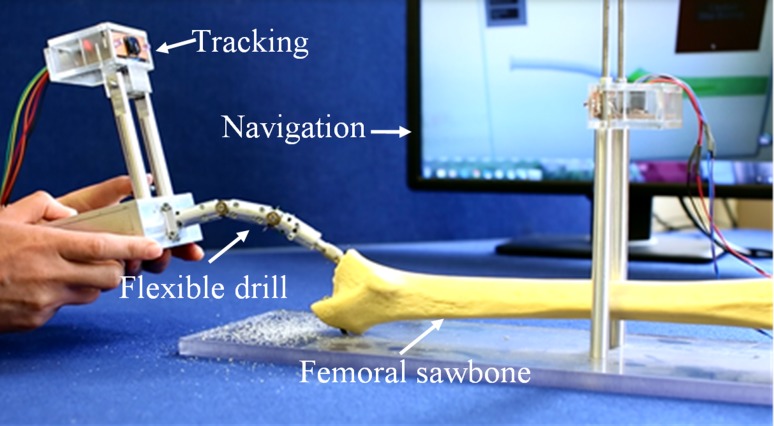
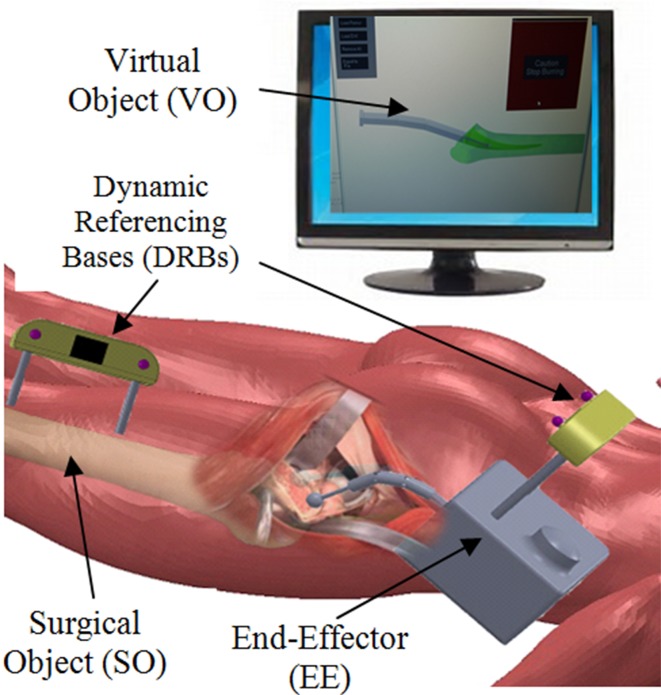
This paper presents a robotic flexible drill and its navigation system for total hip arthroplasty (THA). The new robotic system provides an unprecedented and unique capability to perform curved femoral milling under the guidance of a multimodality navigation system. The robotic system consists of three components. Firstly, a flexible drill manipulator comprises multiple rigid segments that act as a sheath to a flexible shaft with a drill/burr attached to the end. The second part of the robotic system is a hybrid tracking system that consists of an optical tracking system and a position tracking system. Optical tracking units are used to track the surgical objects and tools outside the drilling area, while a rotary encoder placed at each joint of the sheath is synchronized to provide the position information for the flexible manipulator with its virtual object. Finally, the flexible drill is integrated into a computer-aided navigation system. The navigation system provides real time guidance to a surgeon during the procedure. The flexible drill system is then able to implement THA by bone milling. The final section of this paper is an evaluation of the flexible and steerable drill and its navigation system for femoral bone milling in sawbones.
Keywords: Flexible; Navigation; Orthopaedics; Robotics; Steerable; Total hip arthroplasty (THA); Tracking.
Figures
Similar articles
-
A multi-modality tracking, navigation and calibration for a flexible robotic drill system for total hip arthroplasty.Int J Med Robot. 2018 Feb;14(1). doi: 10.1002/rcs.1878. Epub 2017 Dec 12. Int J Med Robot. 2018. PMID: 29230932
-
Computer-assisted orthopaedic surgery and robotic surgery in total hip arthroplasty.Clin Orthop Surg. 2013 Mar;5(1):1-9. doi: 10.4055/cios.2013.5.1.1. Epub 2013 Feb 20. Clin Orthop Surg. 2013. PMID: 23467021 Free PMC article. Review.
-
Active Robotics for Total Hip Arthroplasty.Am J Orthop (Belle Mead NJ). 2016 May-Jun;45(4):256-9. Am J Orthop (Belle Mead NJ). 2016. PMID: 27327918
-
Robotic systems in total hip arthroplasty--is the time ripe for a new approach?Int J Med Robot. 2005 Dec;1(4):8-19. doi: 10.1002/rcs.55. Int J Med Robot. 2005. PMID: 17518400 Review.
-
Intraoperative placement of total hip arthroplasty components with robotic-arm assisted technology correlates with postoperative implant position: a CT-based study.Bone Joint J. 2018 Oct;100-B(10):1303-1309. doi: 10.1302/0301-620X.100B10-BJJ-2018-0201.R1. Bone Joint J. 2018. PMID: 30295538 Clinical Trial.
Cited by
-
An Active Steering Hand-held Robotic System for Minimally Invasive Orthopaedic Surgery Using a Continuum Manipulator.IEEE Robot Autom Lett. 2021 Apr;6(2):1622-1629. doi: 10.1109/lra.2021.3059634. Epub 2021 Feb 16. IEEE Robot Autom Lett. 2021. PMID: 33869745 Free PMC article.
-
Robotic-Assisted 3D Bio-printing for Repairing Bone and Cartilage Defects through a Minimally Invasive Approach.Sci Rep. 2019 Mar 6;9(1):3746. doi: 10.1038/s41598-019-38972-2. Sci Rep. 2019. PMID: 30842477 Free PMC article.
-
Drilling around the corner: a comprehensive literature review of steerable bone drills.Front Med Technol. 2025 Apr 9;7:1426858. doi: 10.3389/fmedt.2025.1426858. eCollection 2025. Front Med Technol. 2025. PMID: 40271520 Free PMC article. Review.
References
-
- Alambeigi F, Wang Y, Sefati S, Gao C, Murthy RJ, Iordachita I, Taylor RH, Khanuja H, Armand M. A curved-drilling approach in core decompression of the femoral head osteonecrosis using a continuum manipulator. IEEE Robot. Autom. Lett. 2017;2:1480–1487. doi: 10.1109/LRA.2017.2668469. - DOI
-
- Banks S. Haptic robotics enable a system approach to design of a minimally invasive modular knee arthroplasty. Am. J. Orthop. 2009;38:23–27. - PubMed
-
- Beasley R. Medical robots: current systems and research directions. J. Robot. 2012
MeSH terms
LinkOut - more resources
Full Text Sources
Other Literature Sources
Medical
