

PlantCV v2: Image analysis software for high-throughput plant phenotyping
- PMID: 29209576
- PMCID: PMC5713628
- DOI: 10.7717/peerj.4088
PlantCV v2: Image analysis software for high-throughput plant phenotyping
Abstract
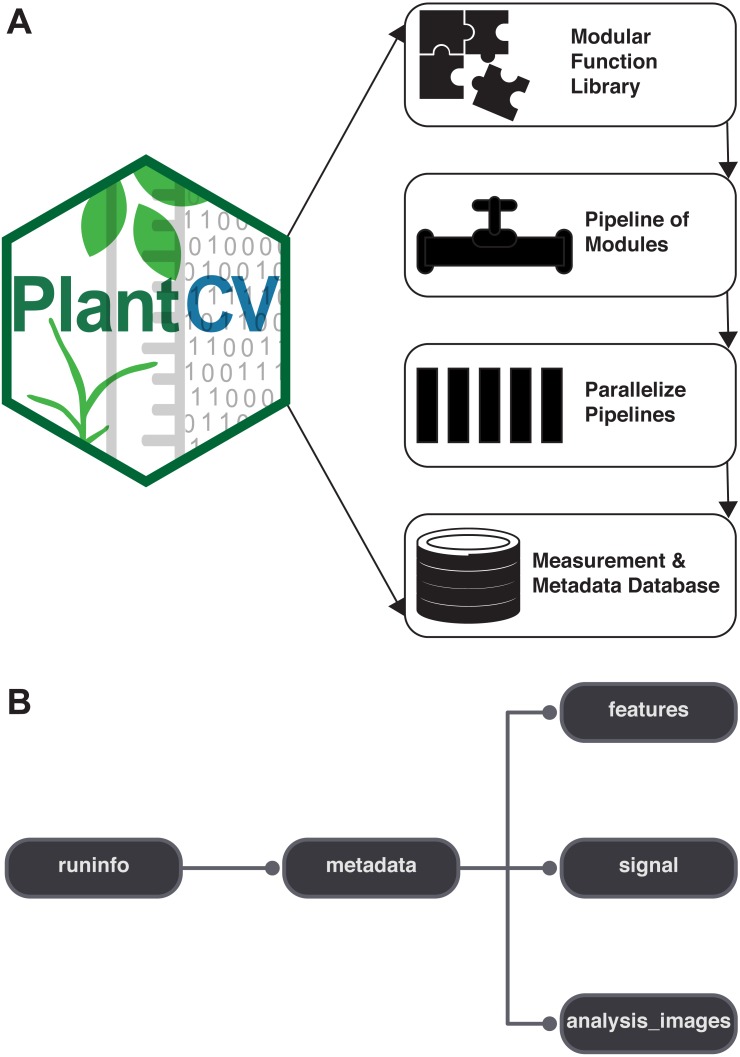
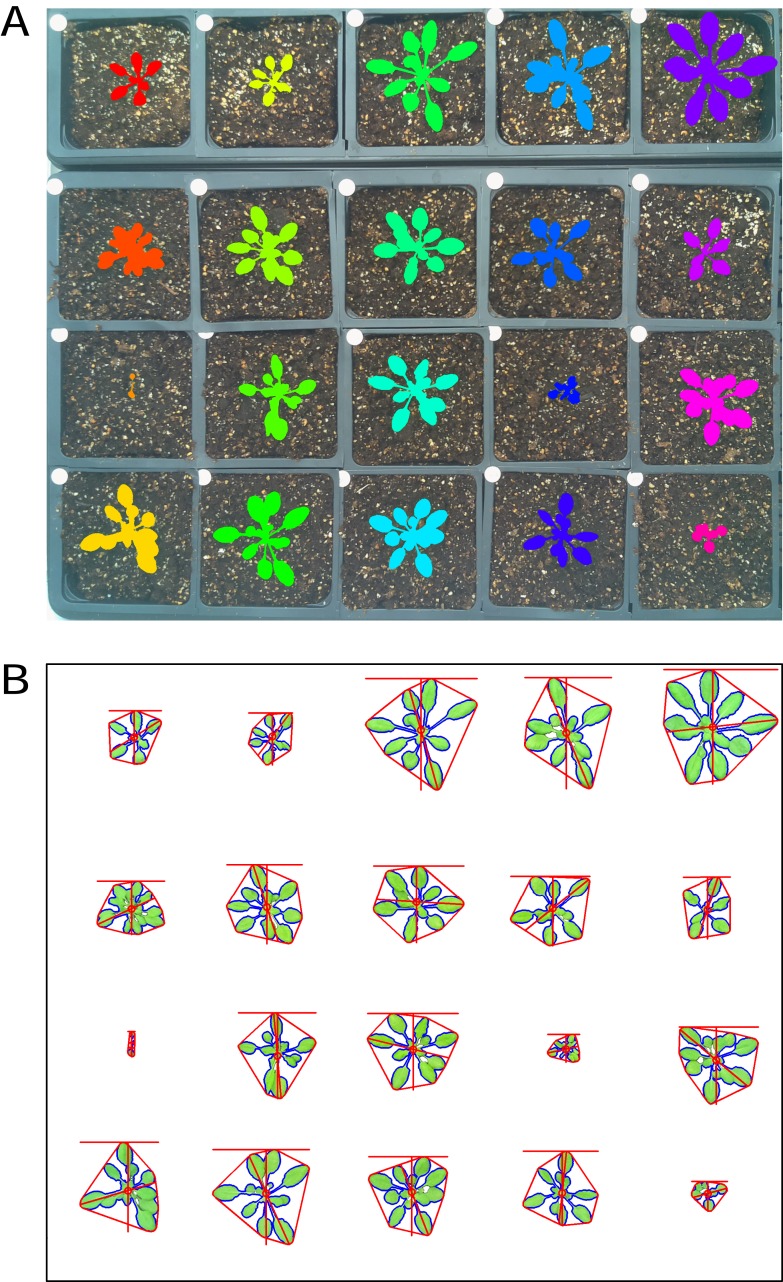
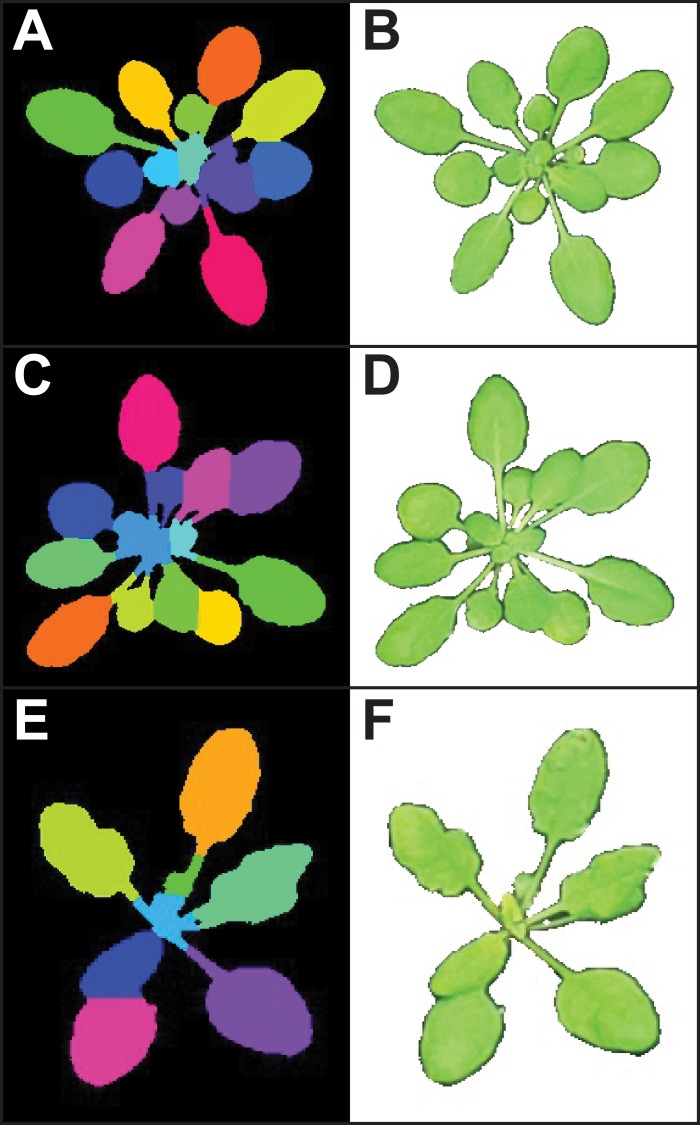
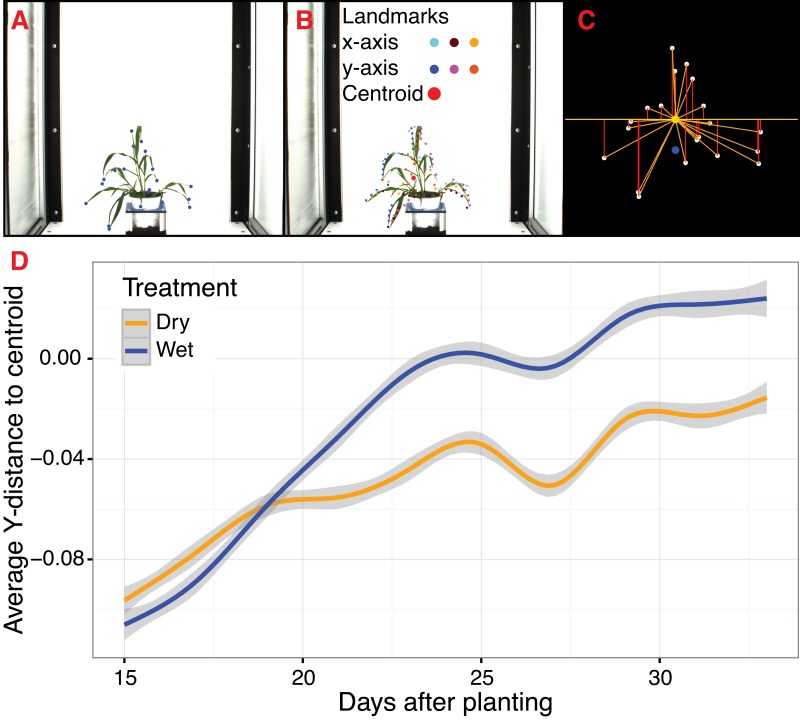
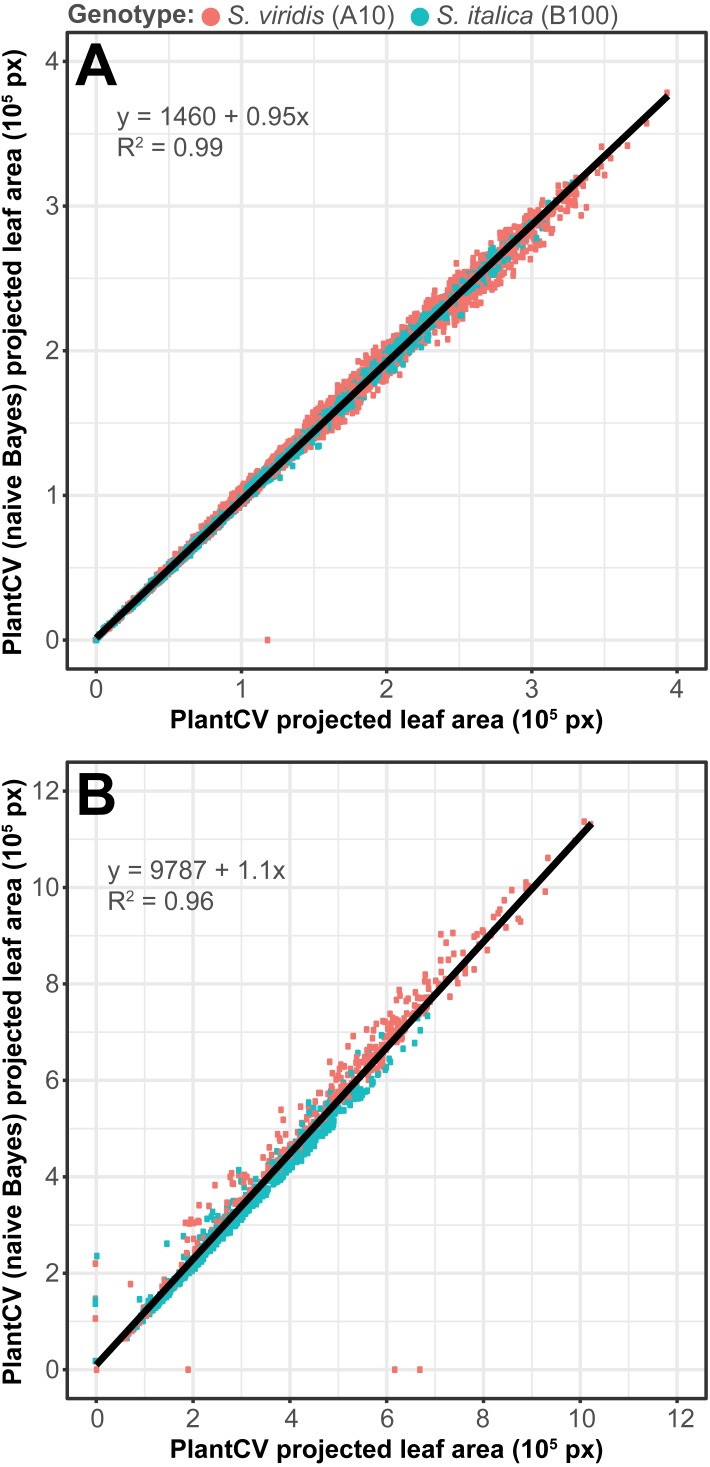
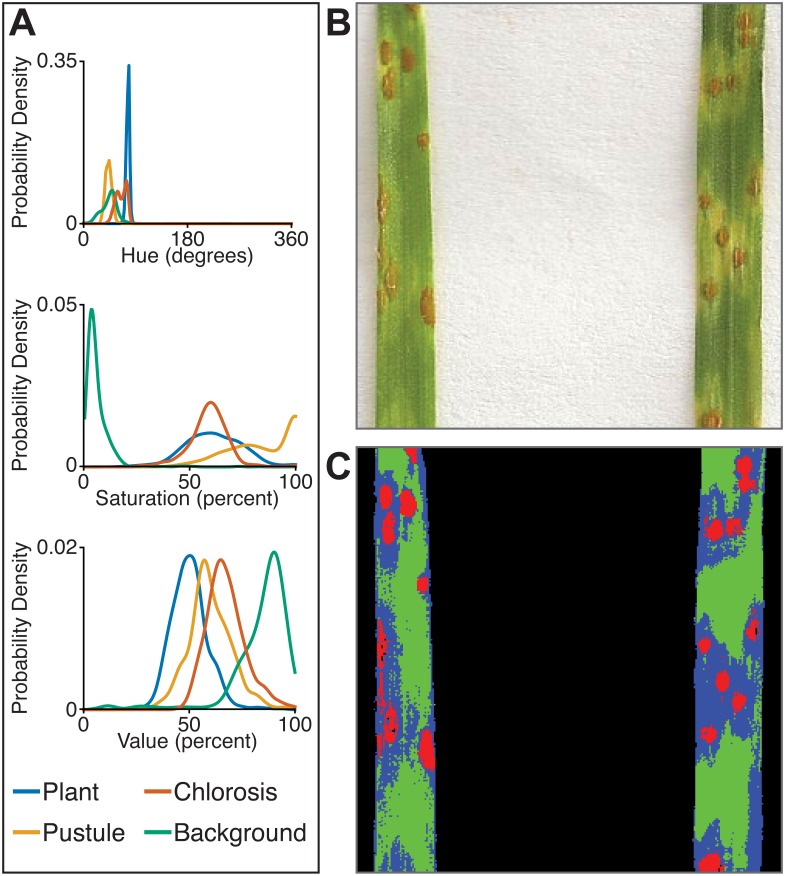
Systems for collecting image data in conjunction with computer vision techniques are a powerful tool for increasing the temporal resolution at which plant phenotypes can be measured non-destructively. Computational tools that are flexible and extendable are needed to address the diversity of plant phenotyping problems. We previously described the Plant Computer Vision (PlantCV) software package, which is an image processing toolkit for plant phenotyping analysis. The goal of the PlantCV project is to develop a set of modular, reusable, and repurposable tools for plant image analysis that are open-source and community-developed. Here we present the details and rationale for major developments in the second major release of PlantCV. In addition to overall improvements in the organization of the PlantCV project, new functionality includes a set of new image processing and normalization tools, support for analyzing images that include multiple plants, leaf segmentation, landmark identification tools for morphometrics, and modules for machine learning.
Keywords: Computer vision; Image analysis; Machine learning; Morphometrics; Plant phenotyping.
Conflict of interest statement
Malia A. Gehan, Noah Fahlgren, Arash Abbasi, Jeffrey C. Berry, Steven T. Callen, Leonardo Chavez, Max J. Feldman, Kerrigan B. Gilbert, Steen Hoyer, Andy Lin, César Lizárraga, Michael Miller and Monica Tessman contributed to the research described while working at the Donald Danforth Plant Science Center, a 501(c)(3) nonprofit research institute. Suxing Liu and Argelia Lorence contributed to the research described while working at the University of Arkansas. John G. Hodge and Andrew N. Doust contributed to the research described while working at the University of Oklahoma. Eric Platon contributed to the research described while working as a founder and employee of Cosmos X. Tony Sax contributed to the research described while a full-time student at the Missouri University of Science and Technology.
Figures
References
-
- Abbasi A, Fahlgren N. Naive Bayes pixel-level plant segmentation. 2016 IEEE western New York image and signal processing workshop (WNYISPW); 2016. pp. 1–4. - DOI
-
- Bookstein FL. Morphometric tools for landmark data. Cambridge University Press; New York: 1991.
-
- Bookstein FL. Morphometric tools for landmark data: geometry and biology. Cambridge University Press; New York: 1997.
LinkOut - more resources
Full Text Sources
Other Literature Sources
