

Electrically Driven Microengineered Bioinspired Soft Robots
- PMID: 29323433
- PMCID: PMC6082116
- DOI: 10.1002/adma.201704189
Electrically Driven Microengineered Bioinspired Soft Robots
Abstract
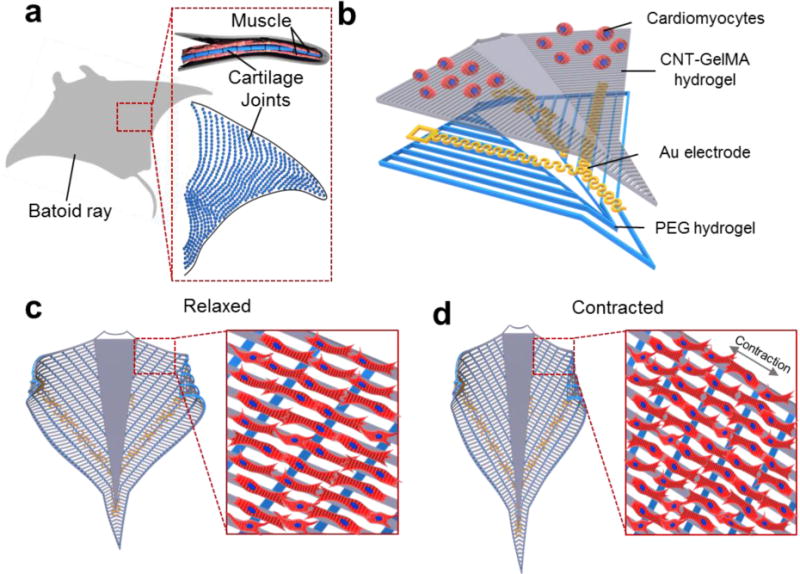
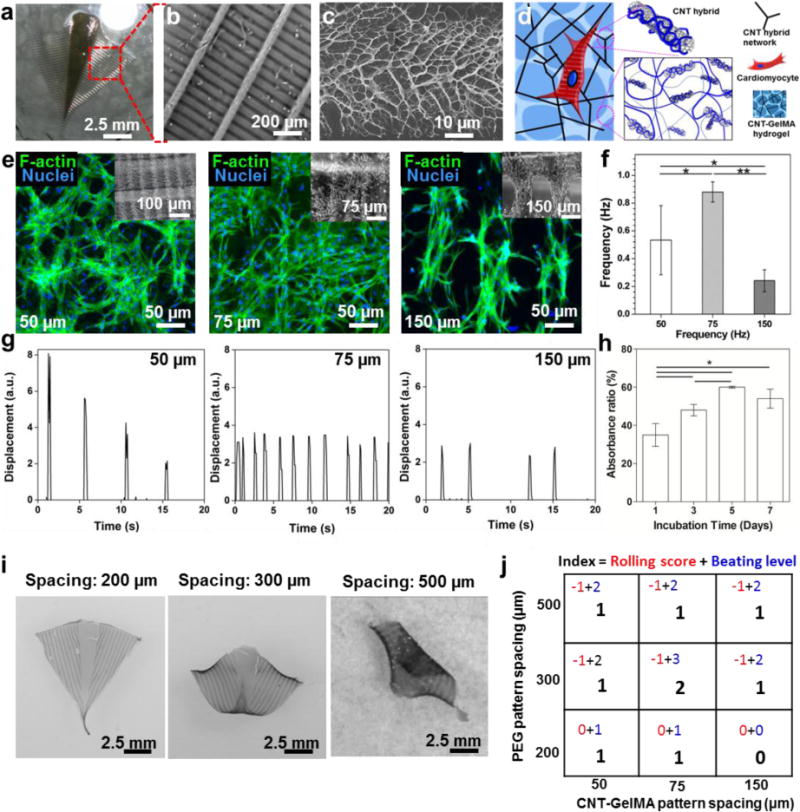
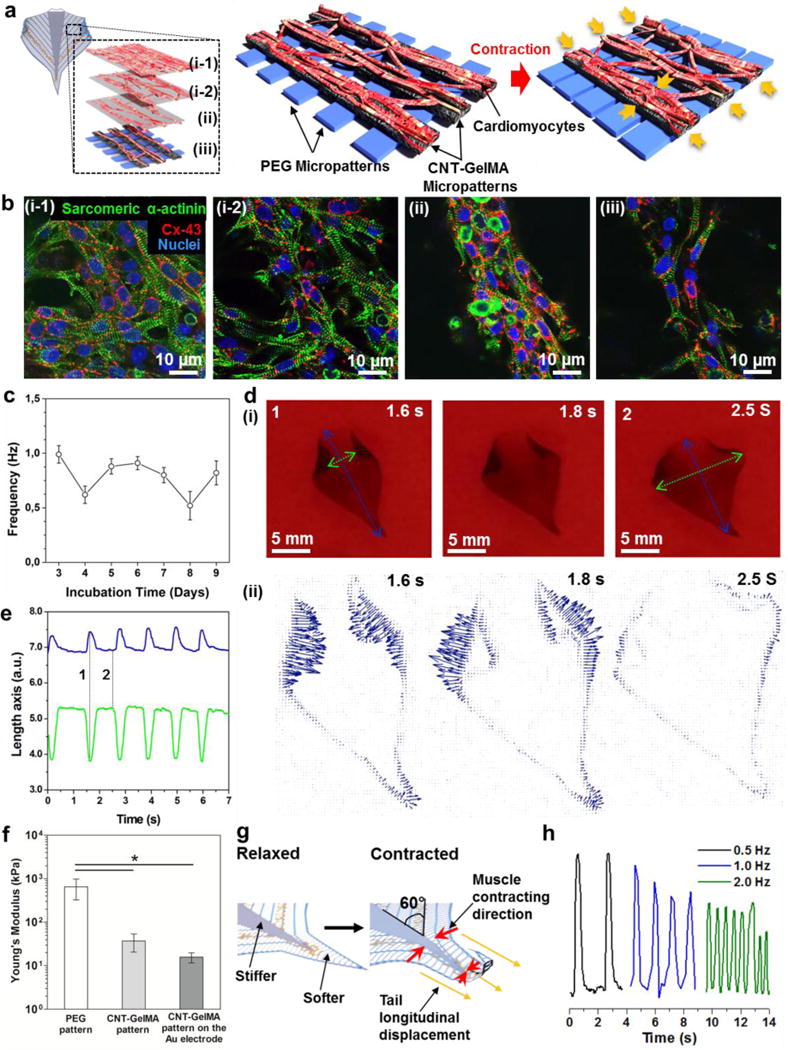
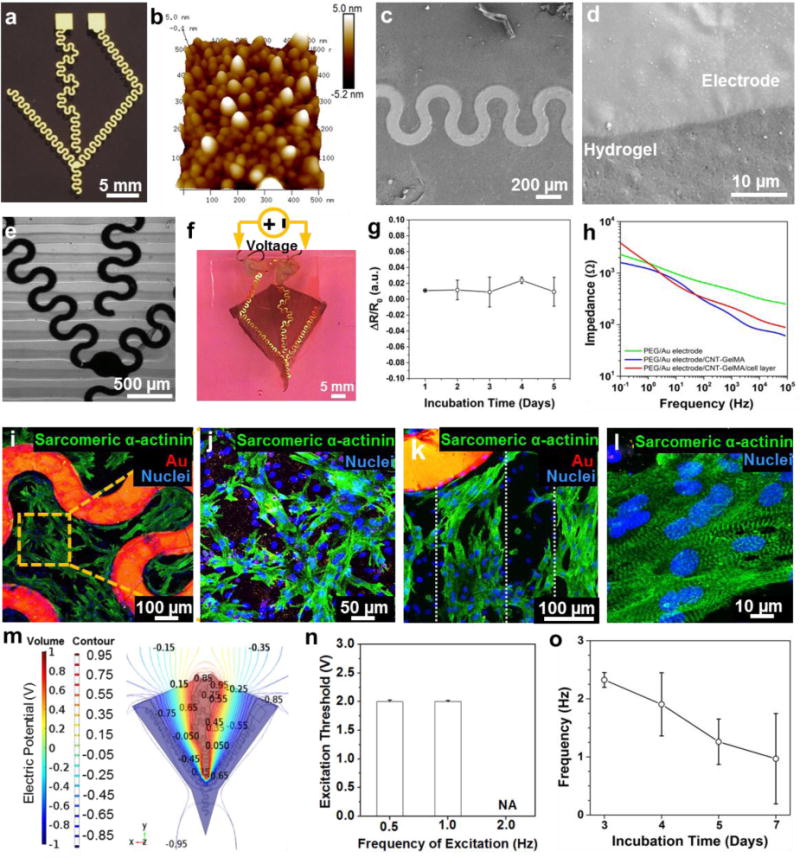
To create life-like movements, living muscle actuator technologies have borrowed inspiration from biomimetic concepts in developing bioinspired robots. Here, the development of a bioinspired soft robotics system, with integrated self-actuating cardiac muscles on a hierarchically structured scaffold with flexible gold microelectrodes is reported. Inspired by the movement of living organisms, a batoid-fish-shaped substrate is designed and reported, which is composed of two micropatterned hydrogel layers. The first layer is a poly(ethylene glycol) hydrogel substrate, which provides a mechanically stable structure for the robot, followed by a layer of gelatin methacryloyl embedded with carbon nanotubes, which serves as a cell culture substrate, to create the actuation component for the soft body robot. In addition, flexible Au microelectrodes are embedded into the biomimetic scaffold, which not only enhance the mechanical integrity of the device, but also increase its electrical conductivity. After culturing and maturation of cardiomyocytes on the biomimetic scaffold, they show excellent myofiber organization and provide self-actuating motions aligned with the direction of the contractile force of the cells. The Au microelectrodes placed below the cell layer further provide localized electrical stimulation and control of the beating behavior of the bioinspired soft robot.
Keywords: bioactuators; bioinspiration; cardiac tissue engineering; flexible microelectrodes; hydrogels.
© 2018 WILEY-VCH Verlag GmbH & Co. KGaA, Weinheim.
Figures
References
-
- Holley MT, Nagarajan N, Danielson C, Zorlutuna P, Park K. Lab Chip. 2016;16:3473. - PubMed
- Park SJ, Gazzola M, Park KS, Park S, Di Santo V, Blevins EL, Lind JU, Campbell PH, Dauth S, Capulli AK, Pasqualini FS, Ahn S, Cho A, Yuan H, Maoz BM, Vijaykumar R, Choi JW, Deisseroth K, Lauder GV, Mahadevan L, Parker KK. Science. 2016;353:158. - PMC - PubMed
-
- Nawroth JC, Lee H, Feinberg AW, Ripplinger CM, McCain ML, Grosberg A, Dabiri JO, Parker KK. Nature Biotechnology. 2012;30:792. - PMC - PubMed
- Herr H, Dennis RG. Journal of NeuroEngineering and Rehabilitation. 2004;1 - PMC - PubMed
- Cvetkovic C, Raman R, Chan V, Williams BJ, Tolish M, Bajaj P, Sakar MS, Asada HH, Saif MTA, Bashir R. Proceedings of the National Academy of Sciences of the United States of America. 2014;111:10125. - PMC - PubMed
- Kim J, Park J, Yang S, Baek J, Kim B, Lee SH, Yoon ES, Chun K, Park S. Lab on a Chip - Miniaturisation for Chemistry and Biology. 2007;7:1504. - PubMed
- Shin SR, Jung SM, Zalabany M, Kim K, Zorlutuna P, Kim SB, Nikkhah M, Khabiry M, Azize M, Kong J, Wan KT, Palacios T, Dokmeci MR, Bae H, Tang X, Khademhosseini A. ACS Nano. 2013;7:2369. - PMC - PubMed
- Feinberg AW, Feigel A, Shevkoplyas SS, Sheehy S, Whitesides GM, Parker KK. Science. 2007;317:1366. - PubMed
- Xi J, Schmidt JJ, Montemagno CD. Nat Mater. 2005;4:180. - PubMed
- Chan V, Park K, Collens MB, Kong H, Saif TA, Bashir R. Sci Rep. 2012;2:857. - PMC - PubMed
- Chan V, Jeong JH, Bajaj P, Collens M, Saif T, Kong H, Bashir R. Lab Chip. 2012;12:88. - PubMed
- Williams BJ, Anand SV, Rajagopalan J, Saif MT. Nat Commun. 2014;5:3081. - PubMed
-
- Rus D, Tolley MT. Nature. 2015;521:467. - PubMed
MeSH terms
Substances
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources
