

The effects of gait training using powered lower limb exoskeleton robot on individuals with complete spinal cord injury
- PMID: 29506530
- PMCID: PMC5838988
- DOI: 10.1186/s12984-018-0355-1
The effects of gait training using powered lower limb exoskeleton robot on individuals with complete spinal cord injury
Abstract
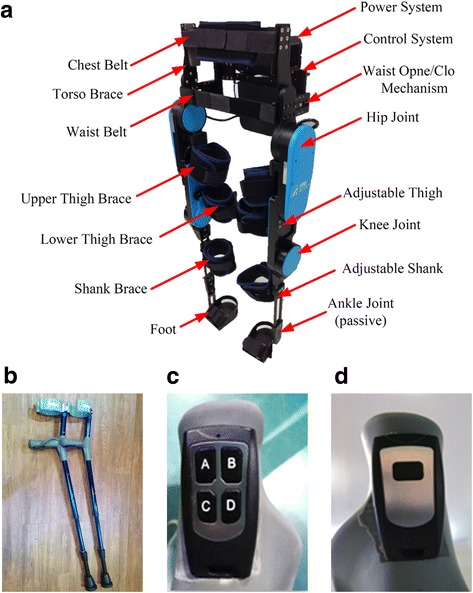
Background: Powered exoskeleton can improve the mobility for people with movement deficits by providing mechanical support and facilitate the gait training. This pilot study evaluated the effect of gait training using a newly developed powered lower limb exoskeleton robot for individuals with complete spinal cord injury (SCI).
Methods: Two participants with a complete SCI were recruited for this clinical study. The powered exoskeleton gait training was 8 weeks, 1 h per session, and 2 sessions per week. The evaluation was performed before and after the training for (1) the time taken by the user to don and doff the powered exoskeleton independently, (2) the level of exertion perceived by participants while using the powered exoskeleton, and (3) the mobility performance included the timed up-and-go test, 10-m walk test, and 6-min walk test with the powered exoskeleton. The safety of the powered exoskeleton was evaluated on the basis of injury reports and the incidence of falls or imbalance while using the device.
Results: The results indicated that the participants were donning and doffing the powered lower limb exoskeleton robot independently with a lower level of exertion and walked faster and farther without any injury or fall incidence when using the powered exoskeleton than when using a knee-ankle-foot orthosis. Bone mineral densities was also increased after the gait training. No adverse effects, such as skin abrasions, or discomfort were reported while using the powered exoskeleton.
Conclusions: The findings demonstrated that individuals with complete SCI used the powered lower limb exoskeleton robot independently without any assistance after 8 weeks of powered exoskeleton gait training.
Trial registration: Trial registration: National Taiwan University Hospital.
Trial registration number: 201210051RIB . Name of registry: Hui-Fen Mao. URL of registry: Not available. Date of registration: December 12th, 2012. Date of enrolment of the first participant to the trial: January 3rd, 2013.
Keywords: Assistive device; Complete spinal injury; Exoskeleton robot; Gait; Training.
Conflict of interest statement
Ethics approval and consent to participate
This study was approved by the institutional review board by the National Taiwan University Hospital Institutional Review Board, and the participants were provided informed consent after a full explanation of the purpose and protocol of this study. All coauthors have no conflicts of interest to report.
Competing interests
The authors declare that they have no competing interests.
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Figures

References
-
- Fatone S. A review of the literature pertaining to KAFOs and HKAFOs for ambulation. J Prosthet Orthot. 2006;18:137–168. doi: 10.1097/00008526-200606001-00003. - DOI
-
- Young A, Foss J, Gannon H, Ferris DP. Influence of power delivery timing on the energetics and biomechanics of humans wearing a hip exoskeleton. Front Bioeng Biotechnol. 2017;5. https://www.ncbi.nlm.nih.gov/pmc/articles/PMC5340778/. - PMC - PubMed
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
Other Literature Sources
Medical
