

Development and validation of a high-speed stereoscopic eyetracker
- PMID: 29508237
- PMCID: PMC6267515
- DOI: 10.3758/s13428-018-1026-7
Development and validation of a high-speed stereoscopic eyetracker
Abstract
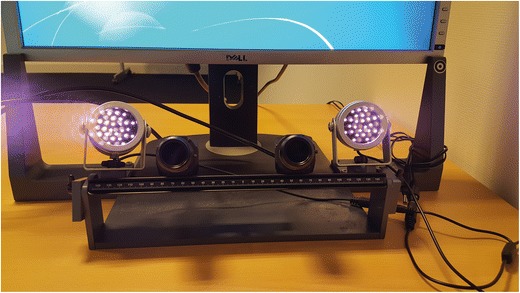
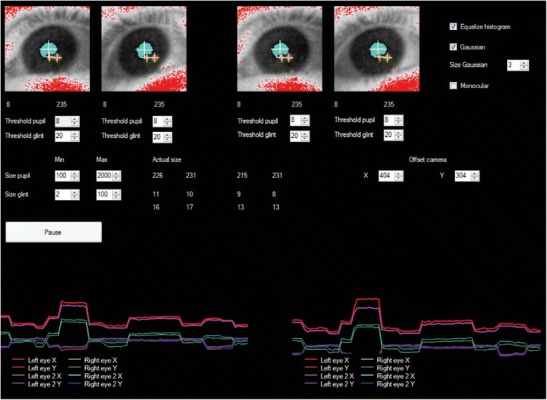
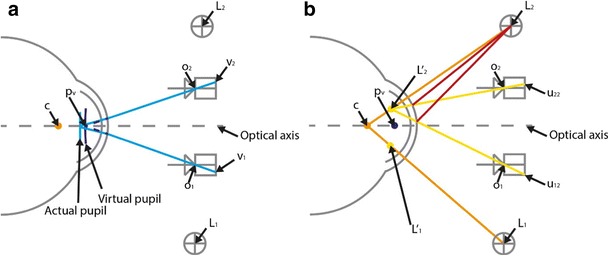
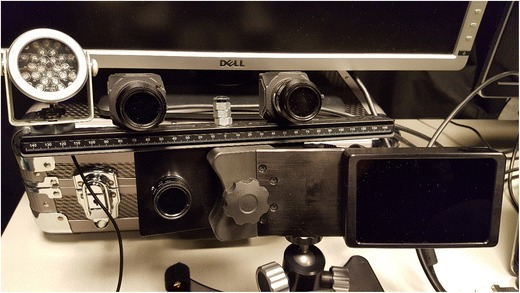
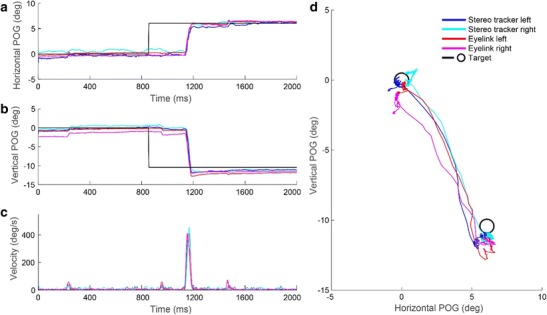
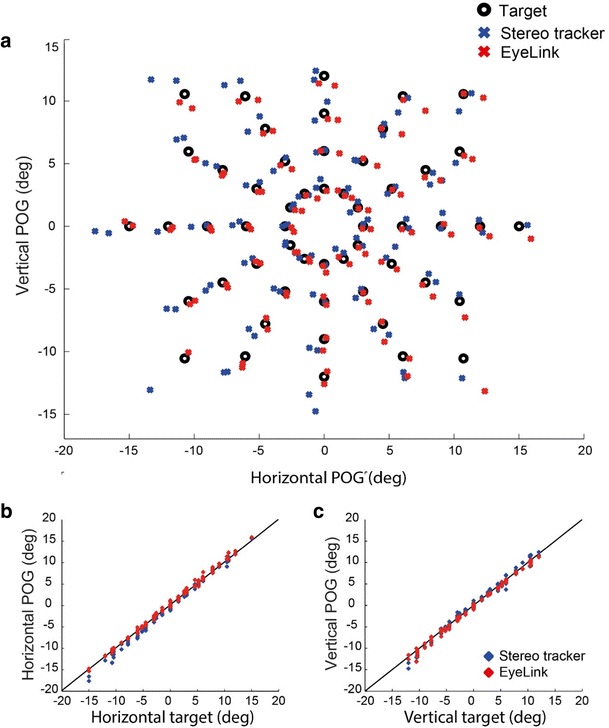
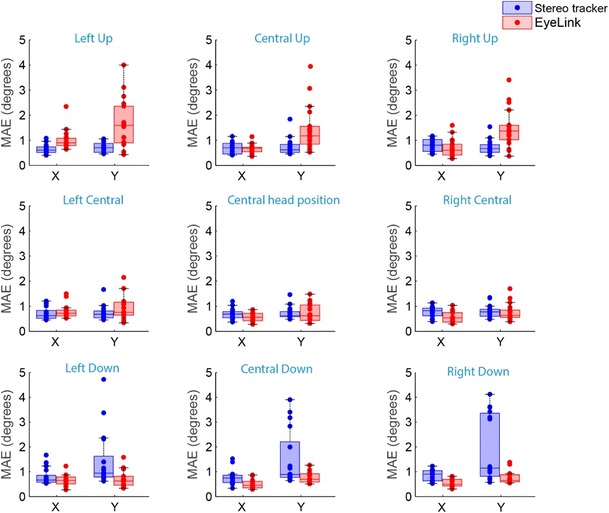
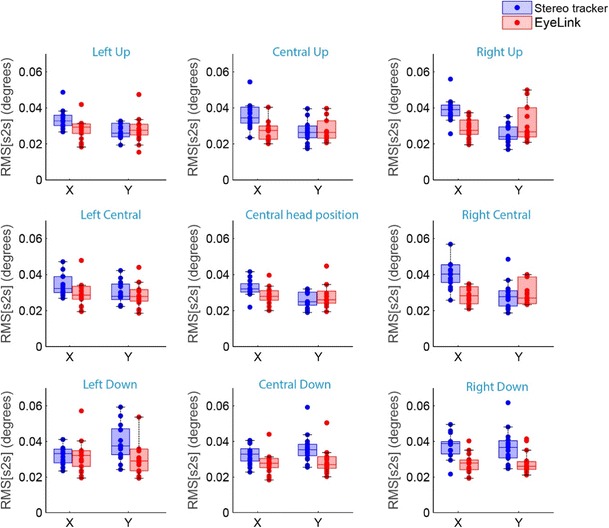
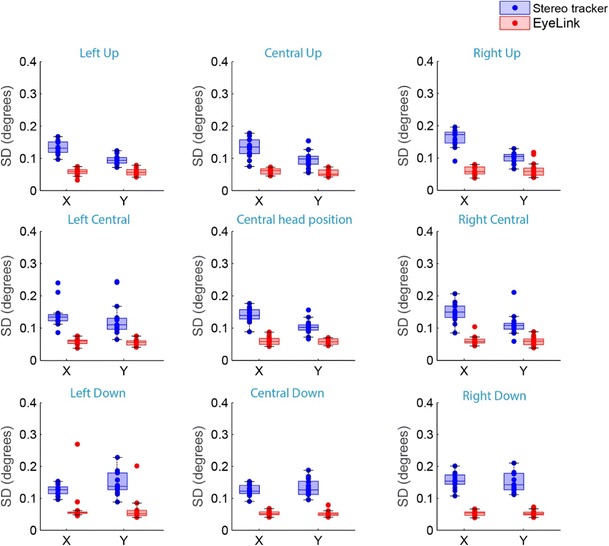
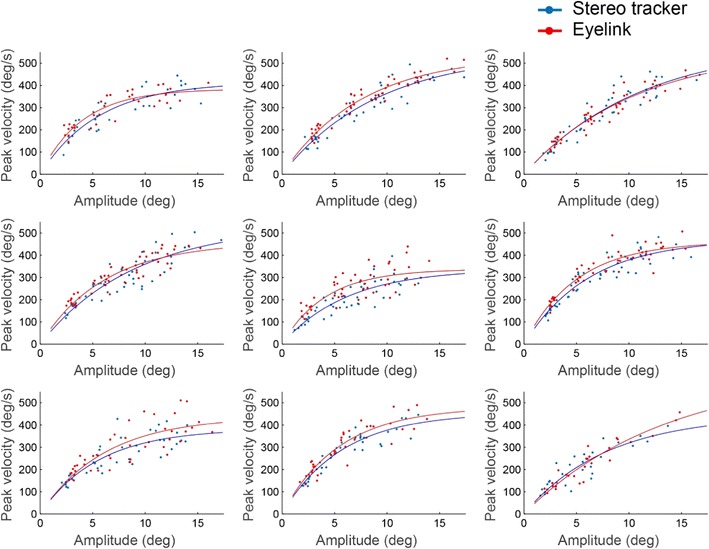
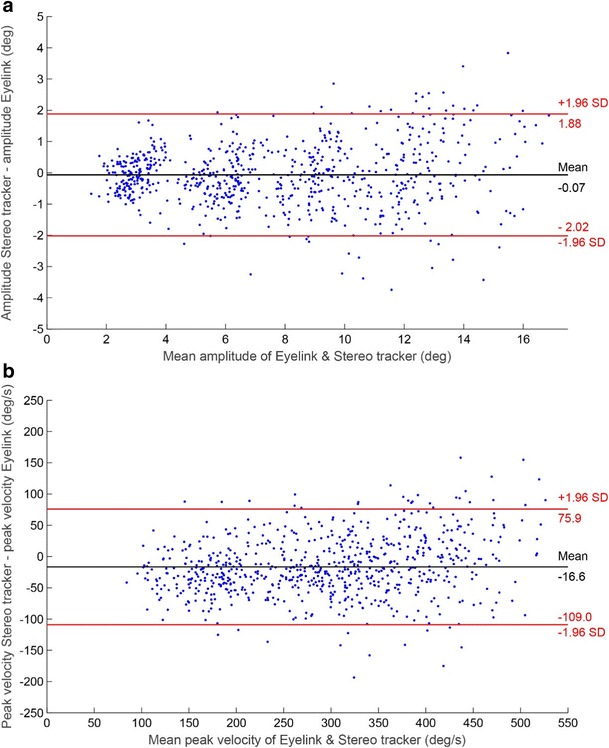
Traditional video-based eyetrackers require participants to perform an individual calibration procedure, which involves the fixation of multiple points on a screen. However, certain participants (e.g., people with oculomotor and/or visual problems or infants) are unable to perform this task reliably. Previous work has shown that with two cameras one can estimate the orientation of the eyes' optical axis directly. Consequently, only one calibration point is needed to determine the deviation between an eye's optical and visual axes. We developed a stereo eyetracker with two USB 3.0 cameras and two infrared light sources that can track both eyes at ~ 350 Hz for eccentricities of up to 20°. A user interface allows for online monitoring and threshold adjustments of the pupil and corneal reflections. We validated this tracker by collecting eye movement data from nine healthy participants and compared these data to eye movement records obtained simultaneously with an established eyetracking system (EyeLink 1000 Plus). The results demonstrated that the two-dimensional accuracy of our portable system is better than 1°, allowing for at least ± 5-cm head motion. Its resolution is better than 0.2° (SD), and its sample-to-sample noise is less than 0.05° (RMS). We concluded that our stereo eyetracker is a valid instrument, especially in settings in which individual calibration is challenging.
Keywords: Eye movements; Eyetracking; Head movement; Stereo eyetracking.
Figures
References
-
- Bahill A.Terry, Clark Michael R., Stark Lawrence. The main sequence, a tool for studying human eye movements. Mathematical Biosciences. 1975;24(3-4):191–204. doi: 10.1016/0025-5564(75)90075-9. - DOI
-
- Beymer, D., & Flickner, M. (2003). Eye gaze tracking using an active stereo head. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition (Vol. 2, pp. 451–458). Piscataway, NJ: IEEE Press. 10.1109/CVPR.2003.1211502
-
- Bradski G, Kaehler A. Learning OpenCV. Sebastopol, CA: O’Reilly Media; 2008.
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
Other Literature Sources
