

EquiMoves: A Wireless Networked Inertial Measurement System for Objective Examination of Horse Gait
- PMID: 29534022
- PMCID: PMC5877382
- DOI: 10.3390/s18030850
EquiMoves: A Wireless Networked Inertial Measurement System for Objective Examination of Horse Gait
Abstract
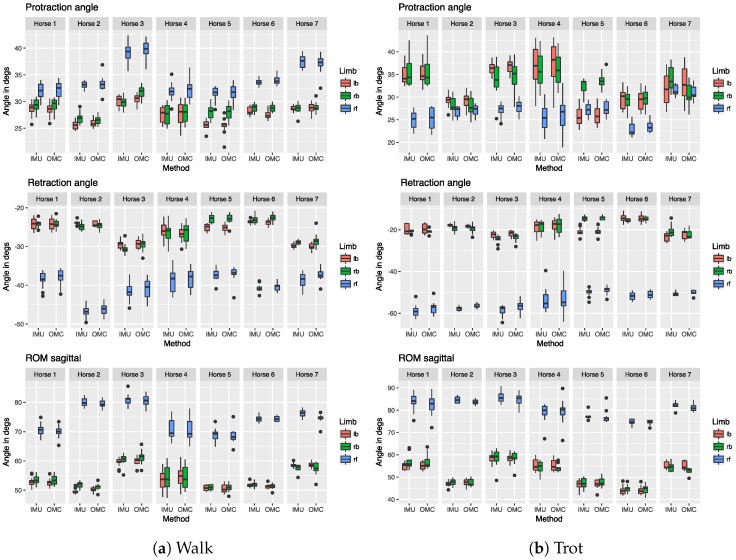
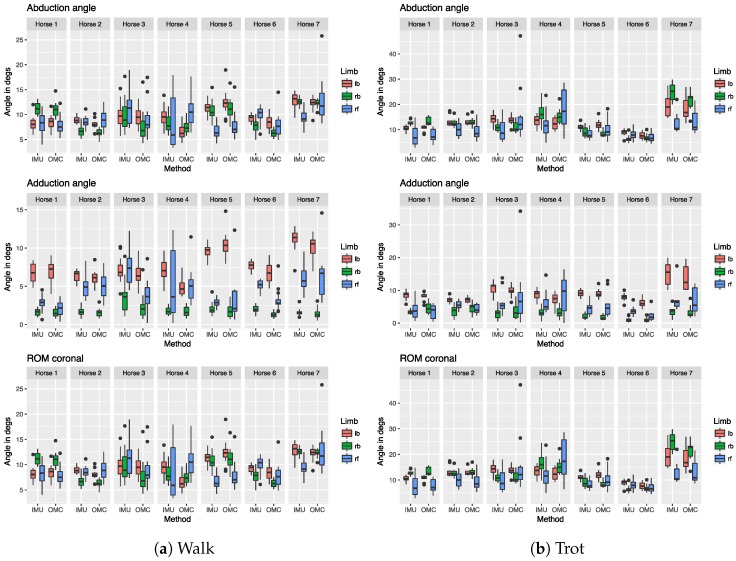
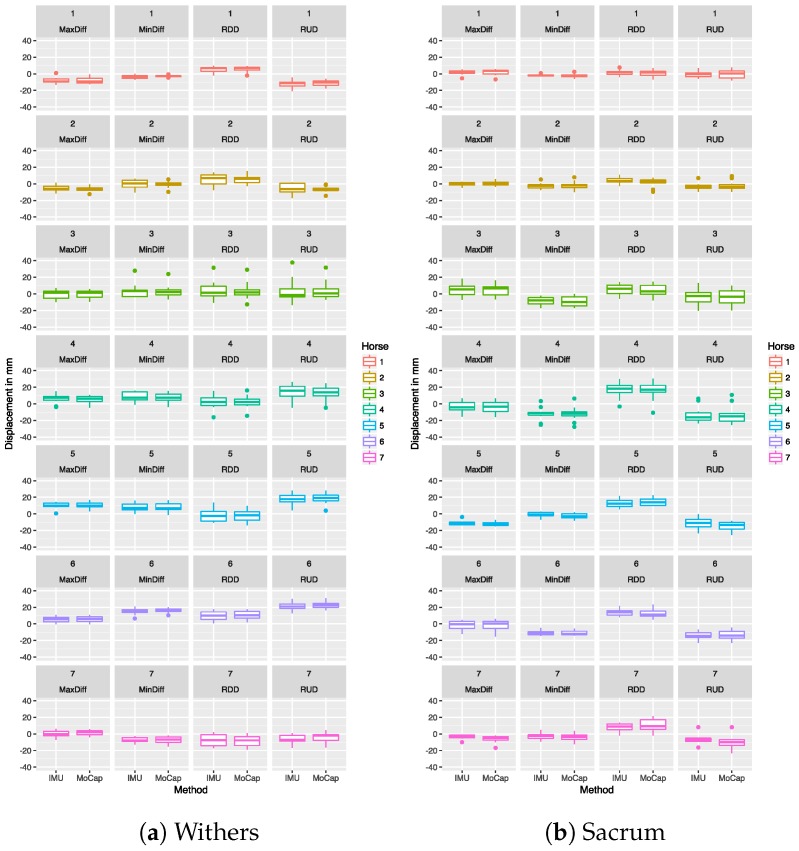
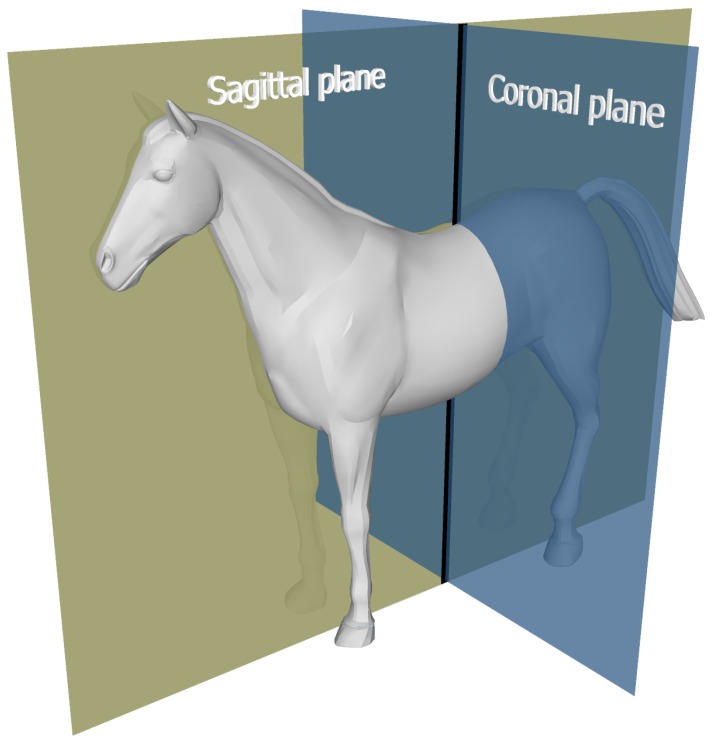
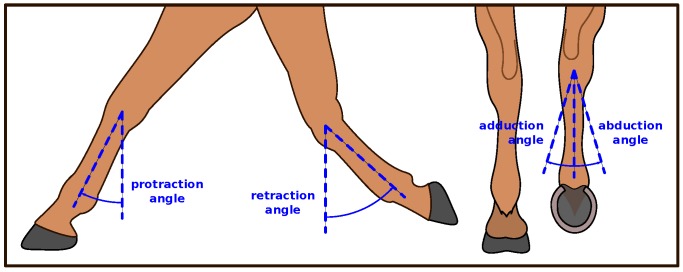
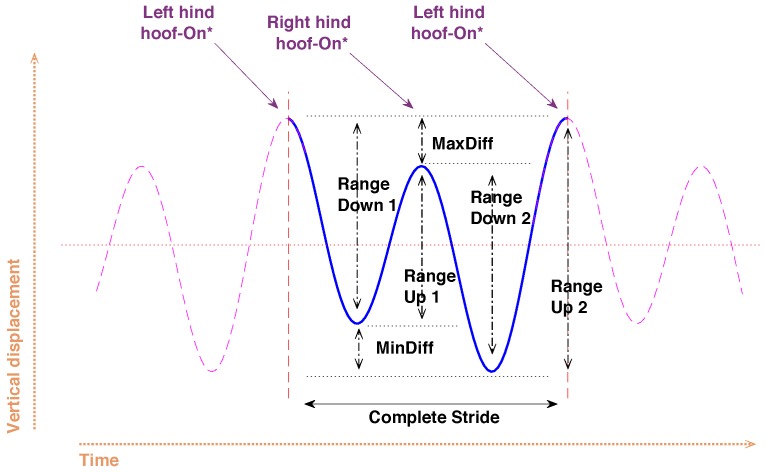
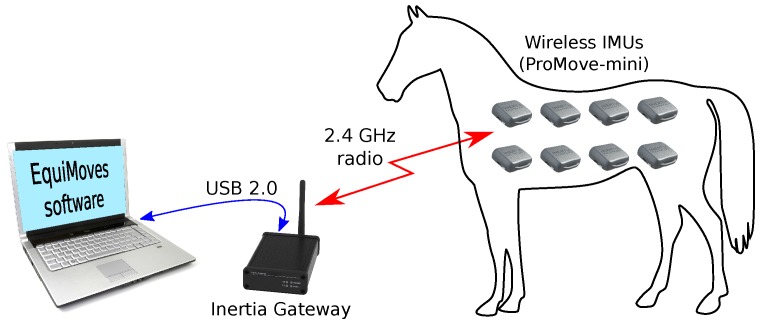
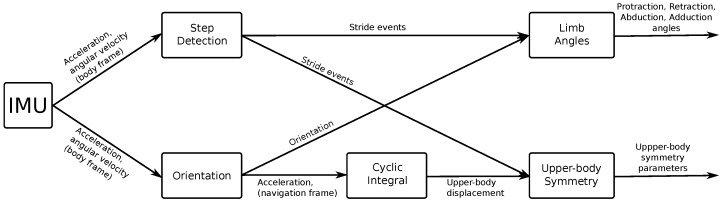
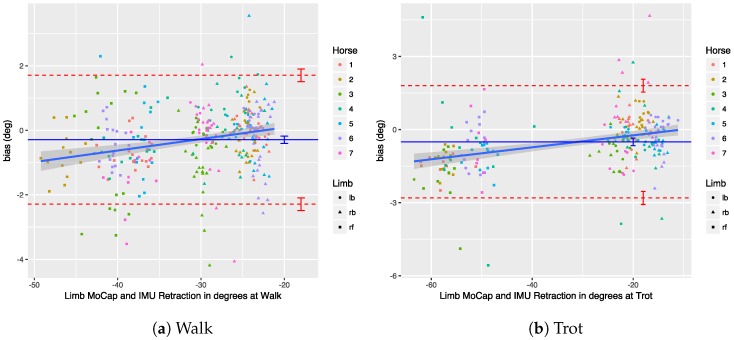
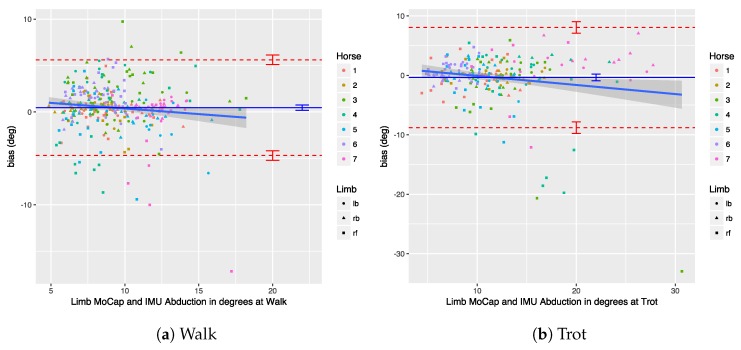
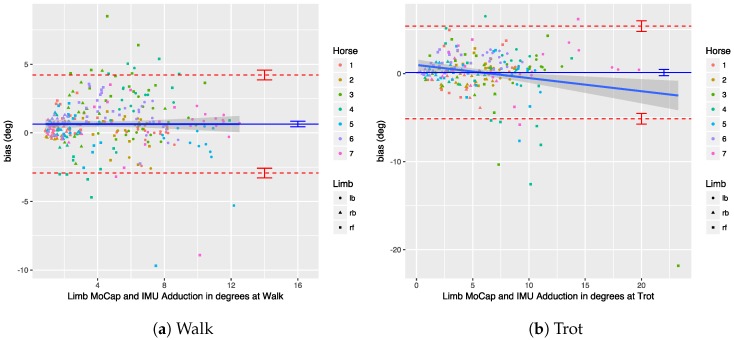
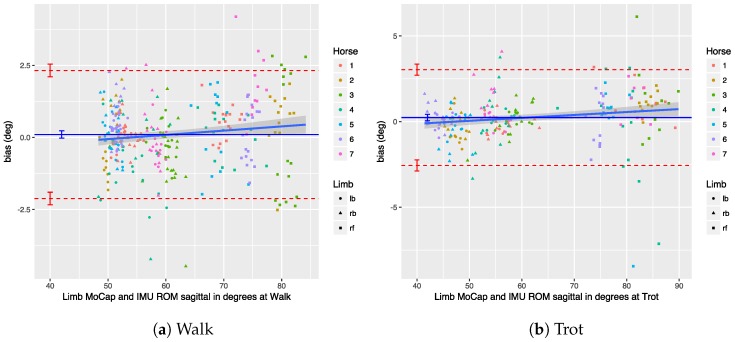
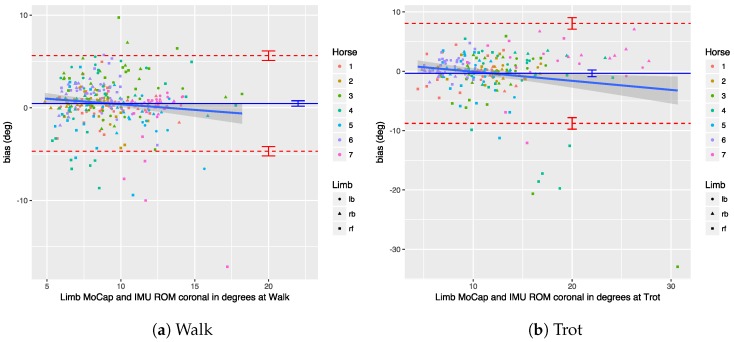
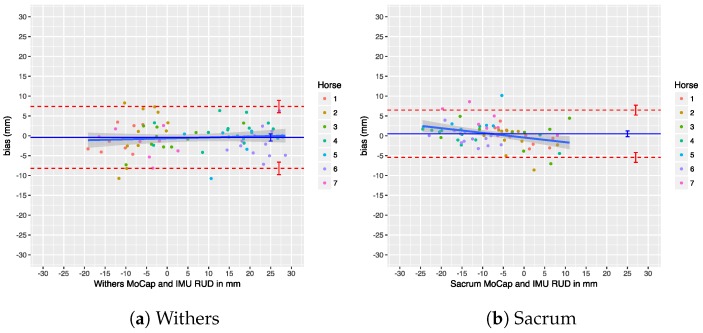
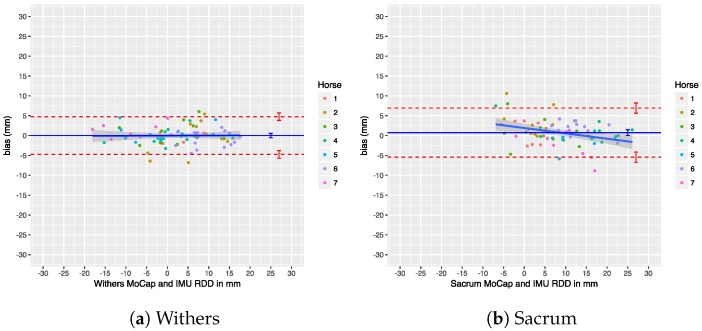
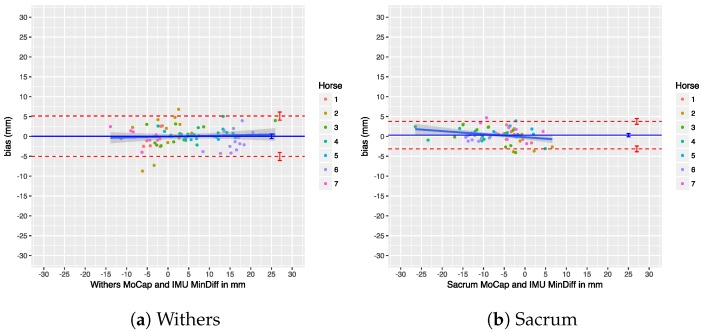
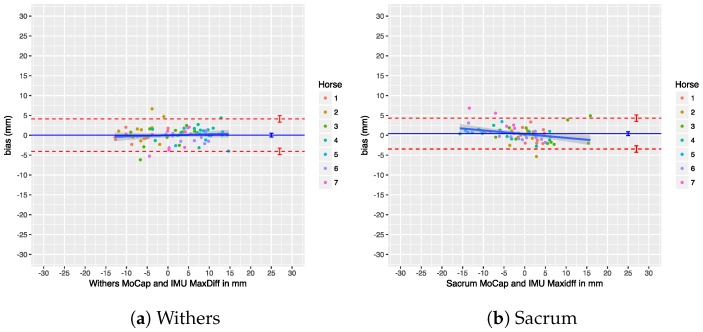
In this paper, we describe and validate the EquiMoves system, which aims to support equine veterinarians in assessing lameness and gait performance in horses. The system works by capturing horse motion from up to eight synchronized wireless inertial measurement units. It can be used in various equine gait modes, and analyzes both upper-body and limb movements. The validation against an optical motion capture system is based on a Bland-Altman analysis that illustrates the agreement between the two systems. The sagittal kinematic results (protraction, retraction, and sagittal range of motion) show limits of agreement of ± 2.3 degrees and an absolute bias of 0.3 degrees in the worst case. The coronal kinematic results (adduction, abduction, and coronal range of motion) show limits of agreement of - 8.8 and 8.1 degrees, and an absolute bias of 0.4 degrees in the worst case. The worse coronal kinematic results are most likely caused by the optical system setup (depth perception difficulty and suboptimal marker placement). The upper-body symmetry results show no significant bias in the agreement between the two systems; in most cases, the agreement is within ±5 mm. On a trial-level basis, the limits of agreement for withers and sacrum are within ±2 mm, meaning that the system can properly quantify motion asymmetry. Overall, the bias for all symmetry-related results is less than 1 mm, which is important for reproducibility and further comparison to other systems.
Keywords: IMU; agreement analysis; gait analysis; horse; lameness; optical motion capture.
Conflict of interest statement
Mihai Marin-Perianu, Raluca Marin-Perianu and Paul Havinga founded Inertia-Technology B.V. (Enschede, The Netherlands), which sells the inertial sensor system (ProMove-mini) that is used as the basis of the EquiMoves system, which is evaluated in this study. Stephan Bosch and Berend-Jan van der Zwaag are employees of Inertia-Technology B.V.
Figures


References
-
- United States. National Animal Health Monitoring System (U.S.) National Economic Cost of Equine Lameness, Colic, and Equine Protozoal Myeloencephalitis (EPM) in the United States. U.S. Department of Agriculture, APHIS; Fort Collins, CO, USA: 2001.
-
- Loomans J.B.A., Stolk P.W.T., van Weeren P.R., Vaarkamp H., Barneveld A. A survey of the workload and clinical skills in current equine practices in The Netherlands. Equine Vet. Educ. 2007;19:162–168. doi: 10.2746/095777307X186875. - DOI
MeSH terms
LinkOut - more resources
Full Text Sources
Other Literature Sources
