

Illusory movement perception improves motor control for prosthetic hands
- PMID: 29540617
- PMCID: PMC5906050
- DOI: 10.1126/scitranslmed.aao6990
Illusory movement perception improves motor control for prosthetic hands
Abstract
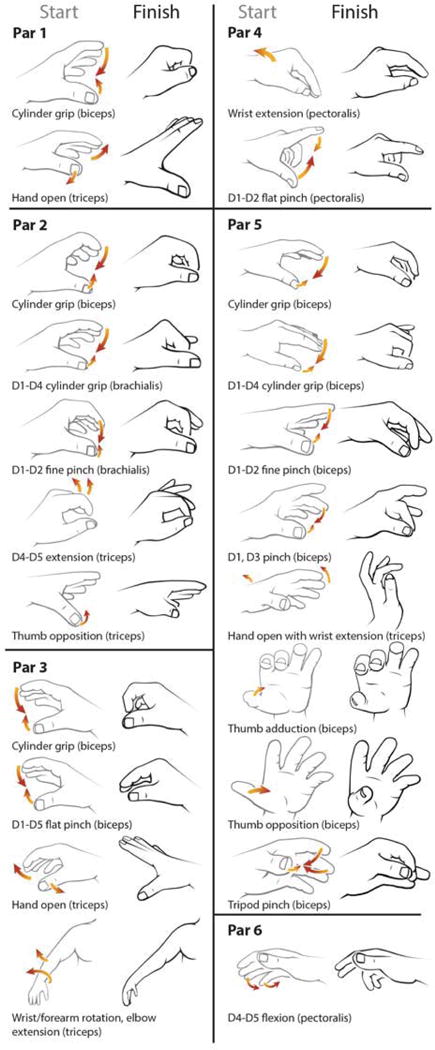
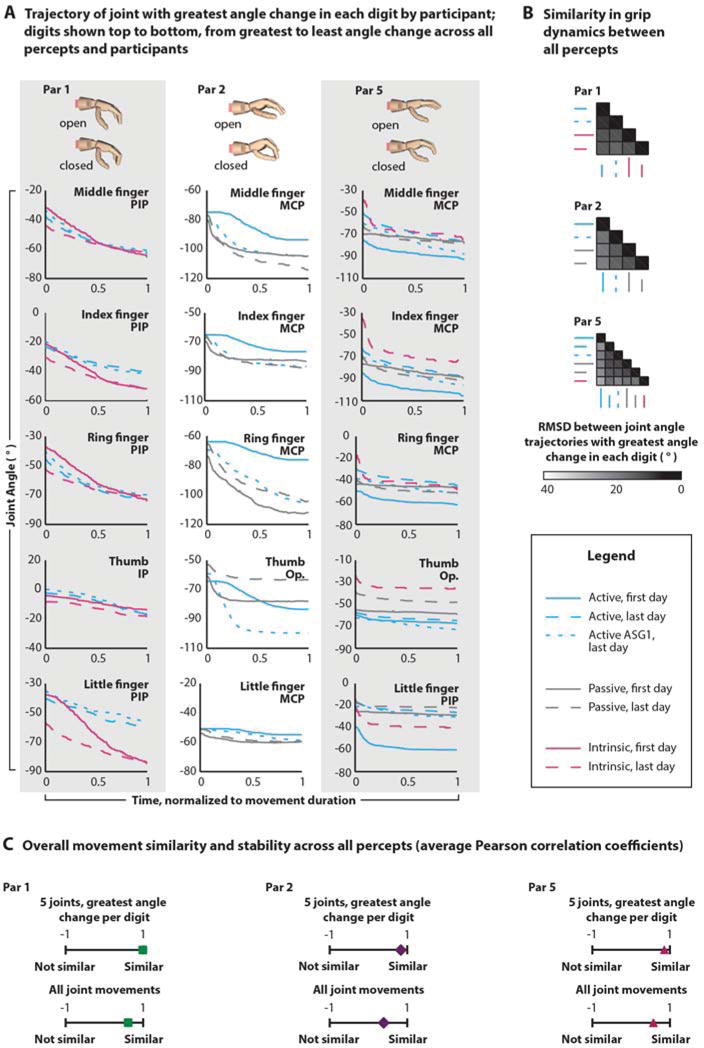
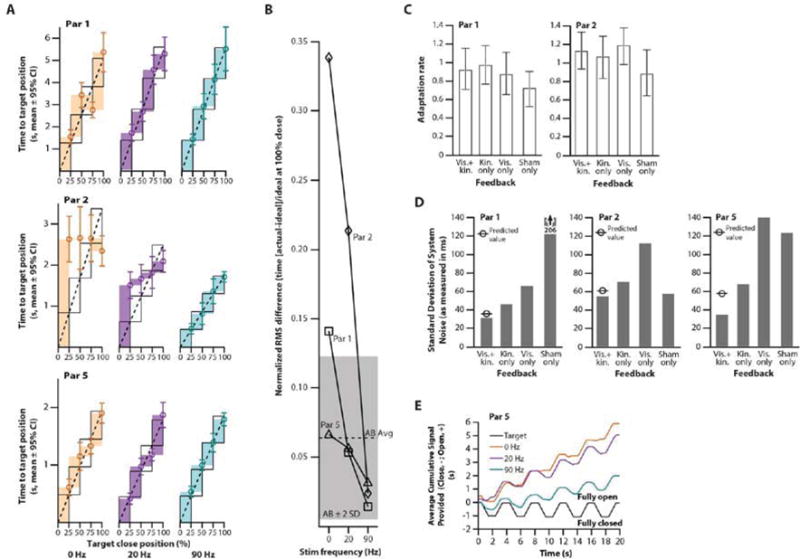
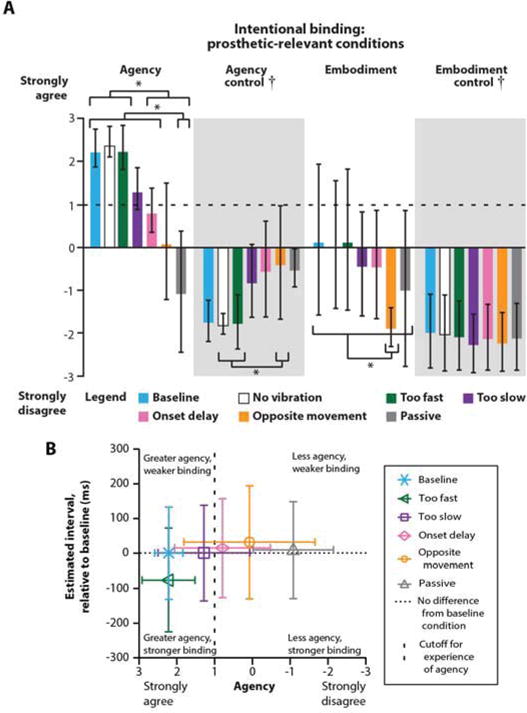
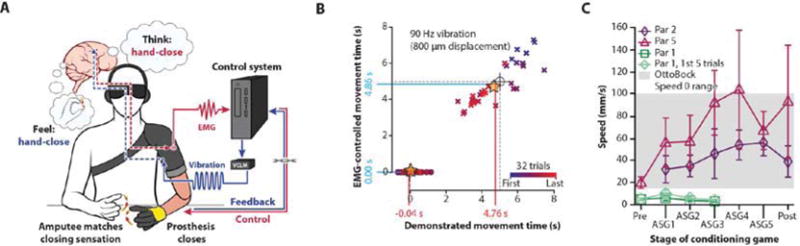
To effortlessly complete an intentional movement, the brain needs feedback from the body regarding the movement's progress. This largely nonconscious kinesthetic sense helps the brain to learn relationships between motor commands and outcomes to correct movement errors. Prosthetic systems for restoring function have predominantly focused on controlling motorized joint movement. Without the kinesthetic sense, however, these devices do not become intuitively controllable. We report a method for endowing human amputees with a kinesthetic perception of dexterous robotic hands. Vibrating the muscles used for prosthetic control via a neural-machine interface produced the illusory perception of complex grip movements. Within minutes, three amputees integrated this kinesthetic feedback and improved movement control. Combining intent, kinesthesia, and vision instilled participants with a sense of agency over the robotic movements. This feedback approach for closed-loop control opens a pathway to seamless integration of minds and machines.
Copyright © 2018 The Authors, some rights reserved; exclusive licensee American Association for the Advancement of Science. No claim to original U.S. Government Works.
Conflict of interest statement
Figures
References
-
- Wolpert DM, Ghahramani Z, Jordan MI. An internal model for sensorimotor integration. Science. 1995;269:1880–1882. - PubMed
-
- Bongers RM, Kyberd PJ, Bouwsema H, Kenney LPJ, Plettenburg DH, Van Der Sluis CK. Bernstein’s levels of construction of movements applied to upper limb prosthetics. J Prosthet Orthot. 2012;24:67–76.
-
- Fraser C, Wing AW. A case study of reaching by a user of a manually-operated artificial hand. Prosthet Orthot Int. 1981;5:151–156. - PubMed
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources
