

Recent Progress in Technologies for Tactile Sensors
- PMID: 29565835
- PMCID: PMC5948515
- DOI: 10.3390/s18040948
Recent Progress in Technologies for Tactile Sensors
Abstract
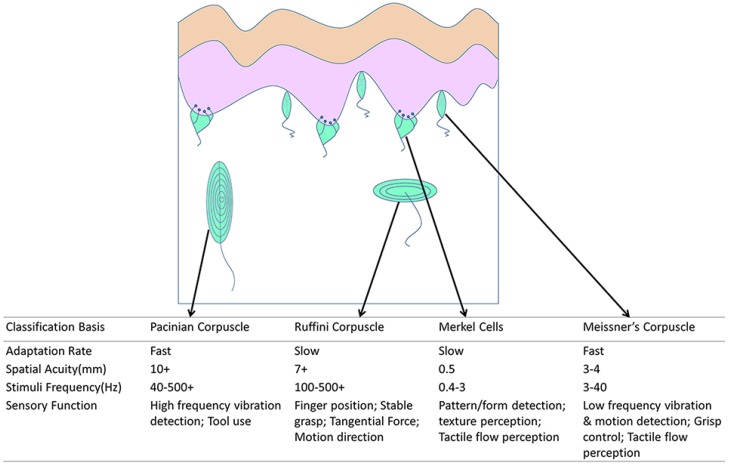
Over the last two decades, considerable scientific and technological efforts have been devoted to developing tactile sensing based on a variety of transducing mechanisms, with prospective applications in many fields such as human-machine interaction, intelligent robot tactile control and feedback, and tactile sensorized minimally invasive surgery. This paper starts with an introduction of human tactile systems, followed by a presentation of the basic demands of tactile sensors. State-of-the-art tactile sensors are reviewed in terms of their diverse sensing mechanisms, design consideration, and material selection. Subsequently, typical performances of the sensors, along with their advantages and disadvantages, are compared and analyzed. Two major potential applications of tactile sensing systems are discussed in detail. Lastly, we propose prospective research directions and market trends of tactile sensing systems.
Keywords: MIS; humanoid robot; tactile sensor; technologies progress review.
Conflict of interest statement
The authors declare no conflict of interest.
Figures
References
-
- Girão P.S., Ramos P.M.P., Postolache O., Pereira J.M.D. Tactile sensors for robotic applications. Measurement. 2013;46:1257–1271. doi: 10.1016/j.measurement.2012.11.015. - DOI
-
- Hu X., Zhang X., Liu M., Chen Y., Li P., Pei W., Zhang C., Chen H. A flexible capacitive tactile sensor array with micro structure for robotic application. Sci. China Inf. Sci. 2014;57:1–6. doi: 10.1007/s11432-014-5191-8. - DOI
-
- Fritzsche M., Elkmann N., Schulenburg E. Tactile sensing: A key technology for safe physical human robot interaction; Proceedings of the 6th International Conference on Human-Robot Interaction; Lausanne, Switzerland. 6–9 March 2011; pp. 139–140.
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
Other Literature Sources
