

Planning and navigation as active inference
- PMID: 29572721
- PMCID: PMC6060791
- DOI: 10.1007/s00422-018-0753-2
Planning and navigation as active inference
Abstract
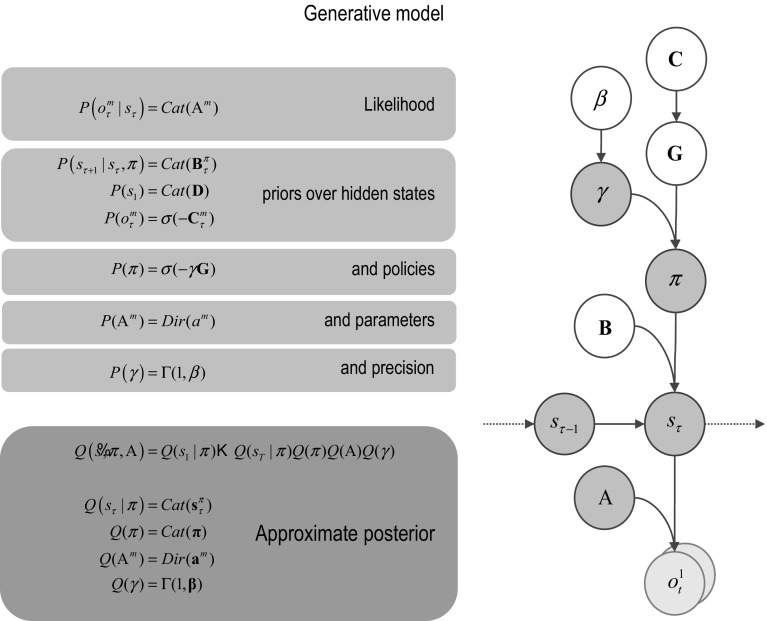
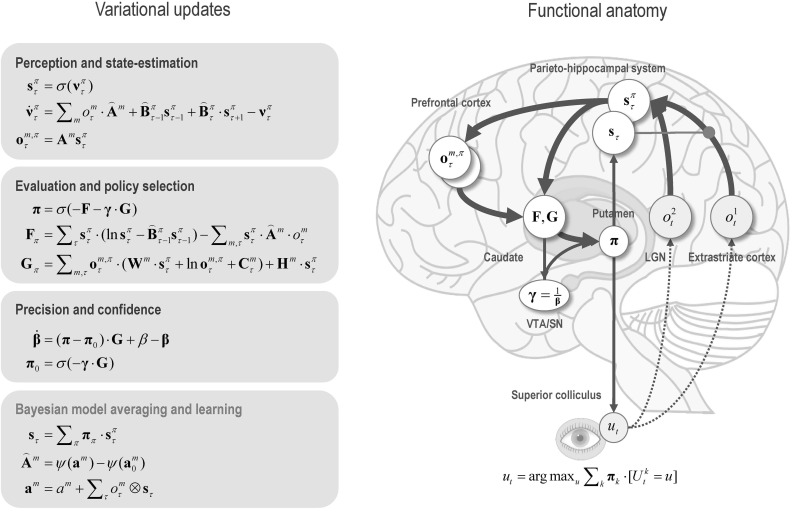
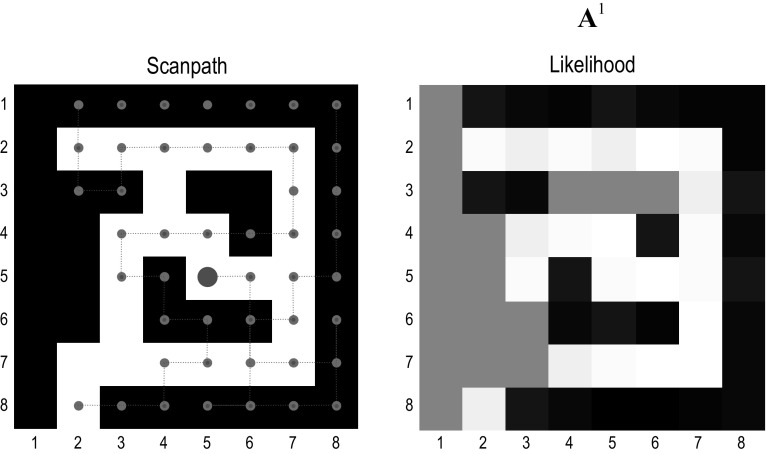
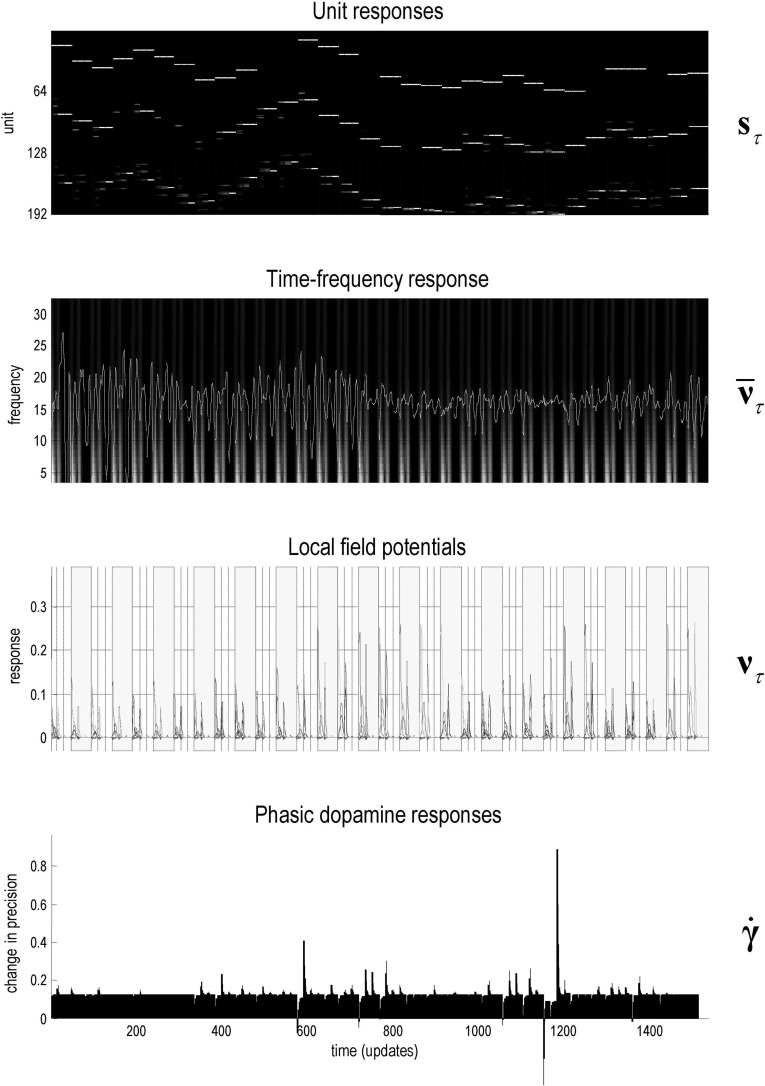
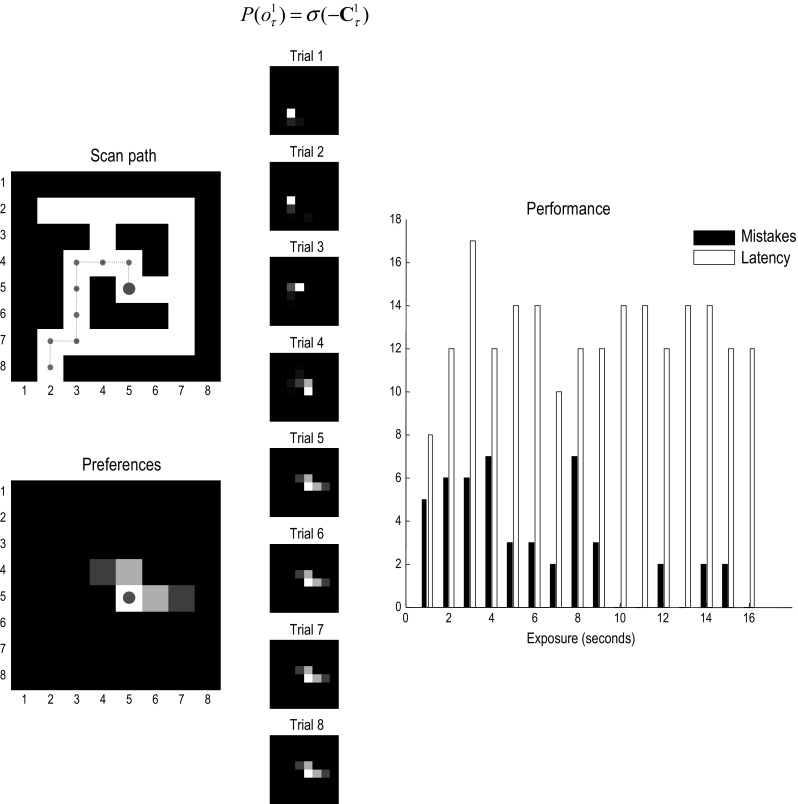
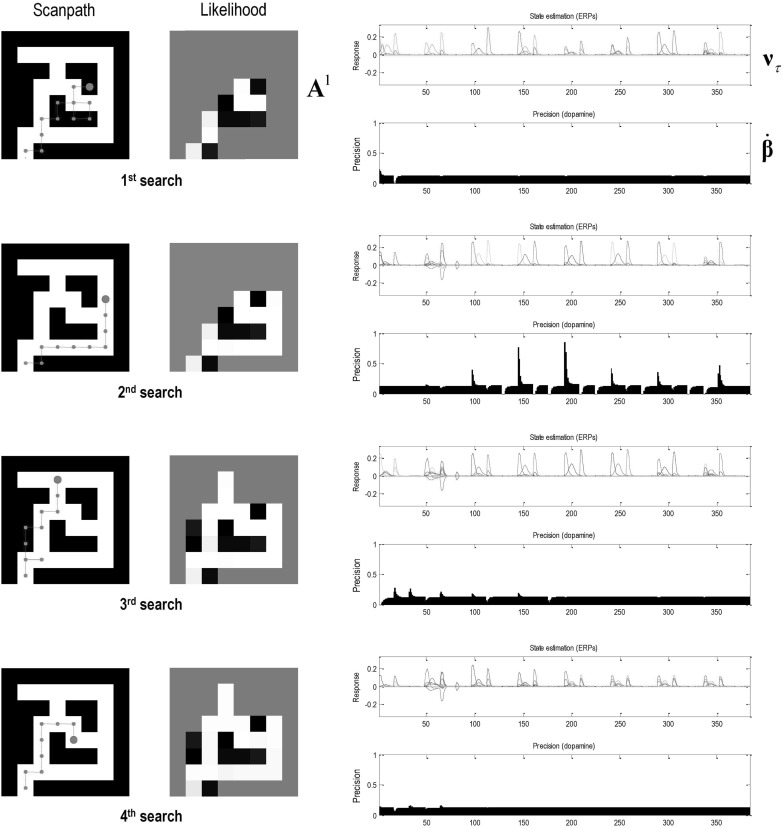
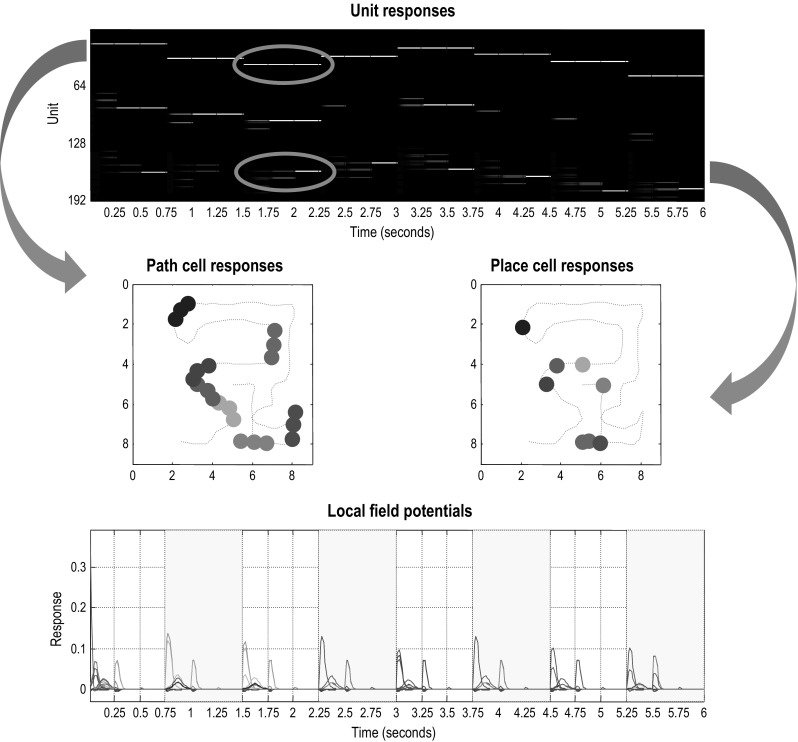
This paper introduces an active inference formulation of planning and navigation. It illustrates how the exploitation-exploration dilemma is dissolved by acting to minimise uncertainty (i.e. expected surprise or free energy). We use simulations of a maze problem to illustrate how agents can solve quite complicated problems using context sensitive prior preferences to form subgoals. Our focus is on how epistemic behaviour-driven by novelty and the imperative to reduce uncertainty about the world-contextualises pragmatic or goal-directed behaviour. Using simulations, we illustrate the underlying process theory with synthetic behavioural and electrophysiological responses during exploration of a maze and subsequent navigation to a target location. An interesting phenomenon that emerged from the simulations was a putative distinction between 'place cells'-that fire when a subgoal is reached-and 'path cells'-that fire until a subgoal is reached.
Keywords: Active inference; Bayesian; Curiosity; Epistemic value; Exploitation; Exploration; Free energy; Novelty; Salience.
Conflict of interest statement
The authors have no disclosures or conflict of interest.
Figures
References
-
- Attias H (2003) Planning by probabilistic inference. Proc. of the 9th Int. Workshop on Artificial Intelligence and Statistics
-
- Barlow H. Possible principles underlying the transformations of sensory messages. In: Rosenblith W, editor. Sensory communication. Cambridge: MIT Press; 1961. pp. 217–234.
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources
