

Quantifying the three-dimensional facial morphology of the laboratory rat with a focus on the vibrissae
- PMID: 29621356
- PMCID: PMC5886528
- DOI: 10.1371/journal.pone.0194981
Quantifying the three-dimensional facial morphology of the laboratory rat with a focus on the vibrissae
Erratum in
-
Correction: Quantifying the three-dimensional facial morphology of the laboratory rat with a focus on the vibrissae.PLoS One. 2024 Jul 18;19(7):e0307612. doi: 10.1371/journal.pone.0307612. eCollection 2024. PLoS One. 2024. PMID: 39024222 Free PMC article.
Abstract
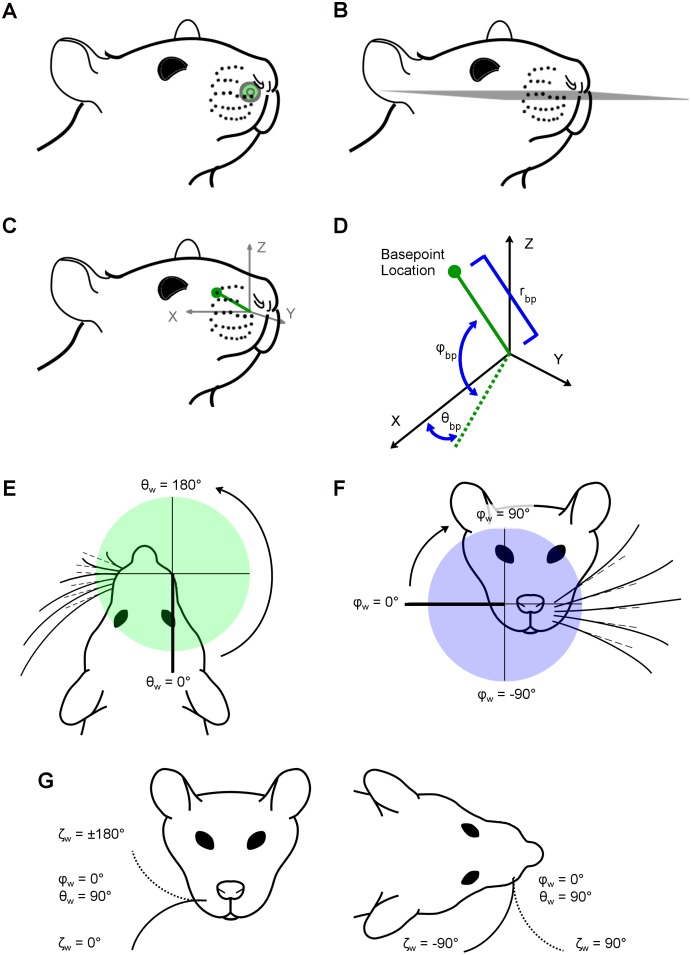
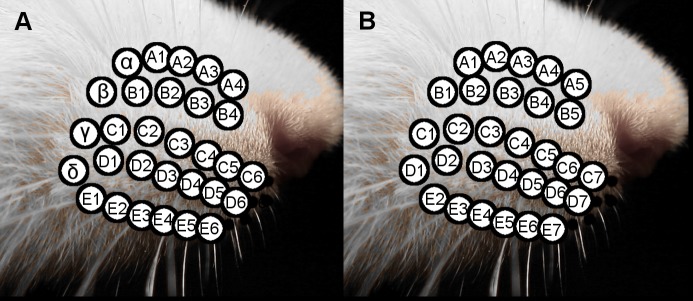
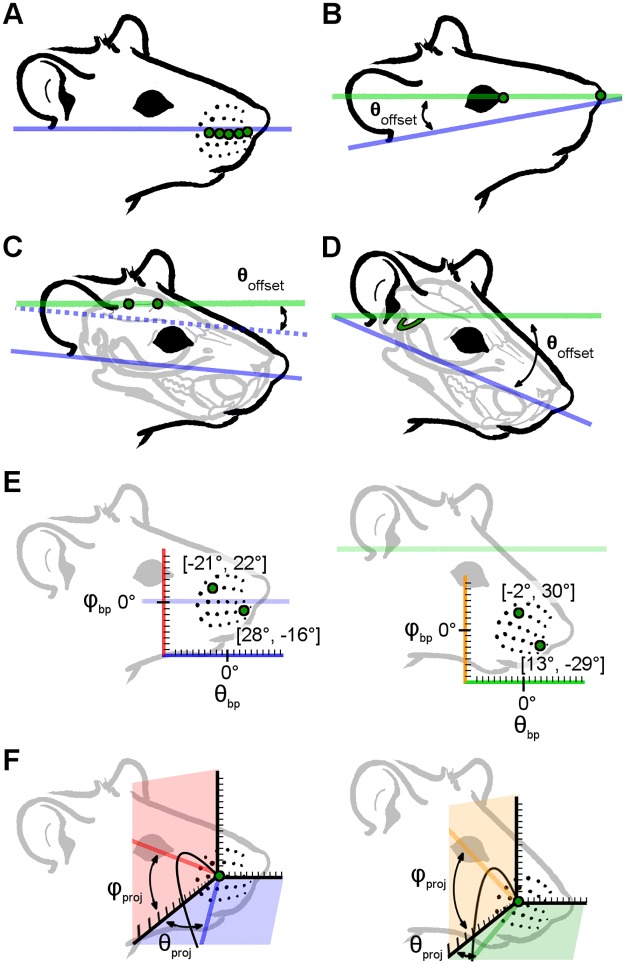
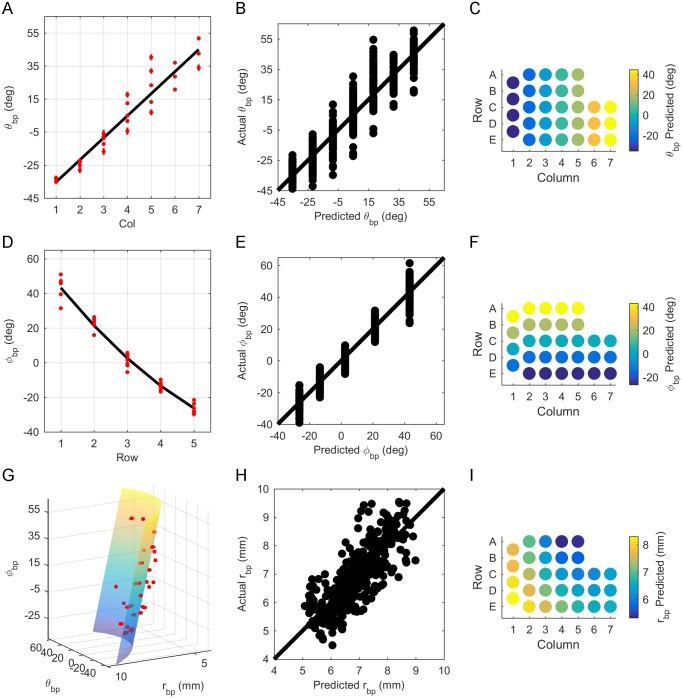
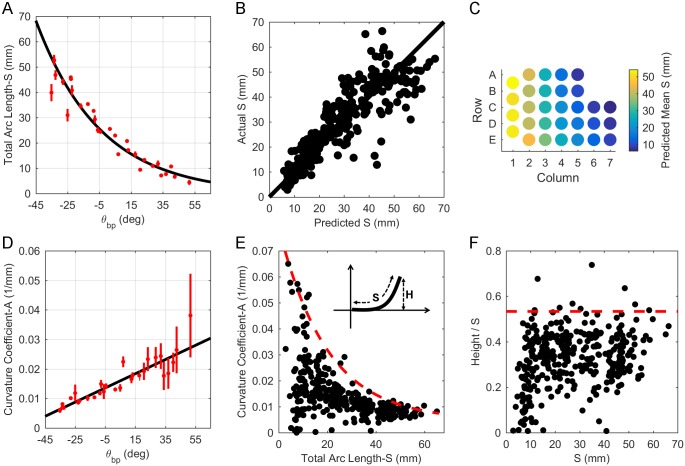
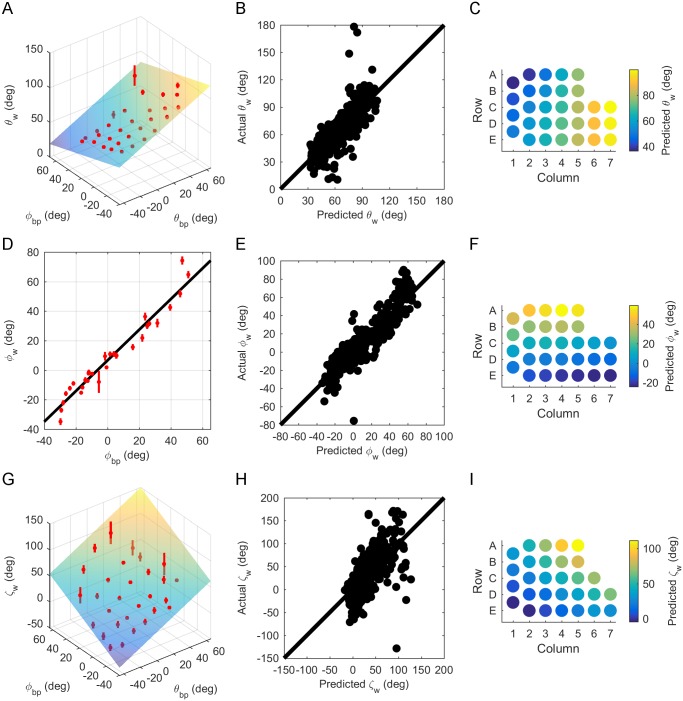
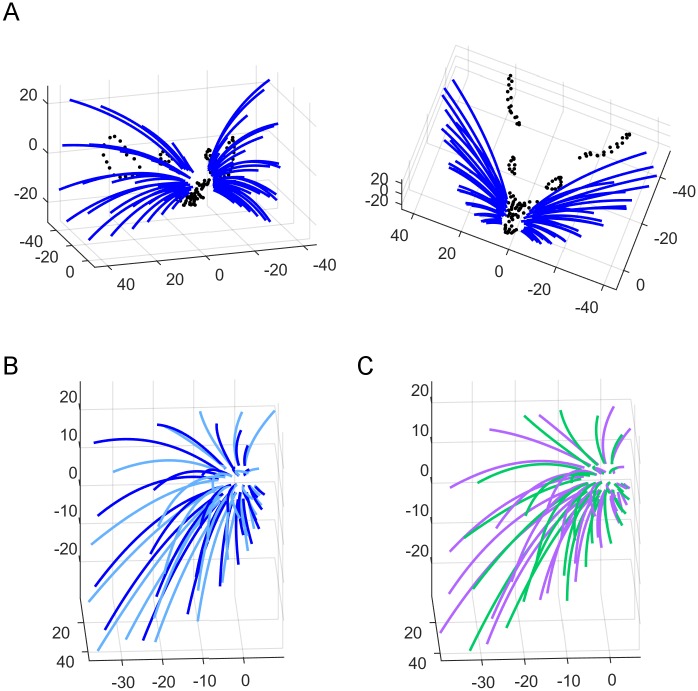
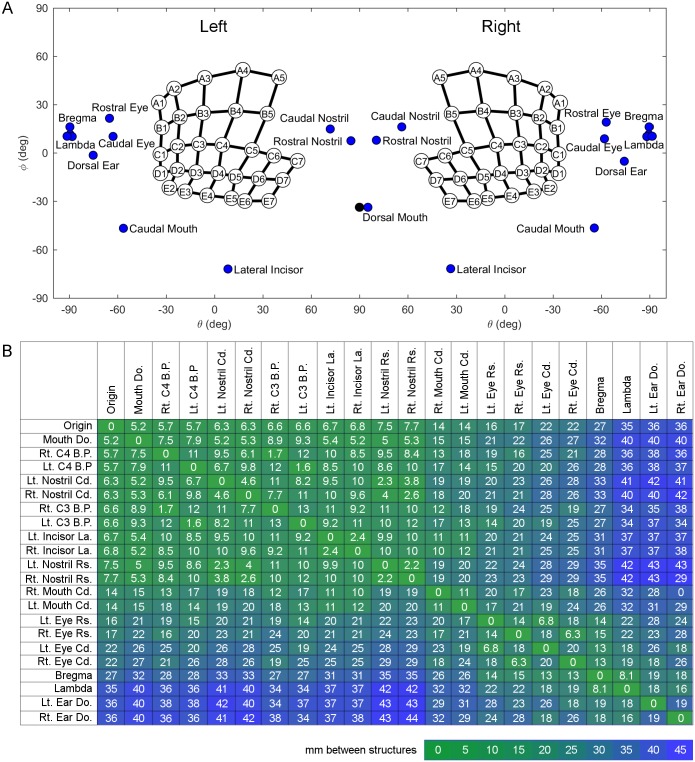
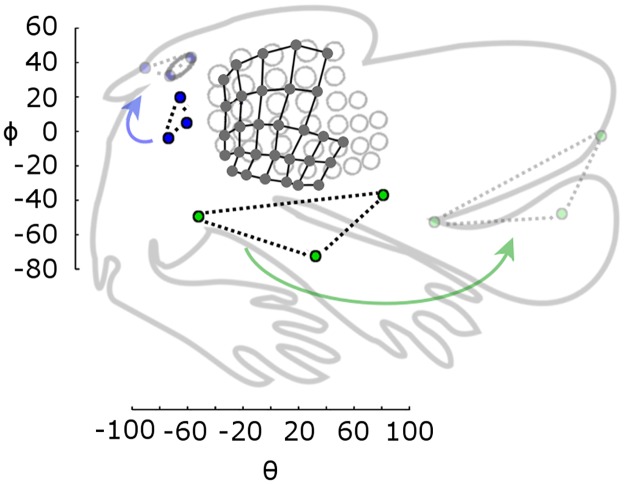
The morphology of an animal's face will have large effects on the sensory information it can acquire. Here we quantify the arrangement of cranial sensory structures of the rat, with special emphasis on the mystacial vibrissae (whiskers). Nearly all mammals have vibrissae, which are generally arranged in rows and columns across the face. The vibrissae serve a wide variety of important behavioral functions, including navigation, climbing, wake following, anemotaxis, and social interactions. To date, however, there are few studies that compare the morphology of vibrissal arrays across species, or that describe the arrangement of the vibrissae relative to other facial sensory structures. The few studies that do exist have exploited the whiskers' grid-like arrangement to quantify array morphology in terms of row and column identity. However, relying on whisker identity poses a challenge for comparative research because different species have different numbers and arrangements of whiskers. The present work introduces an approach to quantify vibrissal array morphology regardless of the number of rows and columns, and to quantify the array's location relative to other sensory structures. We use the three-dimensional locations of the whisker basepoints as fundamental parameters to generate equations describing the length, curvature, and orientation of each whisker. Results show that in the rat, whisker length varies exponentially across the array, and that a hard limit on intrinsic curvature constrains the whisker height-to-length ratio. Whiskers are oriented to "fan out" approximately equally in dorsal-ventral and rostral-caudal directions. Quantifying positions of the other sensory structures relative to the whisker basepoints shows remarkable alignment to the somatosensory cortical homunculus, an alignment that would not occur for other choices of coordinate systems (e.g., centered on the midpoint of the eyes). We anticipate that the quantification of facial sensory structures, including the vibrissae, will ultimately enable cross-species comparisons of multi-modal sensing volumes.
Conflict of interest statement
Figures
References
-
- Koka K, Jones HG, Thornton JL, Lupo JE, Tollin DJ. Sound pressure transformations by the head and pinnae of the adult chinchilla (Chinchilla lanigera). Hear Res. 2011; 272(1–2): 135–147. doi: 10.1016/j.heares.2010.10.007 - DOI - PMC - PubMed
-
- Burton RF. A new look at the scaling of size in mammalian eyes. Journal of Zoology. 2006; 269(2): 225–232.
-
- Green DG, Powers MK, Banks MS. Depth of focus, eye size and visual acuity. Vision Research. 1980; 20: 827–835. - PubMed
-
- Kiltie RA. Scaling of visual acuity with body size in mammals and birds. Functional Ecology. 2000; 14(2): 226–234.
-
- Rajan R, Clement JP, Bhalla US. Rats smell in stereo. Science. 2006; 311(5761): 666–670. doi: 10.1126/science.1122096 - DOI - PubMed
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources
