

Spatial Encoding of Translational Optic Flow in Planar Scenes by Elementary Motion Detector Arrays
- PMID: 29643402
- PMCID: PMC5895815
- DOI: 10.1038/s41598-018-24162-z
Spatial Encoding of Translational Optic Flow in Planar Scenes by Elementary Motion Detector Arrays
Abstract
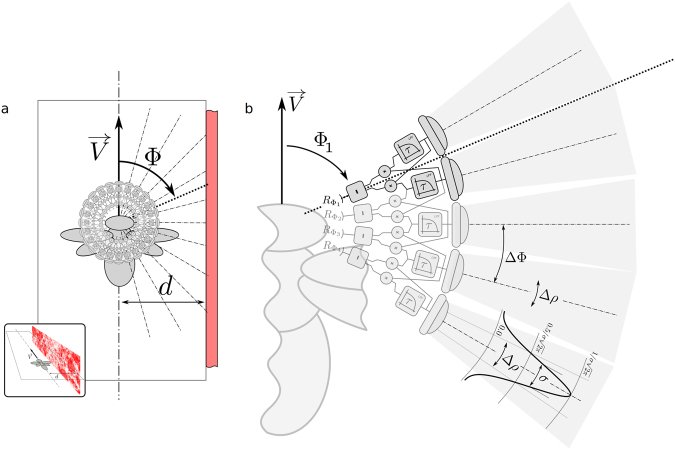
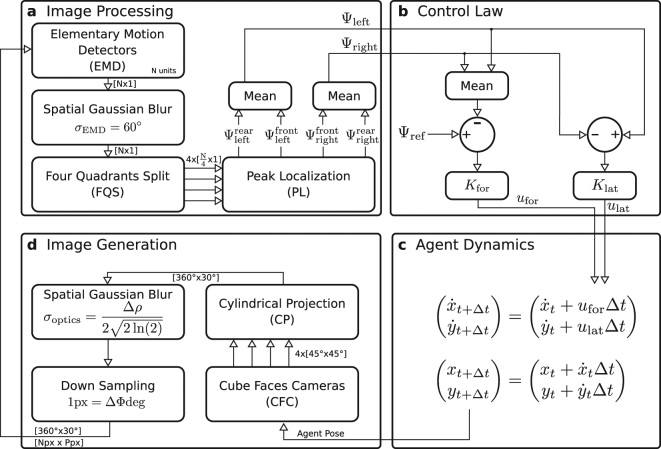
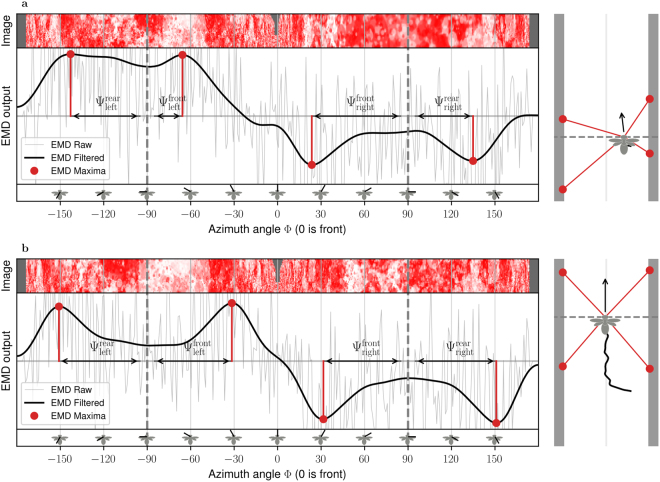
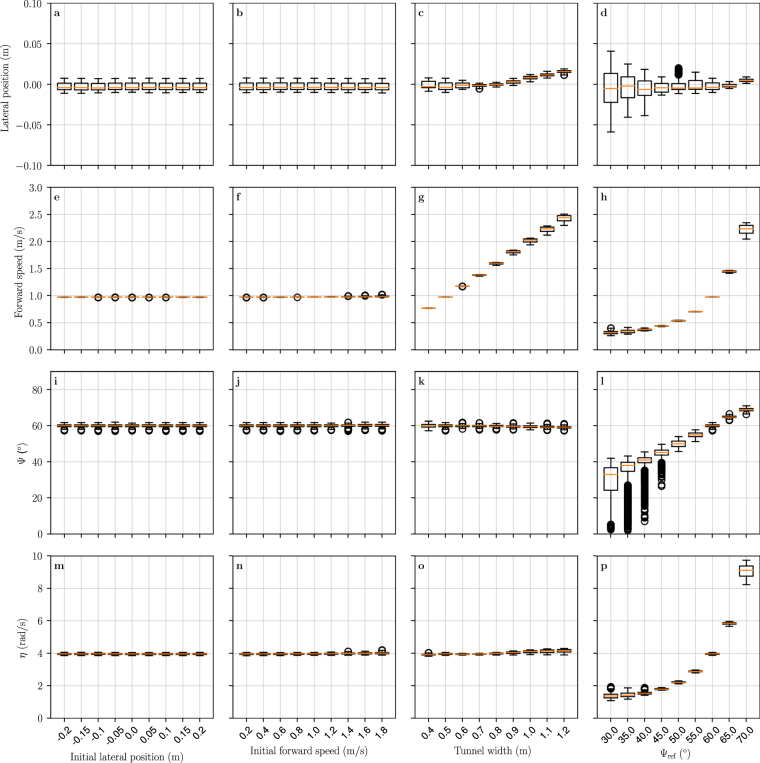
Elementary Motion Detectors (EMD) are well-established models of visual motion estimation in insects. The response of EMDs are tuned to specific temporal and spatial frequencies of the input stimuli, which matches the behavioural response of insects to wide-field image rotation, called the optomotor response. However, other behaviours, such as speed and position control, cannot be fully accounted for by EMDs because these behaviours are largely unaffected by image properties and appear to be controlled by the ratio between the flight speed and the distance to an object, defined here as relative nearness. We present a method that resolves this inconsistency by extracting an unambiguous estimate of relative nearness from the output of an EMD array. Our method is suitable for estimation of relative nearness in planar scenes such as when flying above the ground or beside large flat objects. We demonstrate closed loop control of the lateral position and forward velocity of a simulated agent flying in a corridor. This finding may explain how insects can measure relative nearness and control their flight despite the frequency tuning of EMDs. Our method also provides engineers with a relative nearness estimation technique that benefits from the low computational cost of EMDs.
Conflict of interest statement
The authors declare no competing interests.
Figures
References
-
- Gibson JJ. The perception of the visual world. Psychological Bulletin. 1950;48:1–259.
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
Other Literature Sources
Molecular Biology Databases
