

Real-time magnetic actuation of DNA nanodevices via modular integration with stiff micro-levers
- PMID: 29654315
- PMCID: PMC5899095
- DOI: 10.1038/s41467-018-03601-5
Real-time magnetic actuation of DNA nanodevices via modular integration with stiff micro-levers
Abstract
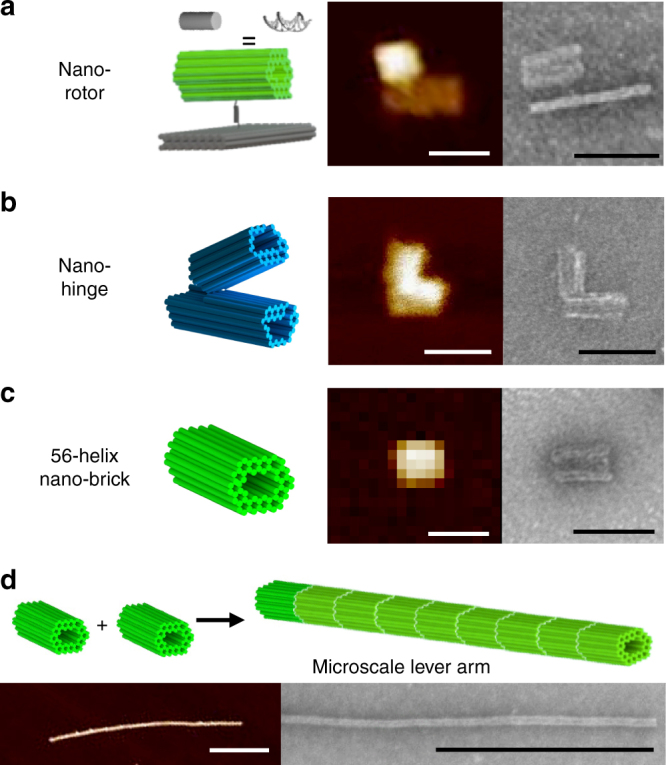
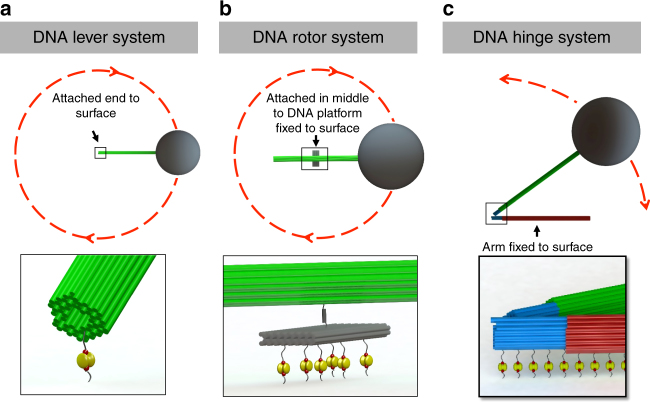
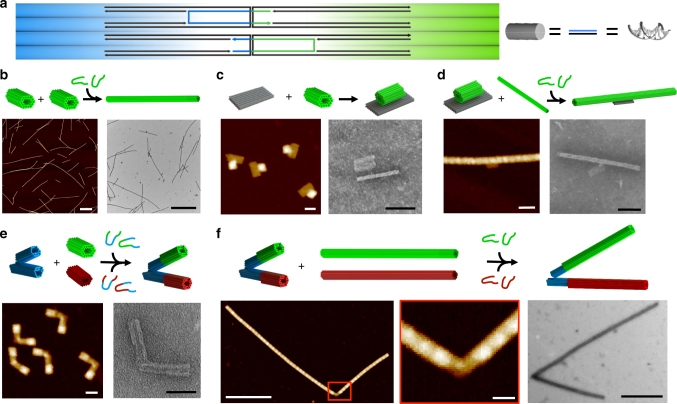
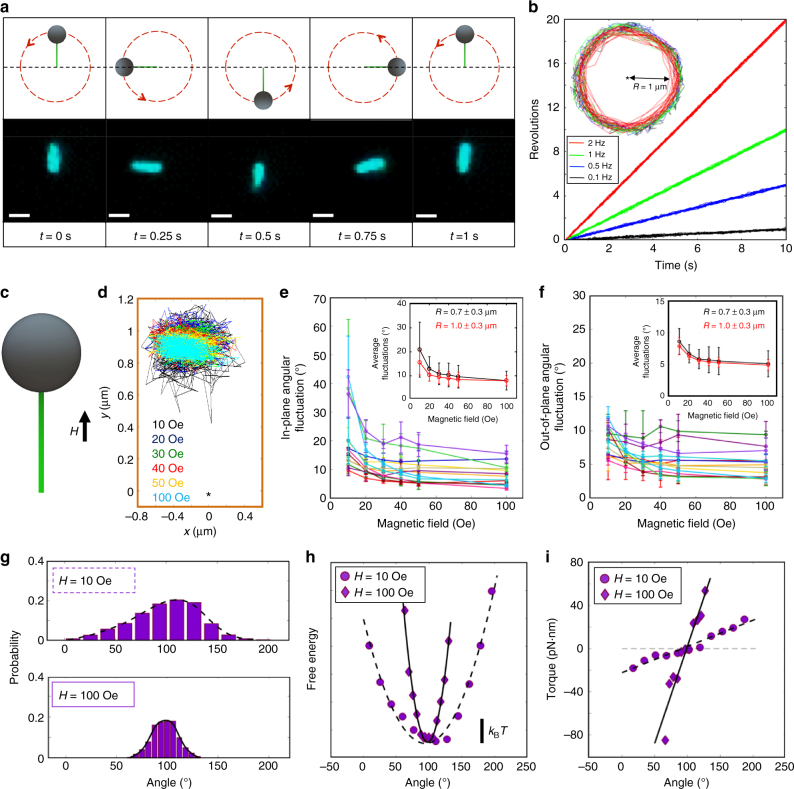
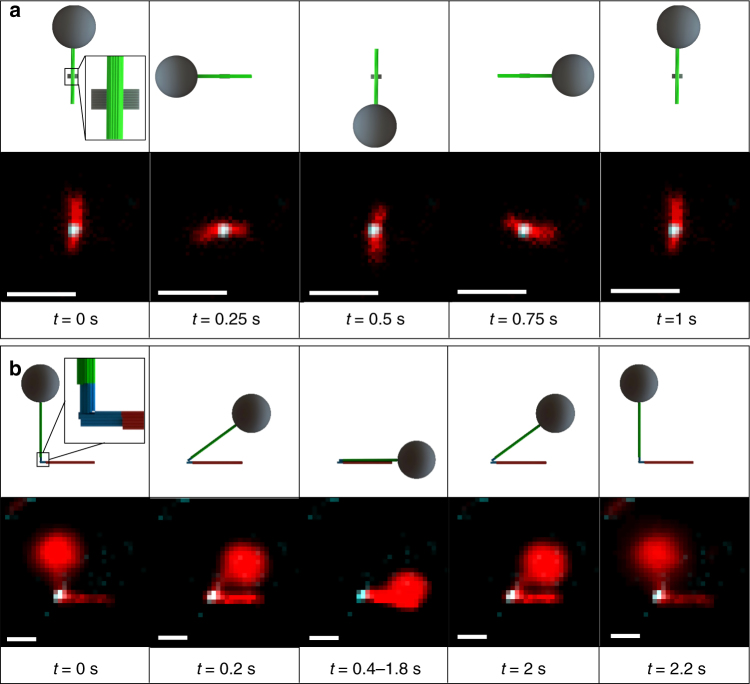
DNA nanotechnology has enabled complex nanodevices, but the ability to directly manipulate systems with fast response times remains a key challenge. Current methods of actuation are relatively slow and only direct devices into one or two target configurations. Here we report an approach to control DNA origami assemblies via externally applied magnetic fields using a low-cost platform that enables actuation into many distinct configurations with sub-second response times. The nanodevices in these assemblies are manipulated via mechanically stiff micron-scale lever arms, which rigidly couple movement of a micron size magnetic bead to reconfiguration of the nanodevice while also enabling direct visualization of the conformation. We demonstrate control of three assemblies-a rod, rotor, and hinge-at frequencies up to several Hz and the ability to actuate into many conformations. This level of spatiotemporal control over DNA devices can serve as a foundation for real-time manipulation of molecular and atomic systems.
Conflict of interest statement
The authors declare no competing interests.
Figures
Similar articles
-
Cation-Activated Avidity for Rapid Reconfiguration of DNA Nanodevices.ACS Nano. 2018 Sep 25;12(9):9484-9494. doi: 10.1021/acsnano.8b04817. Epub 2018 Sep 4. ACS Nano. 2018. PMID: 30169013
-
Nanomechanical molecular devices made of DNA origami.Acc Chem Res. 2014 Jun 17;47(6):1742-9. doi: 10.1021/ar400328v. Epub 2014 Apr 29. Acc Chem Res. 2014. PMID: 24772996
-
Steric Communication between Dynamic Components on DNA Nanodevices.ACS Nano. 2023 May 9;17(9):8271-8280. doi: 10.1021/acsnano.2c12455. Epub 2023 Apr 18. ACS Nano. 2023. PMID: 37072126 Free PMC article.
-
Recent progress in DNA origami technology.Curr Protoc Nucleic Acid Chem. 2011 Jun;Chapter 12:Unit12.8. doi: 10.1002/0471142700.nc1208s45. Curr Protoc Nucleic Acid Chem. 2011. PMID: 21638269 Review.
-
DNA origami: the art of folding DNA.Angew Chem Int Ed Engl. 2012 Jan 2;51(1):58-66. doi: 10.1002/anie.201105846. Epub 2011 Dec 7. Angew Chem Int Ed Engl. 2012. PMID: 22162047 Review.
Cited by
-
DNA-Based Molecular Machines.JACS Au. 2022 Oct 21;2(11):2381-2399. doi: 10.1021/jacsau.2c00292. eCollection 2022 Nov 28. JACS Au. 2022. PMID: 36465542 Free PMC article. Review.
-
A Magnetosome-Based Platform for Flow Biocatalysis.ACS Appl Mater Interfaces. 2022 May 18;14(19):22138-22150. doi: 10.1021/acsami.2c03337. Epub 2022 May 4. ACS Appl Mater Interfaces. 2022. PMID: 35508355 Free PMC article.
-
Dynamic DNA Origami Devices: from Strand-Displacement Reactions to External-Stimuli Responsive Systems.Int J Mol Sci. 2018 Jul 20;19(7):2114. doi: 10.3390/ijms19072114. Int J Mol Sci. 2018. PMID: 30037005 Free PMC article. Review.
-
Nucleic acid nanostructures for in vivo applications: The influence of morphology on biological fate.Appl Phys Rev. 2023 Mar;10(1):011304. doi: 10.1063/5.0121820. Appl Phys Rev. 2023. PMID: 36874908 Free PMC article. Review.
-
DNA-based programmable gate arrays for general-purpose DNA computing.Nature. 2023 Oct;622(7982):292-300. doi: 10.1038/s41586-023-06484-9. Epub 2023 Sep 13. Nature. 2023. PMID: 37704731
References
Publication types
MeSH terms
Substances
LinkOut - more resources
Full Text Sources
Other Literature Sources
