

Kinematic patterns while walking on a slope at different speeds
- PMID: 29698109
- PMCID: PMC6842866
- DOI: 10.1152/japplphysiol.01020.2017
Kinematic patterns while walking on a slope at different speeds
Abstract
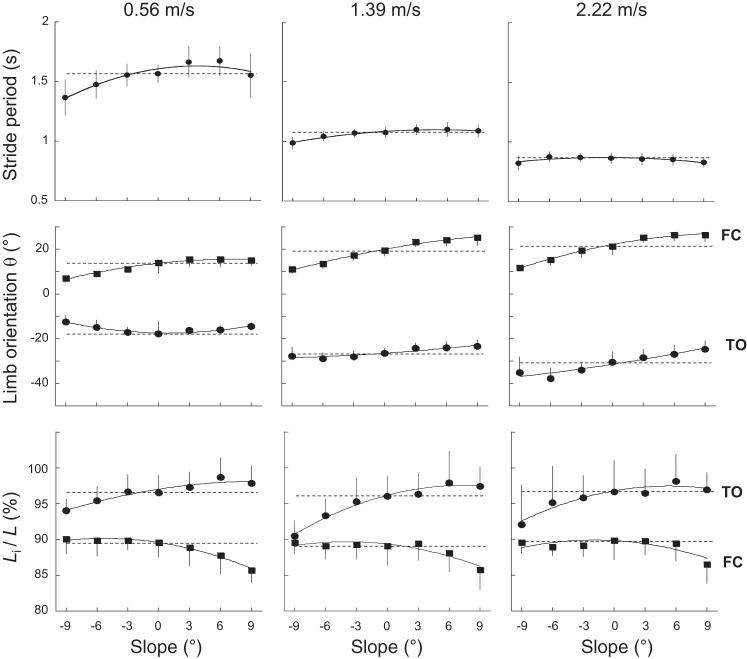
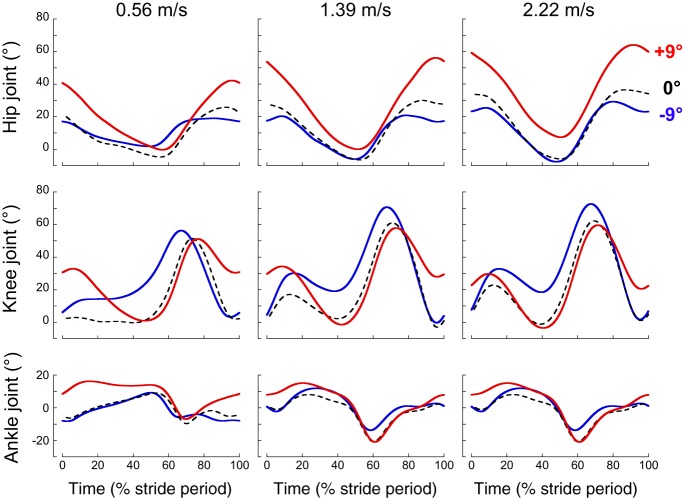
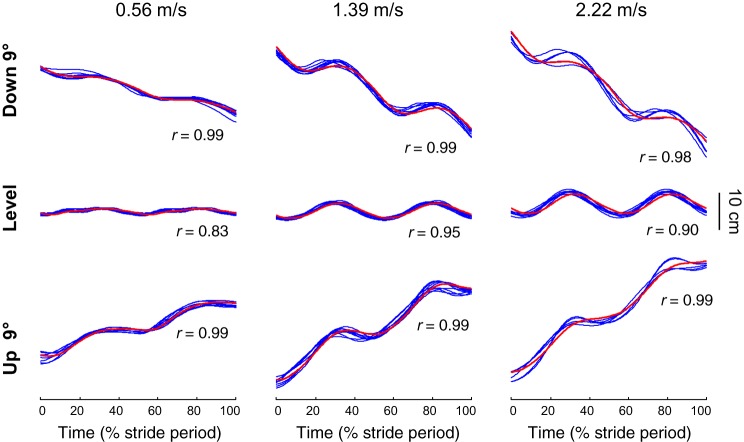
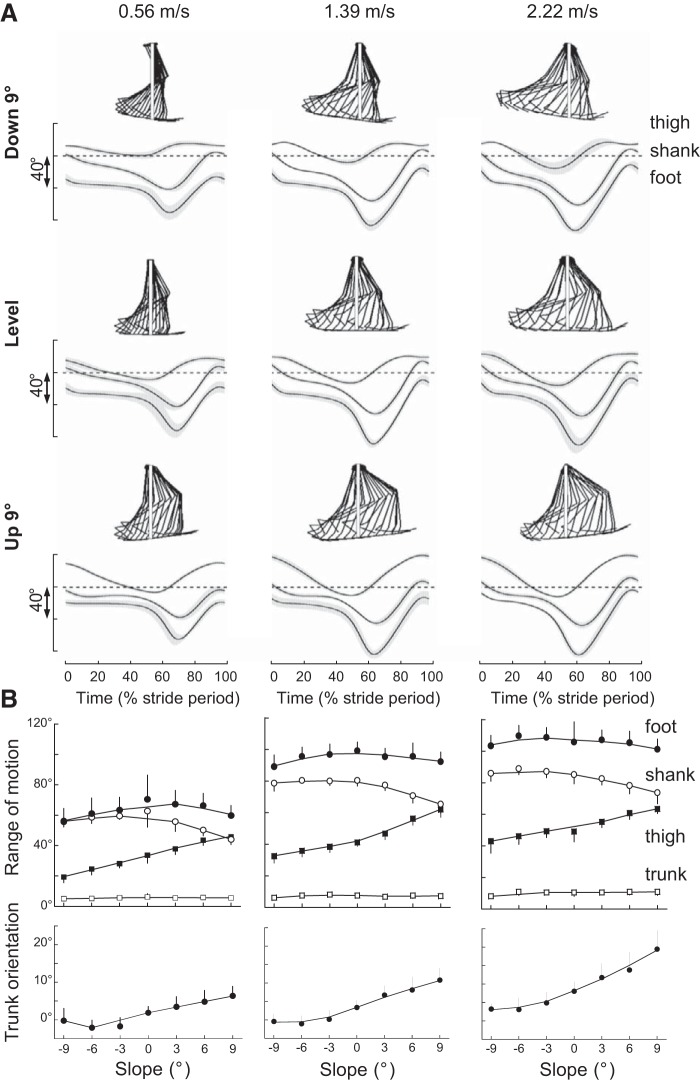
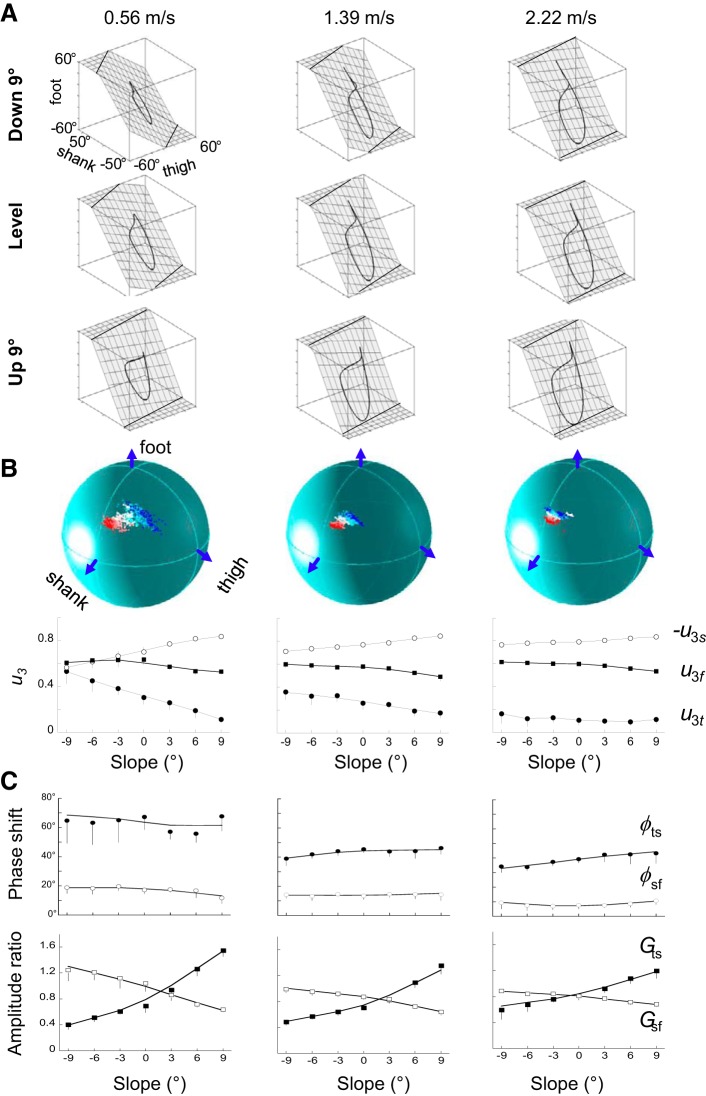
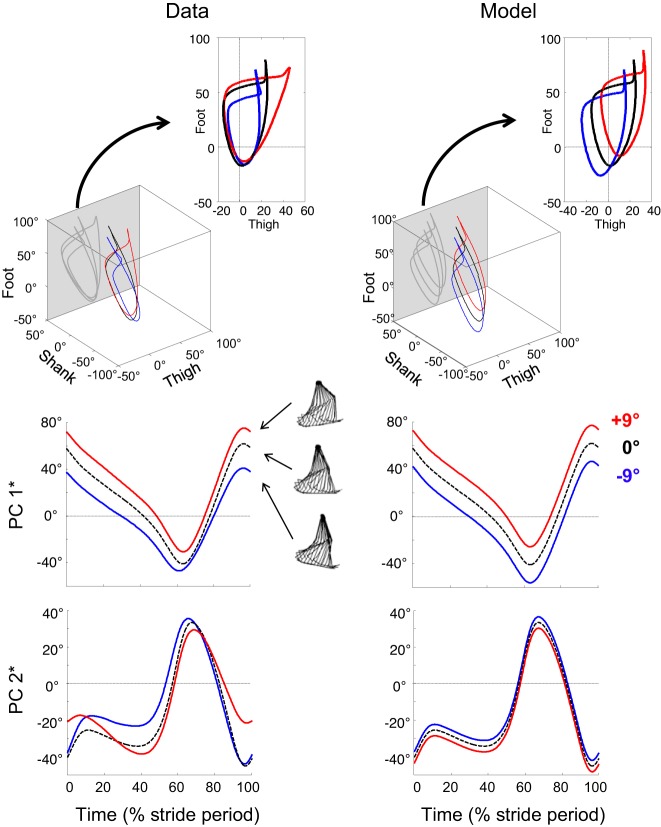
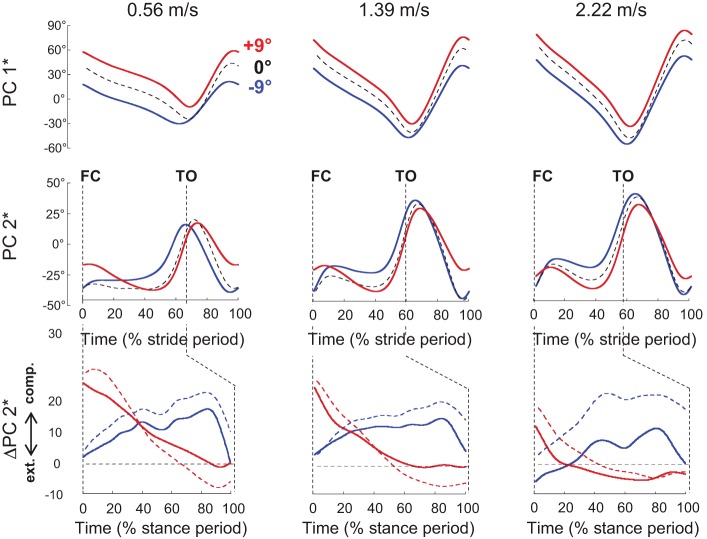
During walking, the elevation angles of the thigh, shank, and foot (i.e., the angle between the segment and the vertical) covary along a characteristic loop constrained on a plane. Here, we investigate how the shape of the loop and the orientation of the plane, which reflect the intersegmental coordination, change with the slope of the terrain and the speed of progression. Ten subjects walked on an inclined treadmill at different slopes (between -9° and +9°) and speeds (from 0.56 to 2.22 m/s). A principal component analysis was performed on the covariance matrix of the thigh, shank, and foot elevation angles. At each slope and speed, the variance accounted for by the two principal components was >99%, indicating that the planar covariation is maintained. The two principal components can be associated to the limb orientation (PC1*) and the limb length (PC2*). At low walking speeds, changes in the intersegmental coordination across slopes are characterized mainly by a change in the orientation of the covariation plane and in PC2* and to a lesser extent, by a change in PC1*. As speed increases, changes in the intersegmental coordination across slopes are more related to a change in PC1 *, with limited changes in the orientation of the plane and in PC 2*. Our results show that the kinematic patterns highly depend on both slope and speed. NEW & NOTEWORTHY In this paper, changes in the lower-limb intersegmental coordination during walking with slope and speed are linked to changes in the trajectory of the body center of mass. Modifications in the kinematic pattern with slope depend on speed: at slow speeds, the net vertical displacement of the body during each step is related to changes in limb length and orientation. When speed increases, the vertical displacement is mostly related to a change in limb orientation.
Keywords: intersegmental coordination; kinematics; planar covariation; slope; walking.
Conflict of interest statement
No conflicts of interest, financial or otherwise, are declared by the authors.
Figures
References
-
- Alexander RM. Human walking and running. J Biol Educ 18: 135–140, 1984. doi:10.1080/00219266.1984.9654619. - DOI
-
- Alexander RM. Tendon elasticity and positional control. Behav Brain Sci 18: 745, 1995. doi:10.1017/S0140525X00040711. - DOI
-
- Amirudin AN, Parasuraman S, Kadirvel A, Ahmed Khan MK, Elamvazuthi I. Biomechanics of hip, knee and ankle joint loading during ascent and descent walking. Proc Comp Sci 42: 336–344, 2014. doi:10.1016/j.procs.2014.11.071. - DOI
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources
Research Materials
Miscellaneous