

Population coding of conditional probability distributions in dorsal premotor cortex
- PMID: 29725023
- PMCID: PMC5934453
- DOI: 10.1038/s41467-018-04062-6
Population coding of conditional probability distributions in dorsal premotor cortex
Abstract
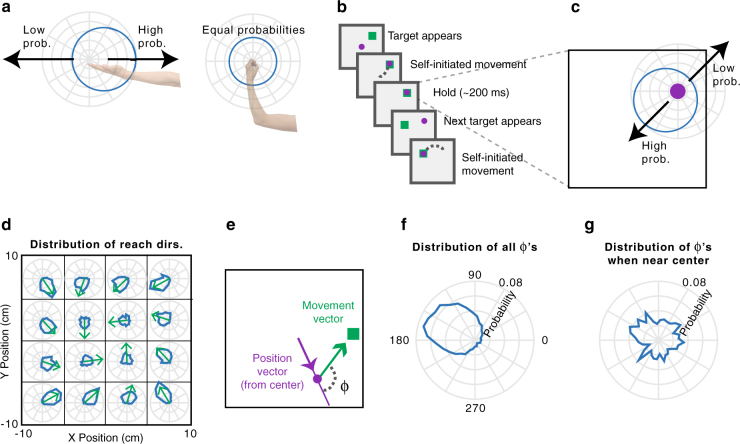
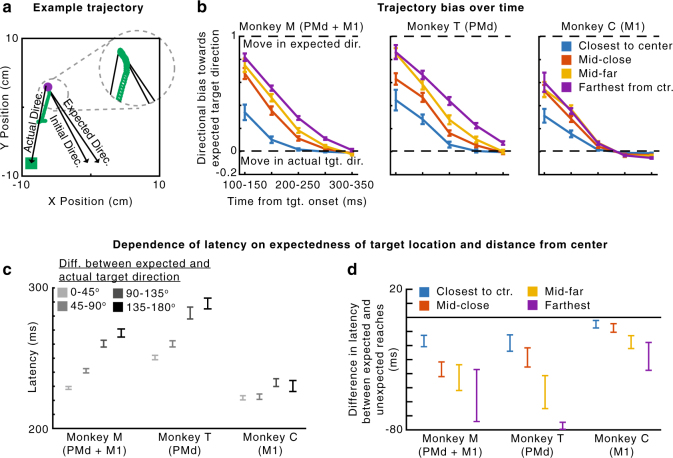
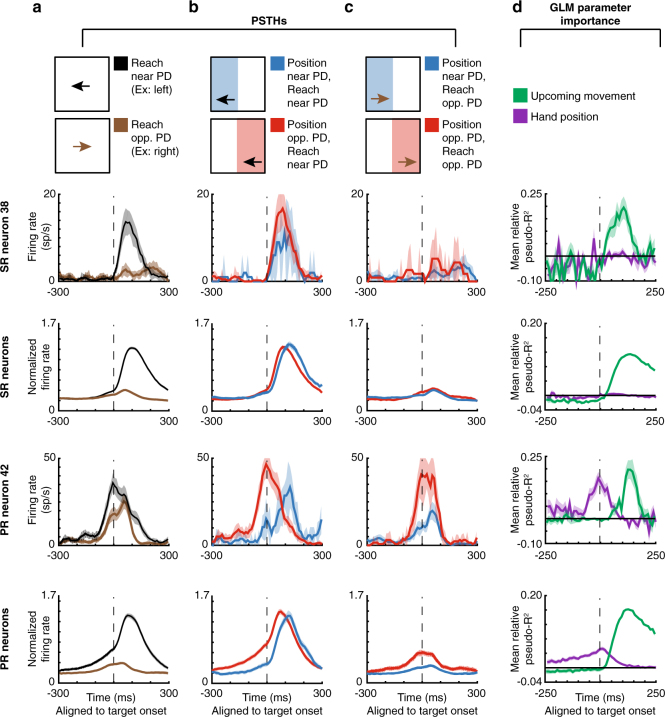
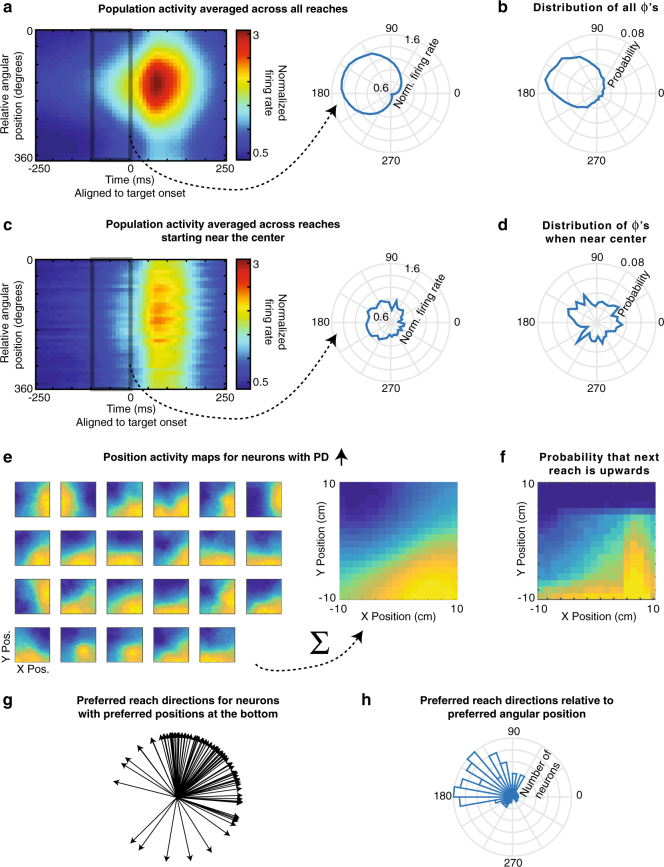
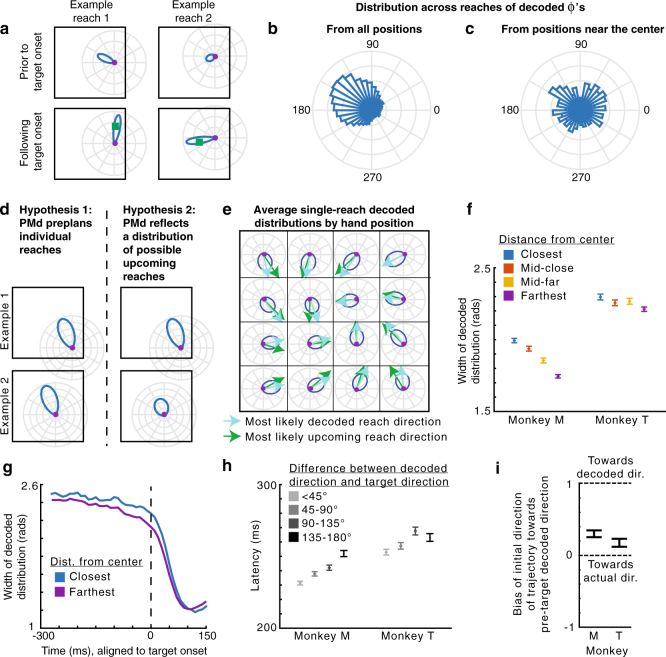
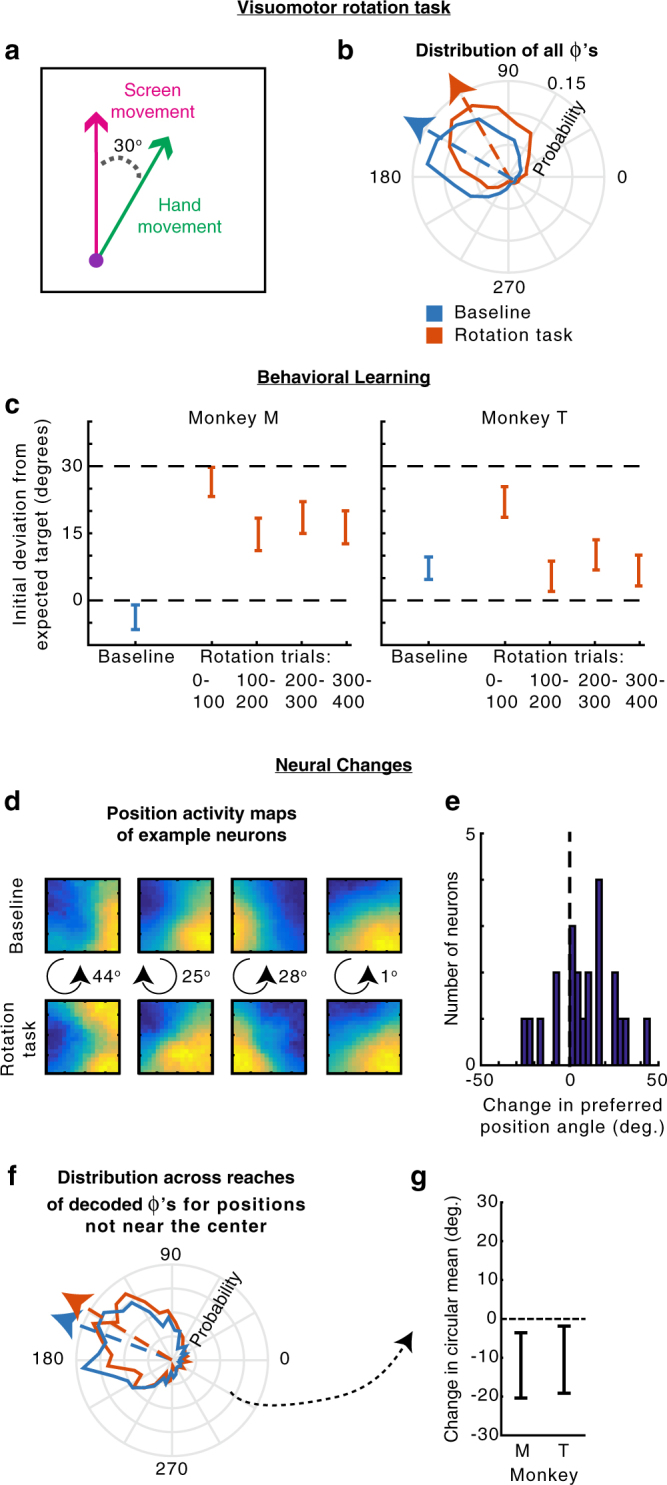
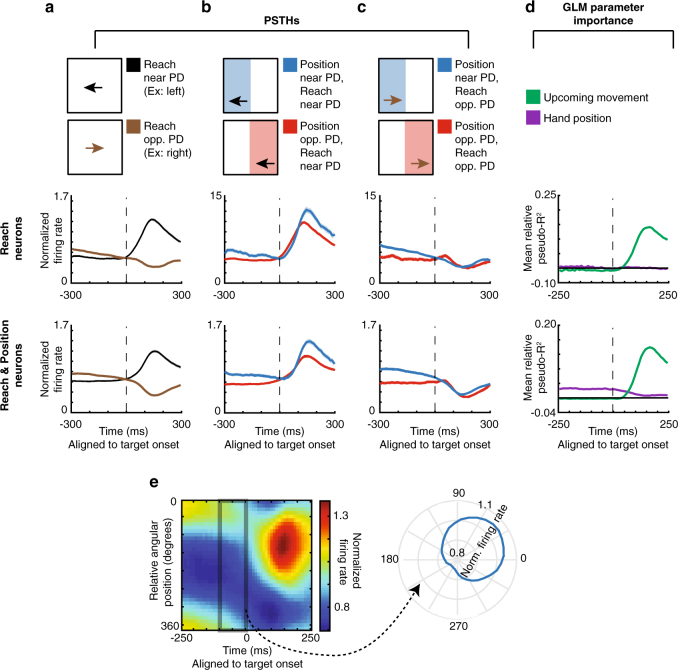
Our bodies and the environment constrain our movements. For example, when our arm is fully outstretched, we cannot extend it further. More generally, the distribution of possible movements is conditioned on the state of our bodies in the environment, which is constantly changing. However, little is known about how the brain represents such distributions, and uses them in movement planning. Here, we record from dorsal premotor cortex (PMd) and primary motor cortex (M1) while monkeys reach to randomly placed targets. The hand's position within the workspace creates probability distributions of possible upcoming targets, which affect movement trajectories and latencies. PMd, but not M1, neurons have increased activity when the monkey's hand position makes it likely the upcoming movement will be in the neurons' preferred directions. Across the population, PMd activity represents probability distributions of individual upcoming reaches, which depend on rapidly changing information about the body's state in the environment.
Conflict of interest statement
The authors declare no competing interests.
Figures
Comment in
-
Neurons That Update Representations of the Future.Trends Cogn Sci. 2018 Aug;22(8):671-673. doi: 10.1016/j.tics.2018.05.012. Epub 2018 Jun 11. Trends Cogn Sci. 2018. PMID: 29903692
References
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources
