

doi: 10.1038/s41562-018-0324-5.
Epub 2018 Apr 9.
Multiple motor memories are learned to control different points on a tool
Affiliations
- PMID: 29736420
- PMCID: PMC5935225
- DOI: 10.1038/s41562-018-0324-5
Item in Clipboard
Multiple motor memories are learned to control different points on a tool
Nat Hum Behav.
2018 Apr.
No abstract available
Conflict of interest statement
Competing interests The authors declare no competing interests.
Figures
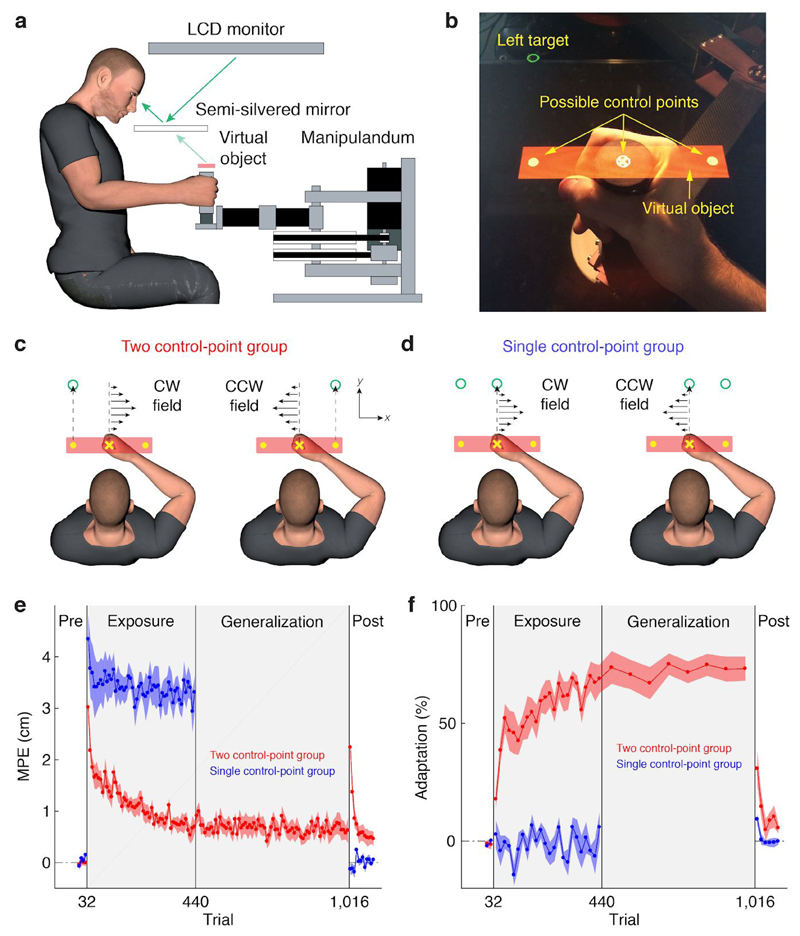
Separate motor memories are formed for different control points. Experimental paradigm and learning curves for Experiment 1. (a) Participants grasped the handle of a robotic manipulandum. A semi-silvered mirror allowed the participant to view their hand as well as a virtual object that was reflected from the monitor. (b) Photograph of the hand, the virtual object and target, as seen from the perspective of the participant. Depending on the experiment and trial type, one of three control points on the object had to be aligned with a target placed above it. (c) Participants in the two control-point group moved the left or right control point to its corresponding target. The direction of the force field applied to the hand was determined by the target/control point. (d) Participants in the single control-point group moved the central control point to a central target. The direction of the field applied to the hand was cued by which lateral 'target' was displayed. (e) Kinematic error measured as the maximum perpendicular error (MPE: deviation from a straight line to the target) over the course of the experiment. Data were first averaged over blocks of eight exposure trials and then plotted as mean across participants ± 1 s.e.m. Gray background shows the period when the force field was turned on. (f) same as (e) but for percentage adaptation measured on channel trials. The generalization phase was performed by the two control-point group (n = 10) but omitted for the single control-point group (n = 8).
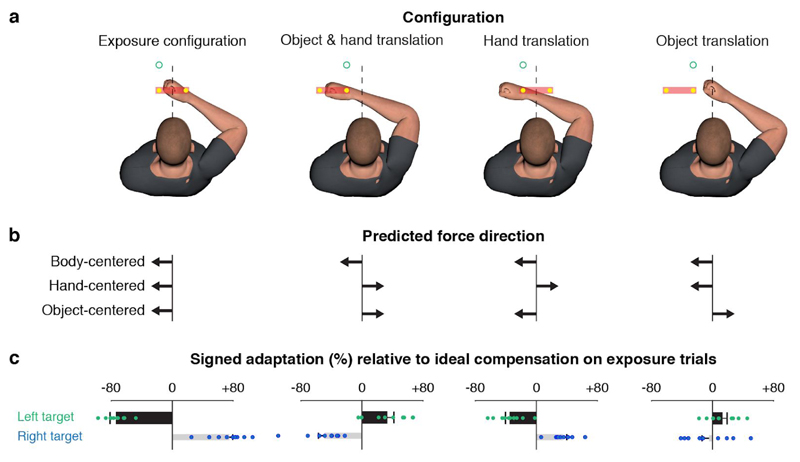
Control points are represented in an object-centered frame of reference. (a) Configurations used to examine generalization of learning for trials with the left target. For trials with the right target all translations were reversed. All these trials were channel trials. (b) Predictions of the direction of force according to the three possible representations. Note these are for the scenario in which the left and right targets/control points were associated with the CW and CCW fields, respectively. The predictions for the right target (not shown) are in the opposite directions. (c) Mean + 1 s.e.m. signed adaptation across participants (n = 10) relative to the ideal compensation on exposure trials. The sign of the bars, positive and negative, indicate compensatory forces appropriate for CCW and CW fields, respectively. Black and gray bars correspond to trials with the left and right targets, respectively. Dots represent data from individual participants.
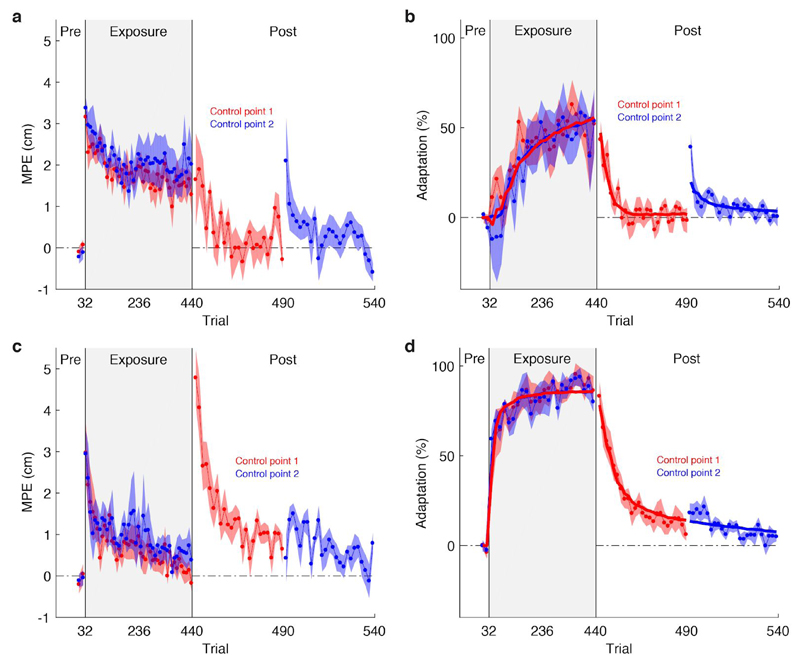
The encoding of dynamics for different control points depends on the fields experienced. (a) MPE ± 1 s.e.m. and (b) adaptation ± 1 s.e.m. for each control point in the group that experienced opposing force fields at each control point (n = 8). Data in the pre-exposure and exposure phases were first averaged over blocks of eight trials. The post-exposure phase has been expanded for clarity. For simplicity, the sign of adaptation for control point 2 has been inverted. (c) & (d) are the same as (a) & (b) but for the group that experienced the same force field at each control point (n = 8). Solid lines in (b) and (d) show the mean switching state-space model fits across participants.
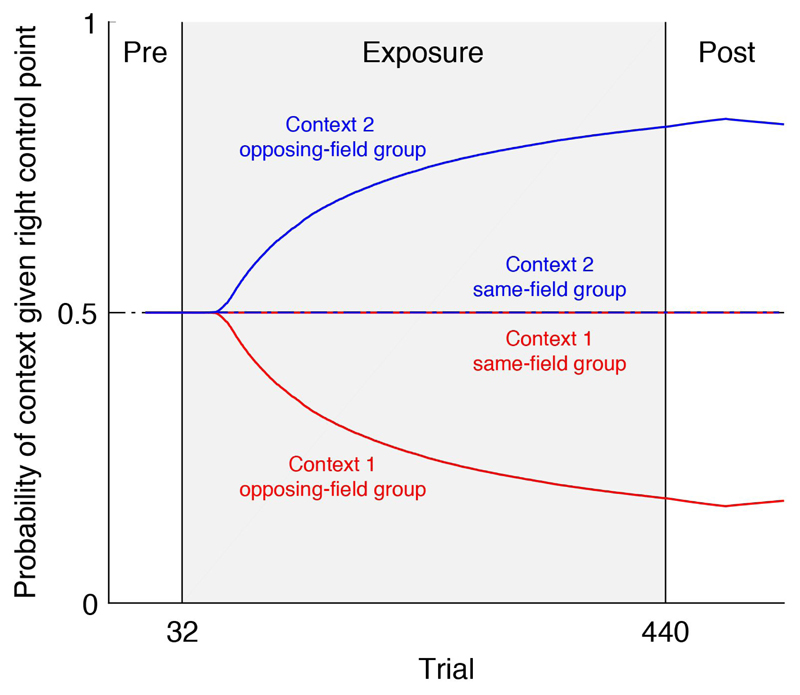
Learning to associate contexts with cues in the switching state-space model. The switching state-space model estimates the probability of each context given the cue (plotted here for the right control point cue prior to movement). Following exposure to opposing force fields, participants learn to differentiate between the two contexts given the right control point. Participants trained on the same force field at each control point do not learn to differentiate between contexts, leading to a single motor memory. Traces show mean model fits across participants. The plot for the left control point (not shown) is the mirror image about the line 0.5.
References
-
- Shadmehr R, Smith MA, Krakauer JW. Error correction, sensory prediction, and adaptation in motor control. Annu Rev Neurosci. 2010;33:89–108. - PubMed
-
- Wolpert DM, Diedrichsen J, Flanagan JR. Principles of sensorimotor learning. Nat Rev Neurosci. 2011;12:739–751. - PubMed
-
- Johansson RS, Westling G. Roles of glabrous skin receptors and sensorimotor memory in automatic control of precision grip when lifting rougher or more slippery objects. Exp Brain Res. 1984;56:550–564. - PubMed
-
- Johansson RS, Flanagan JR. Coding and use of tactile signals from the fingertips in object manipulation tasks. Nat Rev Neurosci. 2009;10:345–359. - PubMed
-
- Ingram JN, Wolpert DM. Naturalistic approaches to sensorimotor control. Prog Brain Res. 2011;191:3–29. - PubMed
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources
