

The limits of earthquake early warning: Timeliness of ground motion estimates
- PMID: 29750190
- PMCID: PMC5943053
- DOI: 10.1126/sciadv.aaq0504
The limits of earthquake early warning: Timeliness of ground motion estimates
Abstract
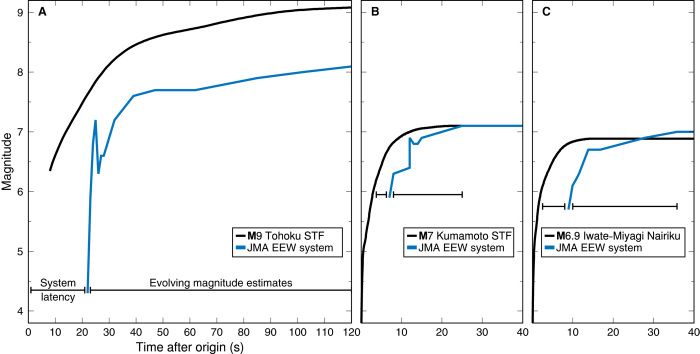
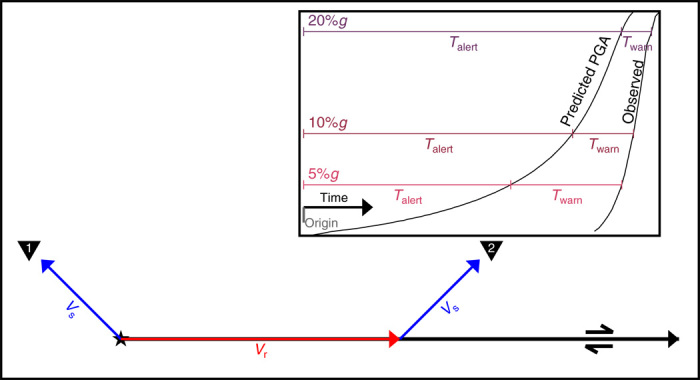
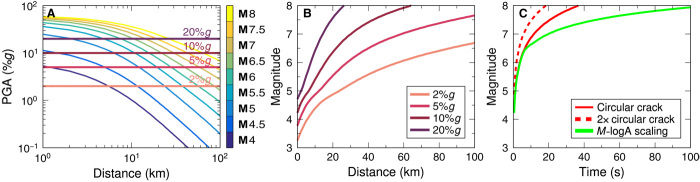
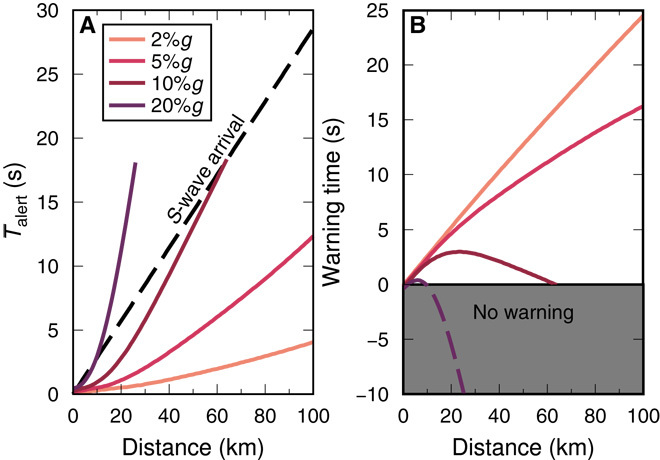
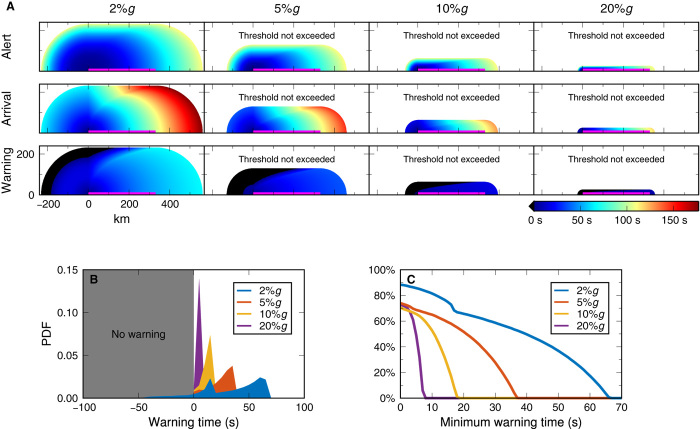
The basic physics of earthquakes is such that strong ground motion cannot be expected from an earthquake unless the earthquake itself is very close or has grown to be very large. We use simple seismological relationships to calculate the minimum time that must elapse before such ground motion can be expected at a distance from the earthquake, assuming that the earthquake magnitude is not predictable. Earthquake early warning (EEW) systems are in operation or development for many regions around the world, with the goal of providing enough warning of incoming ground shaking to allow people and automated systems to take protective actions to mitigate losses. However, the question of how much warning time is physically possible for specified levels of ground motion has not been addressed. We consider a zero-latency EEW system to determine possible warning times a user could receive in an ideal case. In this case, the only limitation on warning time is the time required for the earthquake to evolve and the time for strong ground motion to arrive at a user's location. We find that users who wish to be alerted at lower ground motion thresholds will receive more robust warnings with longer average warning times than users who receive warnings for higher ground motion thresholds. EEW systems have the greatest potential benefit for users willing to take action at relatively low ground motion thresholds, whereas users who set relatively high thresholds for taking action are less likely to receive timely and actionable information.
Figures
References
-
- Wu S., Beck J. L., Heaton T. H., ePAD: Earthquake probability-based automated decision-making framework for earthquake early warning. Comput. Aided Civ. Inf. 28, 737–752 (2013).
-
- Espinosa-Aranda J. M., Cuellar A., Garcia A., Ibarrola G., Islas R., Maldonado S., Rodriguez F. H., Evolution of the Mexican Seismic Alert System (SASMEX). Seismol. Res. Lett. 80, 694–706 (2009).
-
- Hoshiba M., Iwakiri K., Hayashimoto N., Shimoyama T., Hirano K., Yamada Y., Ishigaki Y., Kikuta H., Outline of the 2011 off the Pacific coast of Tohoku Earthquake (Mw 9.0): Earthquake early warning and observed seismic intensity. Earth Planets Space 63, 7 (2011).
-
- Kohler M. D., Cochran E. S., Given D., Guiwits S., Neuhauser D., Henson I., Hartog R., Bodin P., Kress V., Thompson S., Felizardo C., Brody J., Bhadha R., Schwarz S., Earthquake early warning ShakeAlert system: West coast wide production prototype. Seismol. Res. Lett. 89, 99–107 (2017).
-
- Fujinawa Y., Noda Y., Japan’s earthquake early warning system on 11 March 2011: Performance, shortcomings, and changes. Earthquake Spectra 29, S341–S368 (2013).
Publication types
LinkOut - more resources
Full Text Sources
Other Literature Sources
