

A Subject-Specific Kinematic Model to Predict Human Motion in Exoskeleton-Assisted Gait
- PMID: 29755336
- PMCID: PMC5934493
- DOI: 10.3389/fnbot.2018.00018
A Subject-Specific Kinematic Model to Predict Human Motion in Exoskeleton-Assisted Gait
Abstract
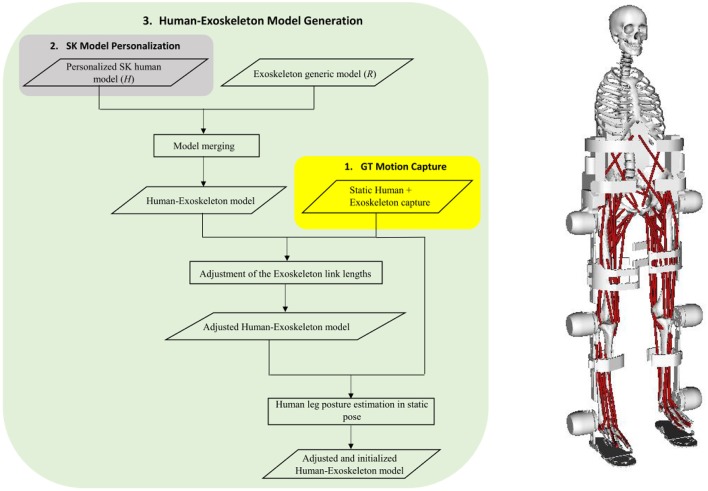
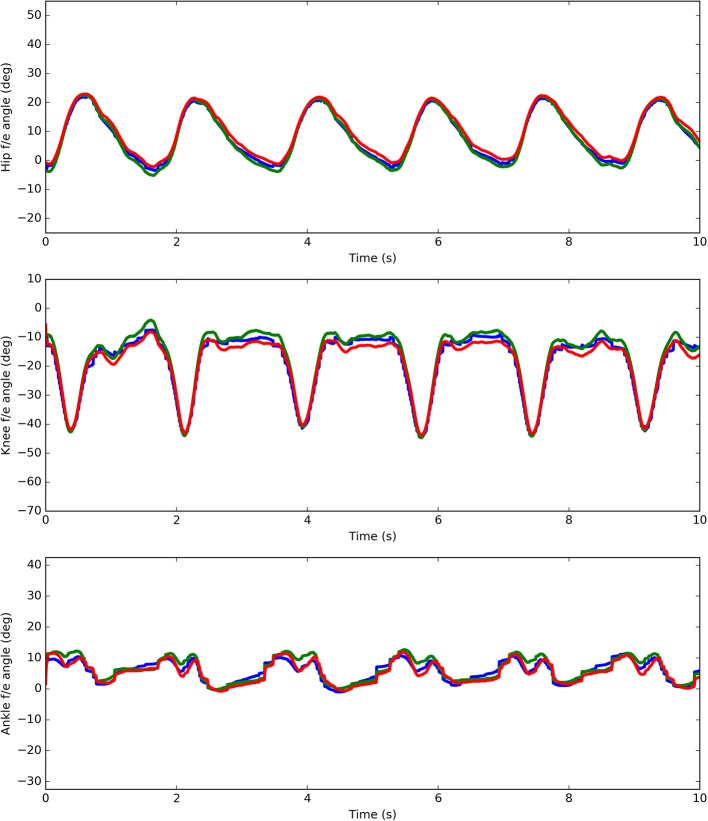
The relative motion between human and exoskeleton is a crucial factor that has remarkable consequences on the efficiency, reliability and safety of human-robot interaction. Unfortunately, its quantitative assessment has been largely overlooked in the literature. Here, we present a methodology that allows predicting the motion of the human joints from the knowledge of the angular motion of the exoskeleton frame. Our method combines a subject-specific skeletal model with a kinematic model of a lower limb exoskeleton (H2, Technaid), imposing specific kinematic constraints between them. To calibrate the model and validate its ability to predict the relative motion in a subject-specific way, we performed experiments on seven healthy subjects during treadmill walking tasks. We demonstrate a prediction accuracy lower than 3.5° globally, and around 1.5° at the hip level, which represent an improvement up to 66% compared to the traditional approach assuming no relative motion between the user and the exoskeleton.
Keywords: benchmarking; lower limb; rehabilitation; skeletal modeling; walking; wearable robot.
Figures







References
-
- Alvarez M. T., Torricelli D., del-Ama A. J., Pinto D., Gonzalez-Vargas J., Moreno J. C., et al. (2017). Simultaneous estimation of human and exoskeleton motion: a simplified protocol, in 2017 International Conference on Rehabilitation Robotics (ICORR) (London, UK: IEEE; ), 1431–1436. (Accessed December 10, 2017). - PubMed
LinkOut - more resources
Full Text Sources
Other Literature Sources