

Design of an Inertial-Sensor-Based Data Glove for Hand Function Evaluation
- PMID: 29757261
- PMCID: PMC5982580
- DOI: 10.3390/s18051545
Design of an Inertial-Sensor-Based Data Glove for Hand Function Evaluation
Abstract
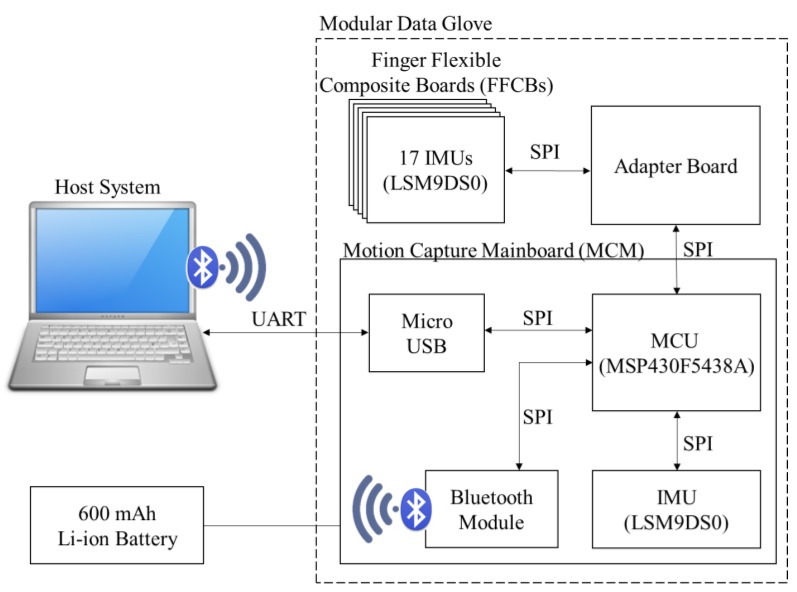
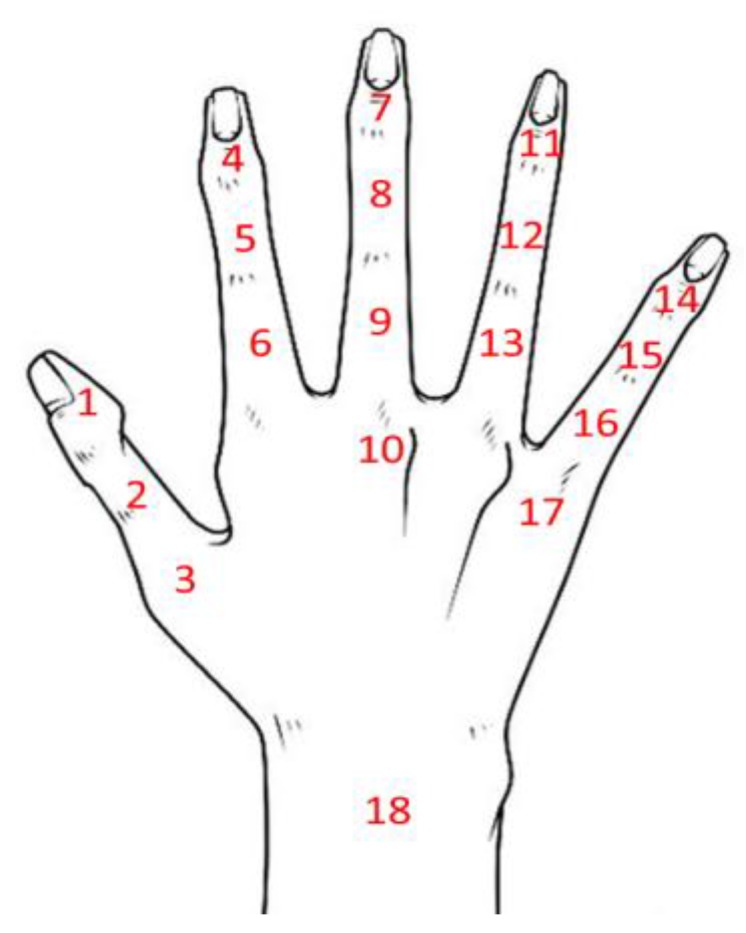
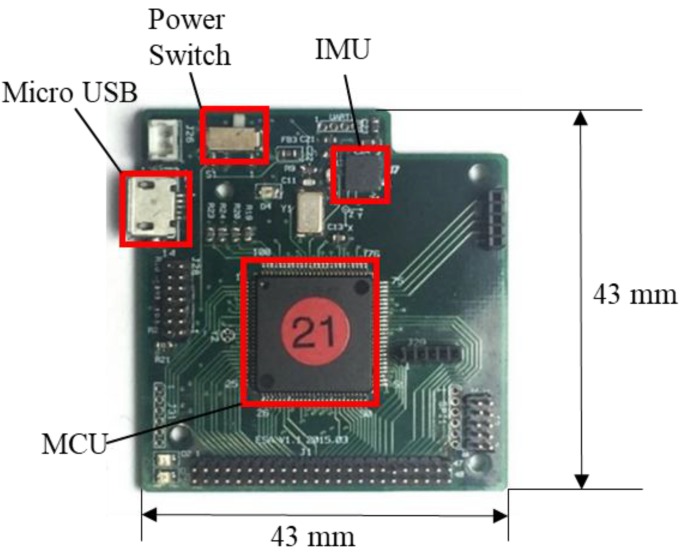
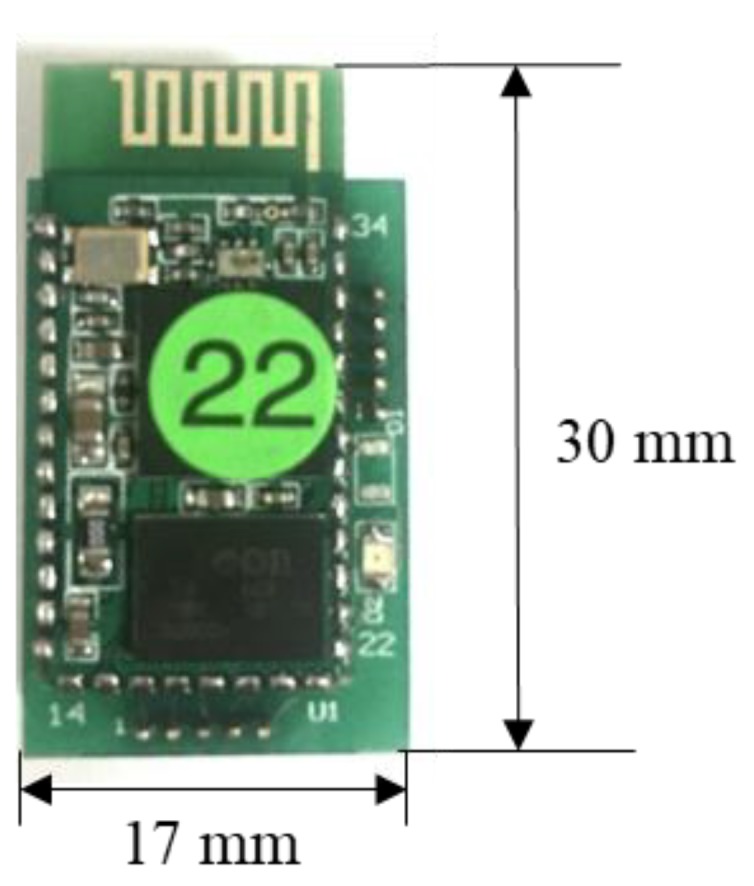
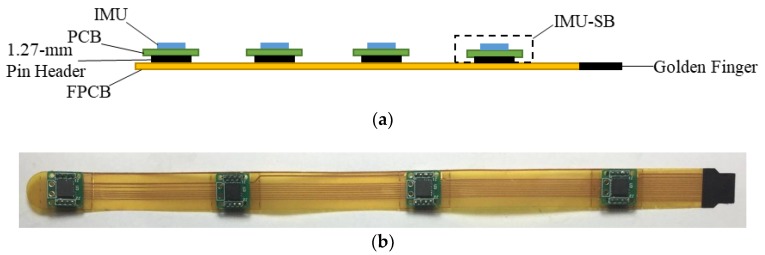
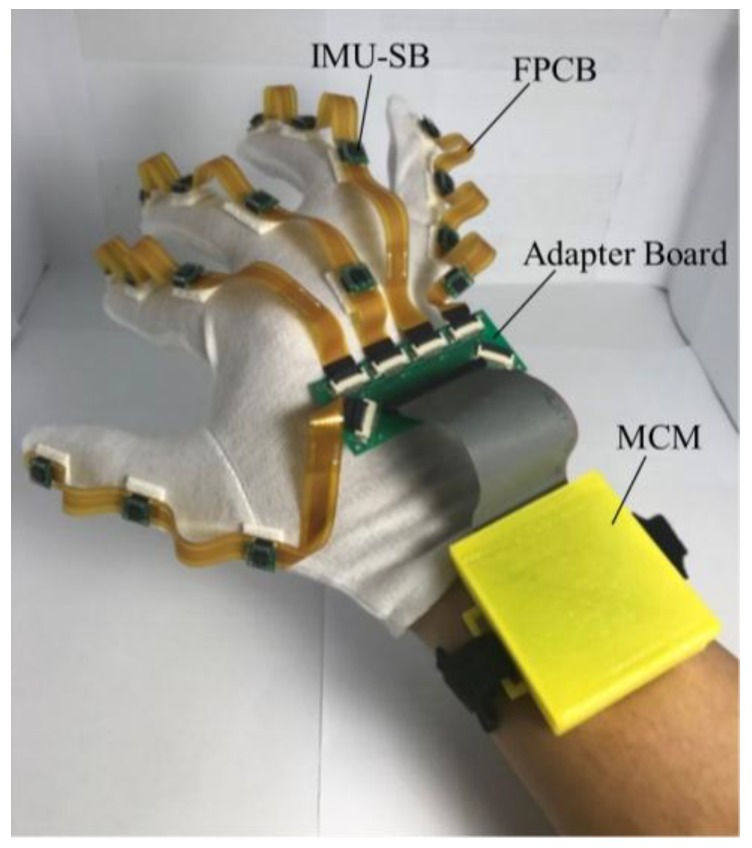
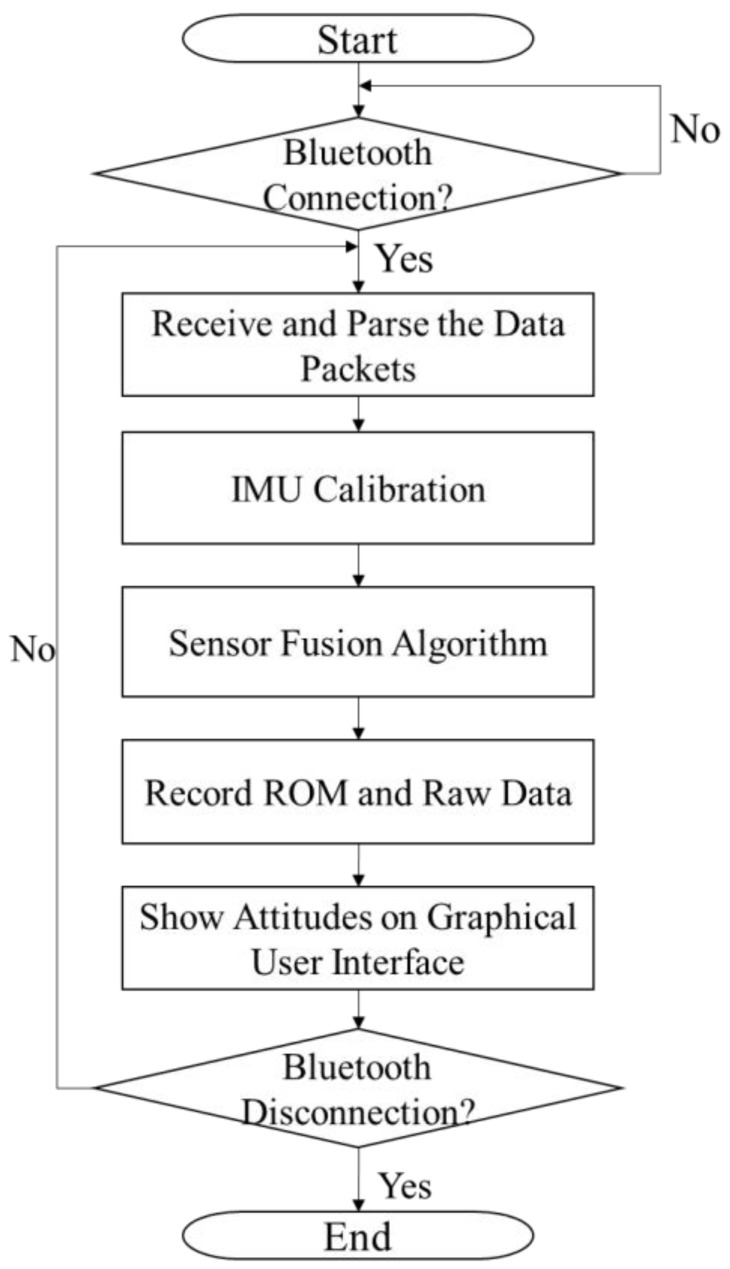
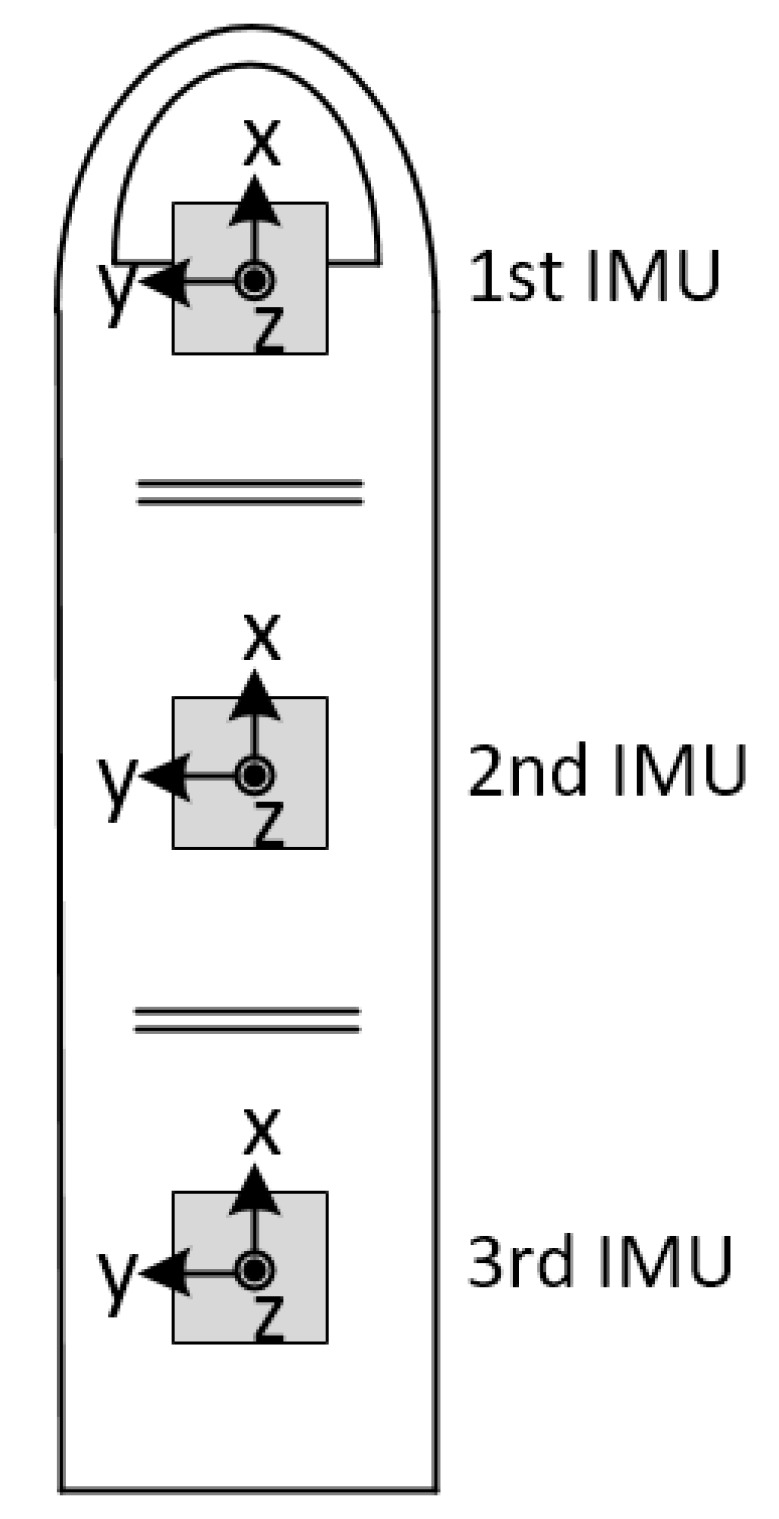
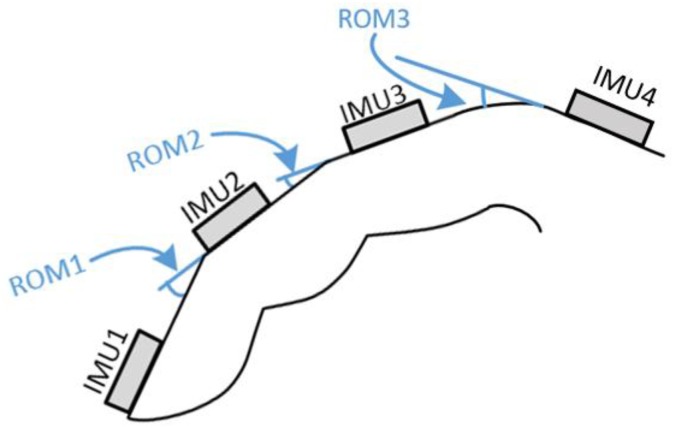
Capturing hand motions for hand function evaluations is essential in the medical field. Various data gloves have been developed for rehabilitation and manual dexterity assessments. This study proposed a modular data glove with 9-axis inertial measurement units (IMUs) to obtain static and dynamic parameters during hand function evaluation. A sensor fusion algorithm is used to calculate the range of motion of joints. The data glove is designed to have low cost, easy wearability, and high reliability. Owing to the modular design, the IMU board is independent and extensible and can be used with various microcontrollers to realize more medical applications. This design greatly enhances the stability and maintainability of the glove.
Keywords: data glove; inertial sensor; joint measurement; motion capture; rehabilitation.
Conflict of interest statement
The authors declare no conflict of interest.
Figures
References
-
- Wang Q., Chen W., Markopoulos P. Literature review on wearable systems in upper extremity rehabilitation; Proceedings of the IEEE-EMBS International Conference on Biomedical and Health Informatics; Valencia, Spain. 1–4 June 2014.
-
- Liu H. Exploring human hand capabilities into embedded multifingered object manipulation. IEEE Trans. Ind. Inform. 2011;7:389–398. doi: 10.1109/TII.2011.2158838. - DOI
-
- Park Y., Lee J., Bae J. Development of a wearable sensing glove for measuring the motion of fingers using linear potentiometers and flexible wires. IEEE Trans. Ind. Inform. 2015;11:198–206. doi: 10.1109/TII.2014.2381932. - DOI
LinkOut - more resources
Full Text Sources
Other Literature Sources
