

Collective gradient sensing in fish schools
- PMID: 29765115
- PMCID: PMC5954127
- DOI: 10.1038/s41598-018-26037-9
Collective gradient sensing in fish schools
Abstract
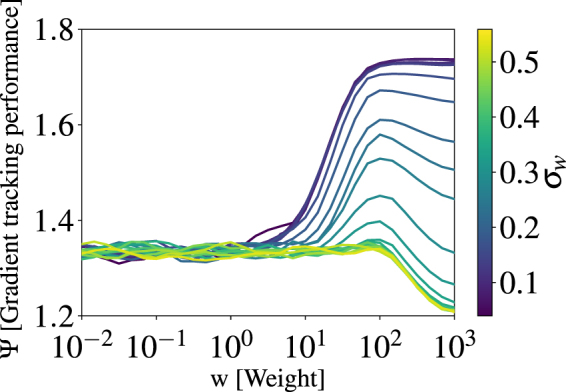
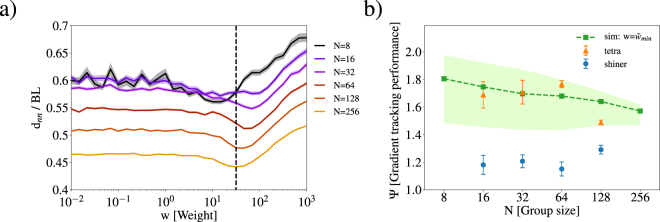
Throughout the animal kingdom, animals frequently benefit from living in groups. Models of collective behaviour show that simple local interactions are sufficient to generate group morphologies found in nature (swarms, flocks and mills). However, individuals also interact with the complex noisy environment in which they live. In this work, we experimentally investigate the group performance in navigating a noisy light gradient of two unrelated freshwater species: golden shiners (Notemigonuscrysoleucas) and rummy nose tetra (Hemigrammus bleheri). We find that tetras outperform shiners due to their innate individual ability to sense the environmental gradient. Using numerical simulations, we examine how group performance depends on the relative weight of social and environmental information. Our results highlight the importance of balancing of social and environmental information to promote optimal group morphologies and performance.
Conflict of interest statement
The authors declare no competing interests.
Figures
References
-
- Couzin ID, Krause J. Self-organization and collective behavior in vertebrates. Advances in the Study of Behavior. 2003;32:1–75. doi: 10.1016/S0065-3454(03)01001-5. - DOI
-
- Sumpter, D. J. Collective animal behavior (Princeton University Press, Princeton, NJ, 2010).
-
- Reynolds CW. Flocks, herds and schools: A distributed behavioral model. ACM SIGGRAPH Computer Graphics. 1987;21:25–34. doi: 10.1145/37402.37406. - DOI
-
- Huth A, Wissel C. The simulation of fish schools in comparison with experimental data. Ecological modelling. 1994;76:135–145. doi: 10.1016/0304-3800(94)90013-2. - DOI
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
Other Literature Sources
