

An IoT-Enabled Stroke Rehabilitation System Based on Smart Wearable Armband and Machine Learning
- PMID: 29805919
- PMCID: PMC5957264
- DOI: 10.1109/JTEHM.2018.2822681
An IoT-Enabled Stroke Rehabilitation System Based on Smart Wearable Armband and Machine Learning
Abstract
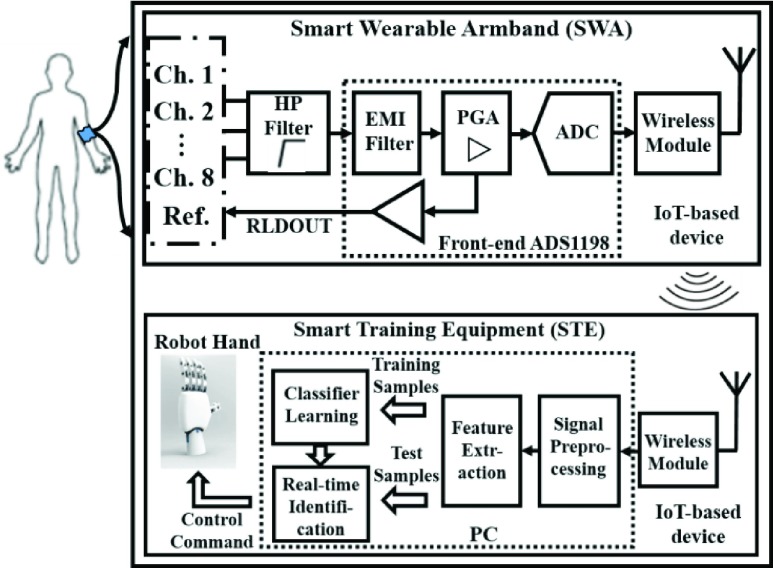
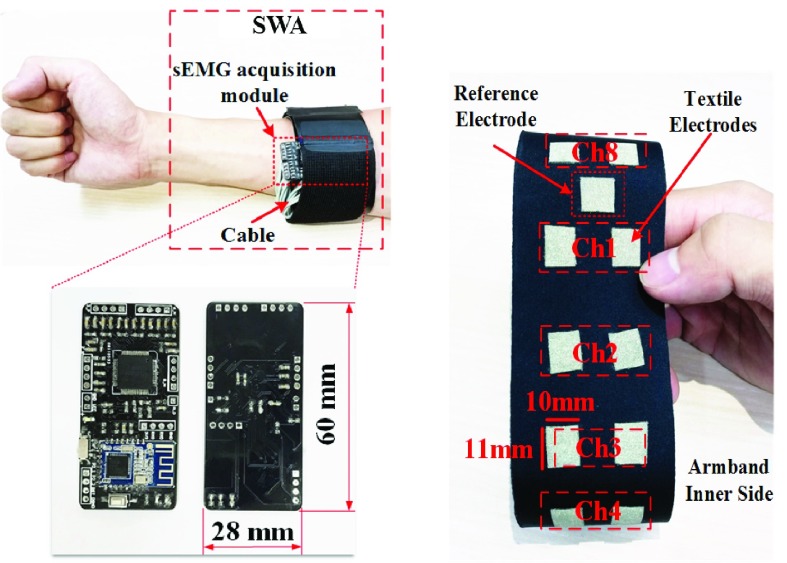
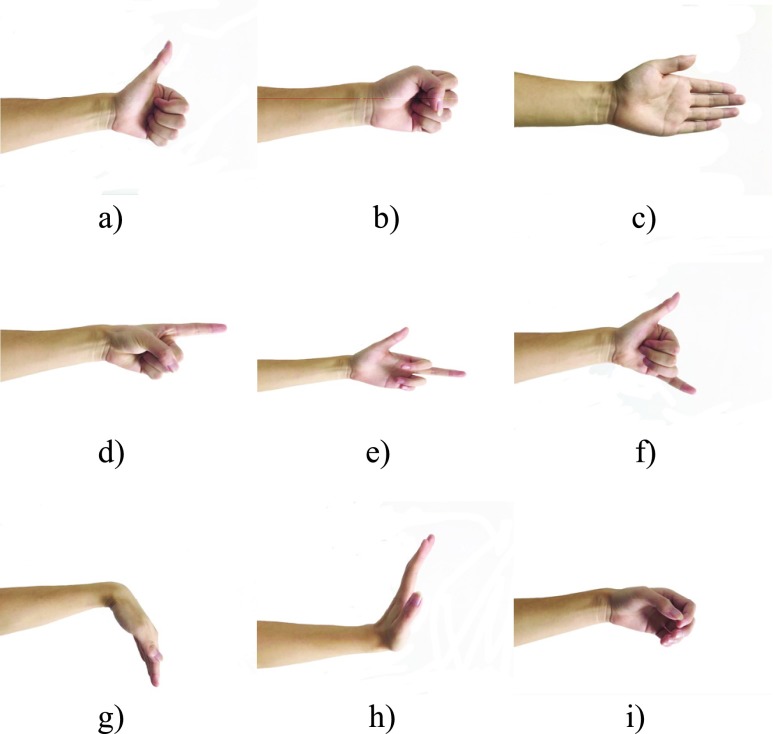
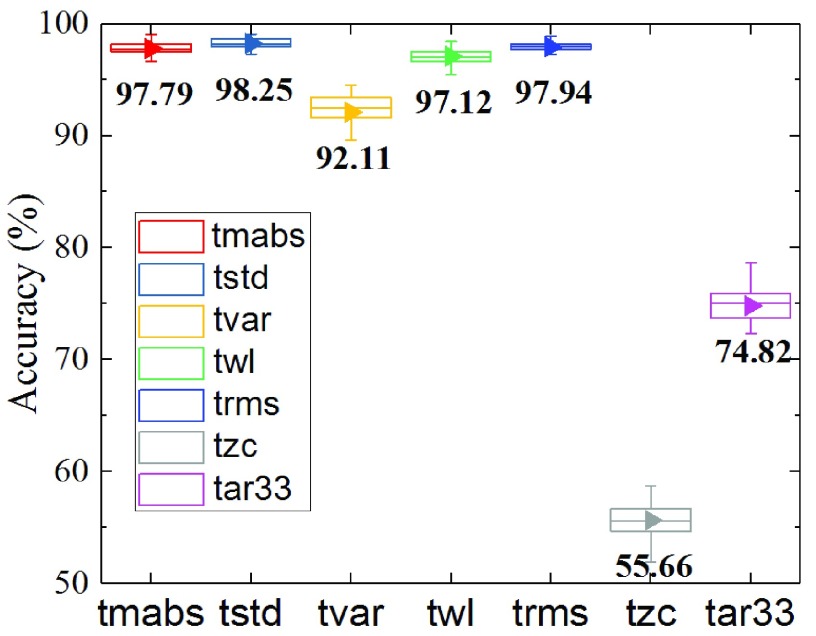
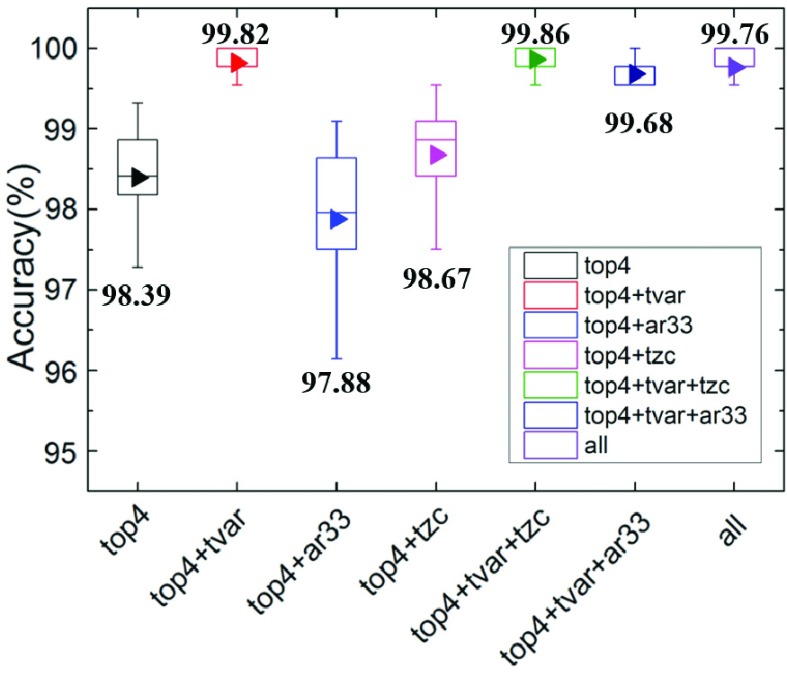
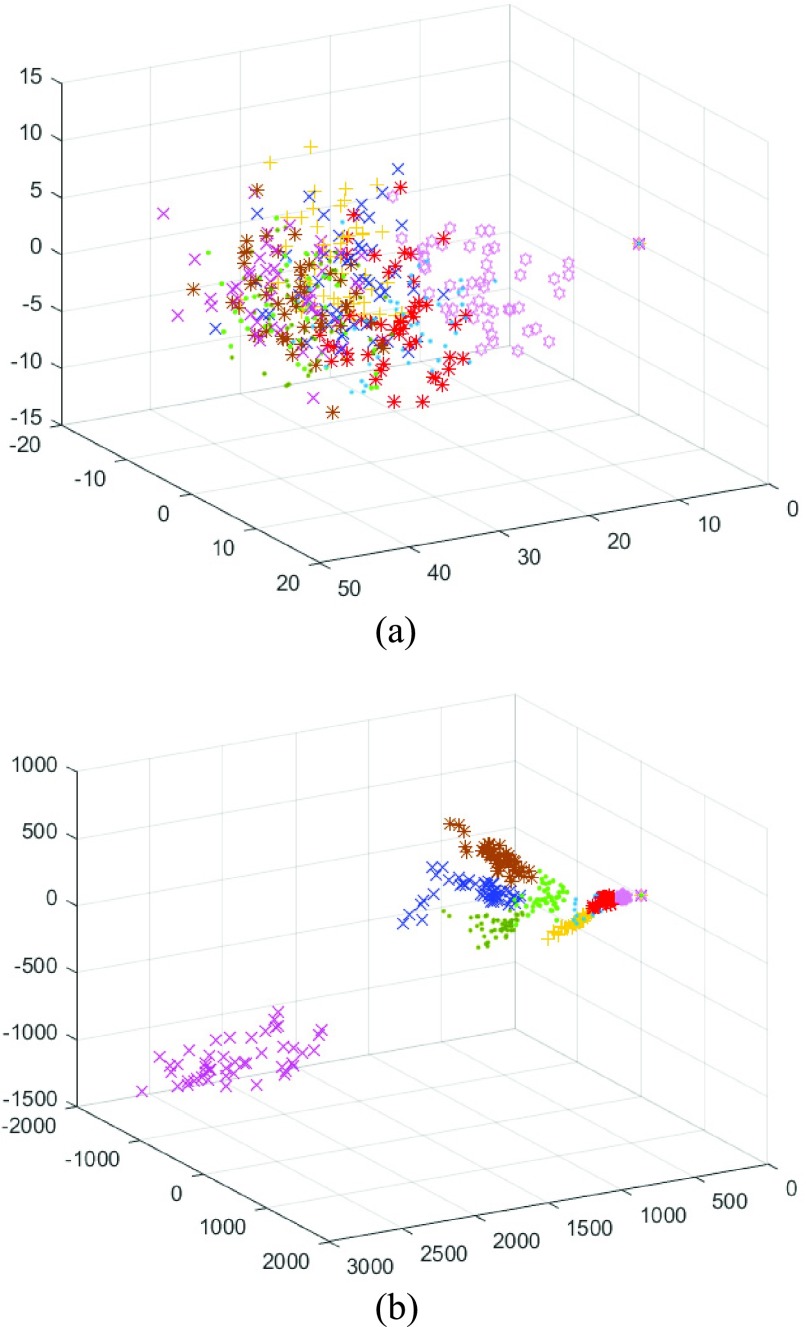
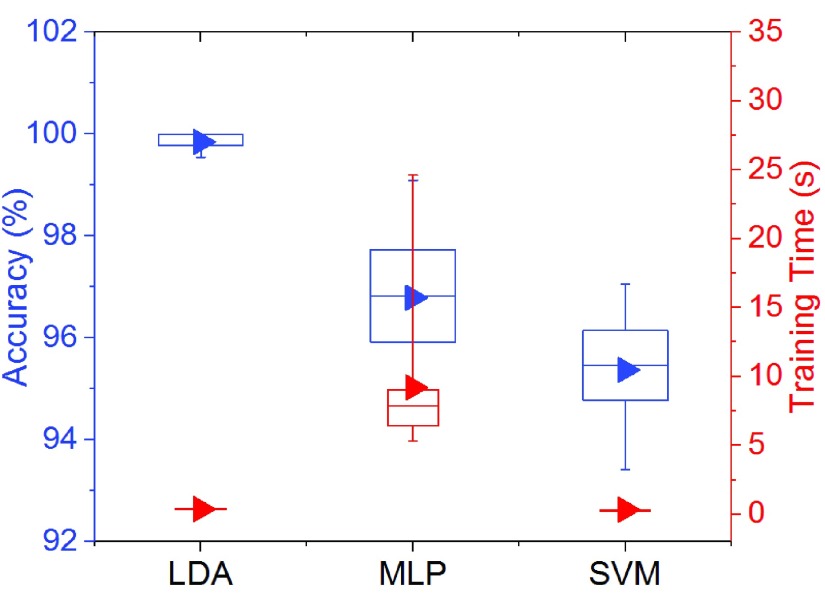
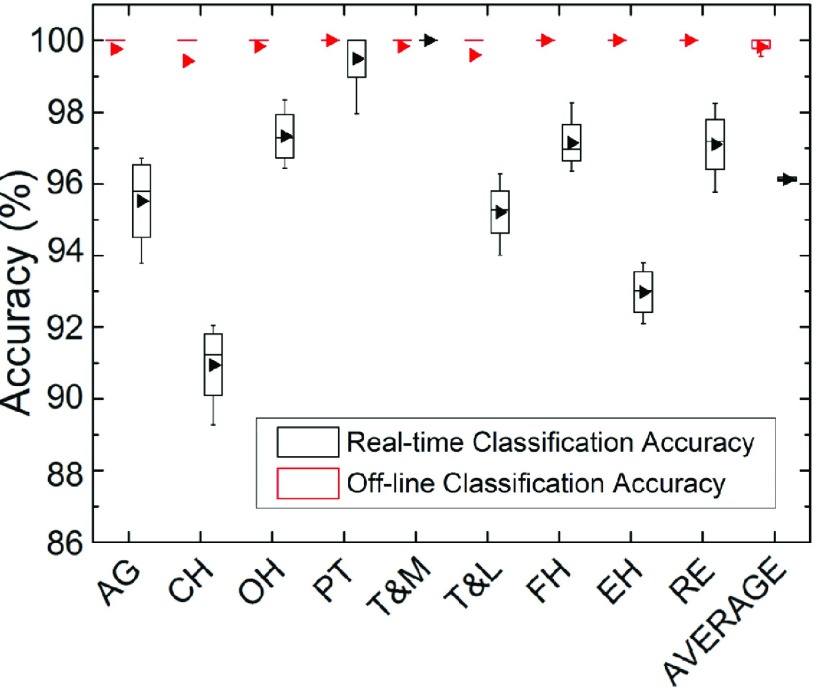
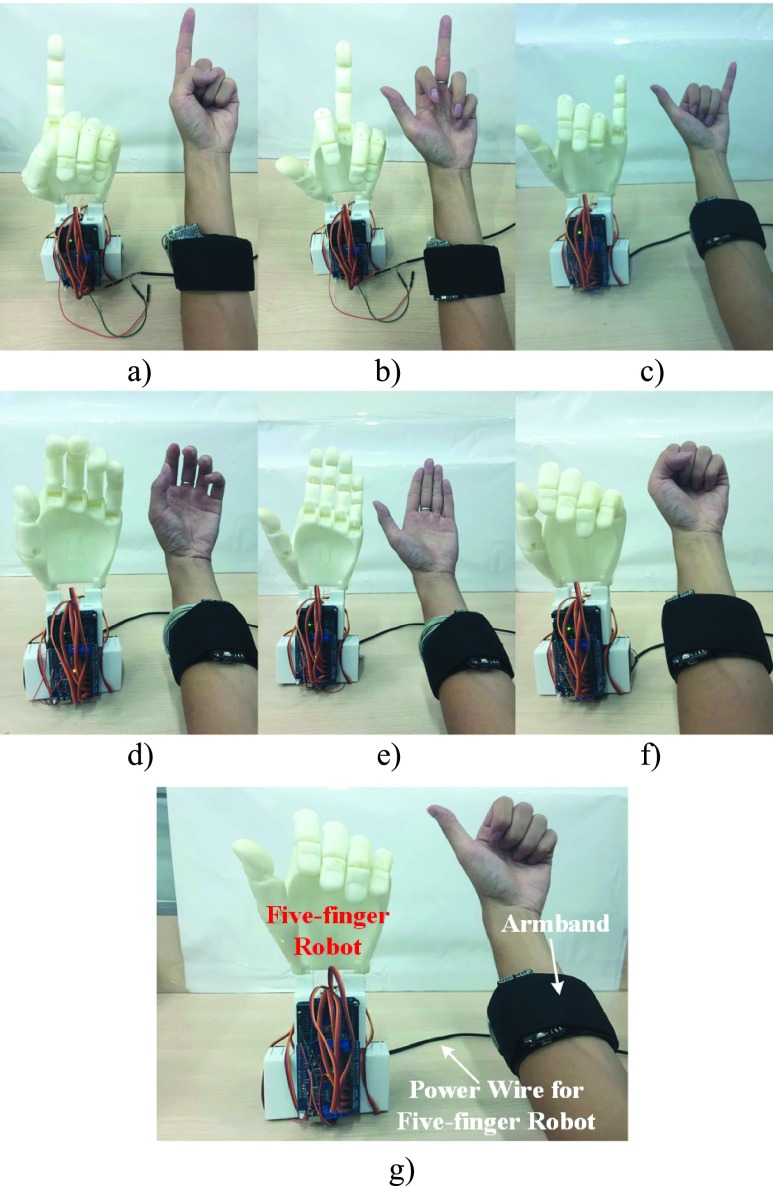
Surface electromyography signal plays an important role in hand function recovery training. In this paper, an IoT-enabled stroke rehabilitation system was introduced which was based on a smart wearable armband (SWA), machine learning (ML) algorithms, and a 3-D printed dexterous robot hand. User comfort is one of the key issues which should be addressed for wearable devices. The SWA was developed by integrating a low-power and tiny-sized IoT sensing device with textile electrodes, which can measure, pre-process, and wirelessly transmit bio-potential signals. By evenly distributing surface electrodes over user's forearm, drawbacks of classification accuracy poor performance can be mitigated. A new method was put forward to find the optimal feature set. ML algorithms were leveraged to analyze and discriminate features of different hand movements, and their performances were appraised by classification complexity estimating algorithms and principal components analysis. According to the verification results, all nine gestures can be successfully identified with an average accuracy up to 96.20%. In addition, a 3-D printed five-finger robot hand was implemented for hand rehabilitation training purpose. Correspondingly, user's hand movement intentions were extracted and converted into a series of commands which were used to drive motors assembled inside the dexterous robot hand. As a result, the dexterous robot hand can mimic the user's gesture in a real-time manner, which shows the proposed system can be used as a training tool to facilitate rehabilitation process for the patients after stroke.
Keywords: IoT-enabled wearable device; machine learning; sEMG control; stroke rehabilitation.
Figures

References
-
- Muth C. C., “Recovery after stroke,” JAMA, vol. 316, no. 22, p. 2440, 2016. - PubMed
-
- Twitchell T. E., “The restoration of motor function following hemiplegia in man,” Brain, vol. 74, no. 4, pp. 443–480, 1951. - PubMed
-
- Van Peppen R. P., Kwakkel G., Wood-Dauphinee S., Hendriks H. J., Van der Wees P. J., and Dekker J., “The impact of physical therapy on functional outcomes after stroke: What’s the evidence?” Clin. Rehabil., vol. 18, no. 8, pp. 833–862, Dec. 2004. - PubMed
LinkOut - more resources
Full Text Sources
Other Literature Sources
Research Materials
