

Variety Wins: Soccer-Playing Robots and Infant Walking
- PMID: 29867427
- PMCID: PMC5954208
- DOI: 10.3389/fnbot.2018.00019
Variety Wins: Soccer-Playing Robots and Infant Walking
Abstract
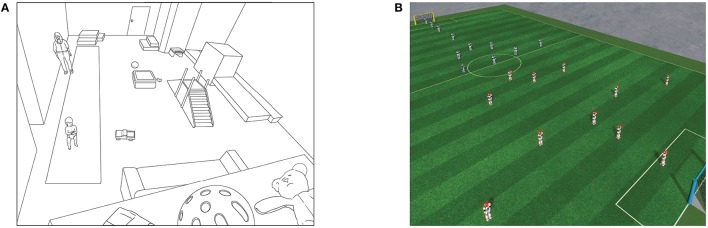
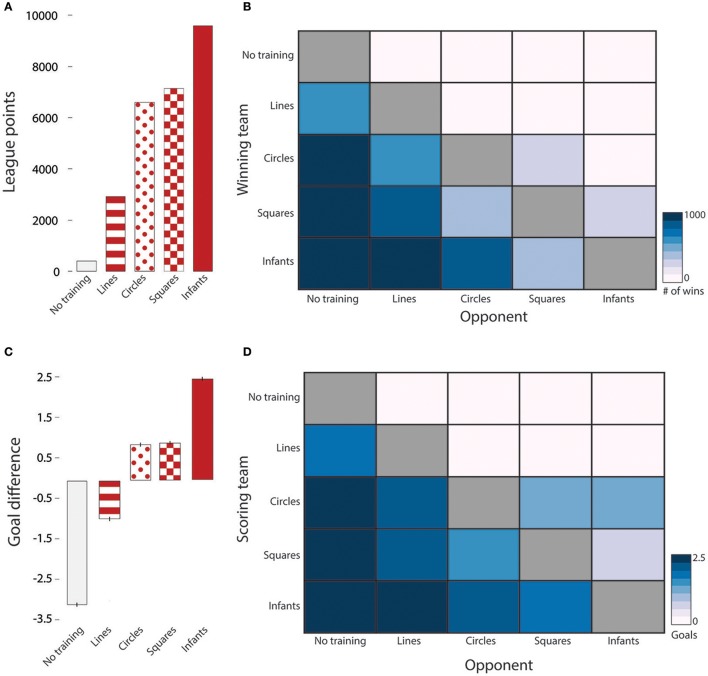
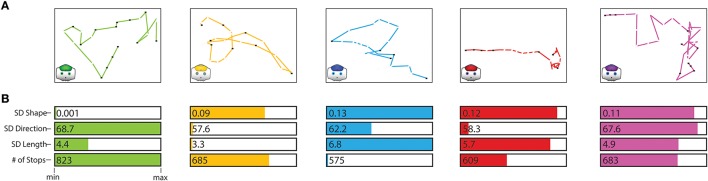
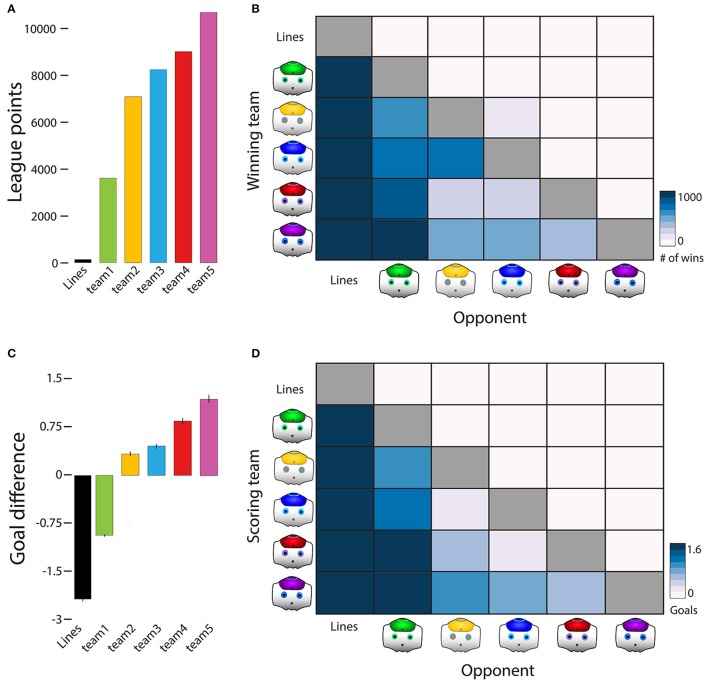
Although both infancy and artificial intelligence (AI) researchers are interested in developing systems that produce adaptive, functional behavior, the two disciplines rarely capitalize on their complementary expertise. Here, we used soccer-playing robots to test a central question about the development of infant walking. During natural activity, infants' locomotor paths are immensely varied. They walk along curved, multi-directional paths with frequent starts and stops. Is the variability observed in spontaneous infant walking a "feature" or a "bug?" In other words, is variability beneficial for functional walking performance? To address this question, we trained soccer-playing robots on walking paths generated by infants during free play and tested them in simulated games of "RoboCup." In Tournament 1, we compared the functional performance of a simulated robot soccer team trained on infants' natural paths with teams trained on less varied, geometric paths-straight lines, circles, and squares. Across 1,000 head-to-head simulated soccer matches, the infant-trained team consistently beat all teams trained with less varied walking paths. In Tournament 2, we compared teams trained on different clusters of infant walking paths. The team trained with the most varied combination of path shape, step direction, number of steps, and number of starts and stops outperformed teams trained with less varied paths. This evidence indicates that variety is a crucial feature supporting functional walking performance. More generally, we propose that robotics provides a fruitful avenue for testing hypotheses about infant development; reciprocally, observations of infant behavior may inform research on artificial intelligence.
Keywords: bipedal robotics; infant walking; locomotion; natural gait; robot soccer.
Figures
References
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources