

Control of human gait stability through foot placement
- PMID: 29875279
- PMCID: PMC6030625
- DOI: 10.1098/rsif.2017.0816
Control of human gait stability through foot placement
Abstract
During human walking, the centre of mass (CoM) is outside the base of support for most of the time, which poses a challenge to stabilizing the gait pattern. Nevertheless, most of us are able to walk without substantial problems. In this review, we aim to provide an integrative overview of how humans cope with an underactuated gait pattern. A central idea that emerges from the literature is that foot placement is crucial in maintaining a stable gait pattern. In this review, we explore this idea; we first describe mechanical models and concepts that have been used to predict how foot placement can be used to control gait stability. These concepts, such as for instance the extrapolated CoM concept, the foot placement estimator concept and the capture point concept, provide explicit predictions on where to place the foot relative to the body at each step, such that gait is stabilized. Next, we describe empirical findings on foot placement during human gait in unperturbed and perturbed conditions. We conclude that humans show behaviour that is largely in accordance with the aforementioned concepts, with foot placement being actively coordinated to body CoM kinematics during the preceding step. In this section, we also address the requirements for such control in terms of the sensory information and the motor strategies that can implement such control, as well as the parts of the central nervous system that may be involved. We show that visual, vestibular and proprioceptive information contribute to estimation of the state of the CoM. Foot placement is adjusted to variations in CoM state mainly by modulation of hip abductor muscle activity during the swing phase of gait, and this process appears to be under spinal and supraspinal, including cortical, control. We conclude with a description of how control of foot placement can be impaired in humans, using ageing as a primary example and with some reference to pathology, and we address alternative strategies available to stabilize gait, which include modulation of ankle moments in the stance leg and changes in body angular momentum, such as rapid trunk tilts. Finally, for future research, we believe that especially the integration of consideration of environmental constraints on foot placement with balance control deserves attention.
Keywords: balance; bipedal walking; foot placement; gait stability.
© 2018 The Authors.
Conflict of interest statement
We declare we have no competing interests.
Figures
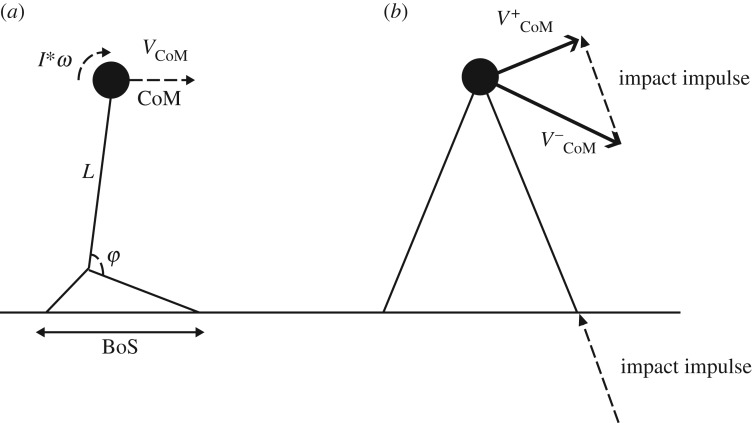
 is lower than the velocity before the collision
is lower than the velocity before the collision  , and hence, when no energy would be added to the system, the XCoM concept (and other similar concepts that do not model the impact) may predict that stability may be achieved, this may not be so.
, and hence, when no energy would be added to the system, the XCoM concept (and other similar concepts that do not model the impact) may predict that stability may be achieved, this may not be so.
References
-
- Grillner S. 1986. Interaction between sensory signals and the central networks controlling locomotion in lamprey, dogfish and cat. Neurobiology of vertebrate locomotion (ed. Grillner S.), pp. 505–512. Berlin, Germany: Springer.
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
Other Literature Sources
Medical
