

Automatic hand phantom map generation and detection using decomposition support vector machines
- PMID: 29890988
- PMCID: PMC5996576
- DOI: 10.1186/s12938-018-0502-8
Automatic hand phantom map generation and detection using decomposition support vector machines
Abstract
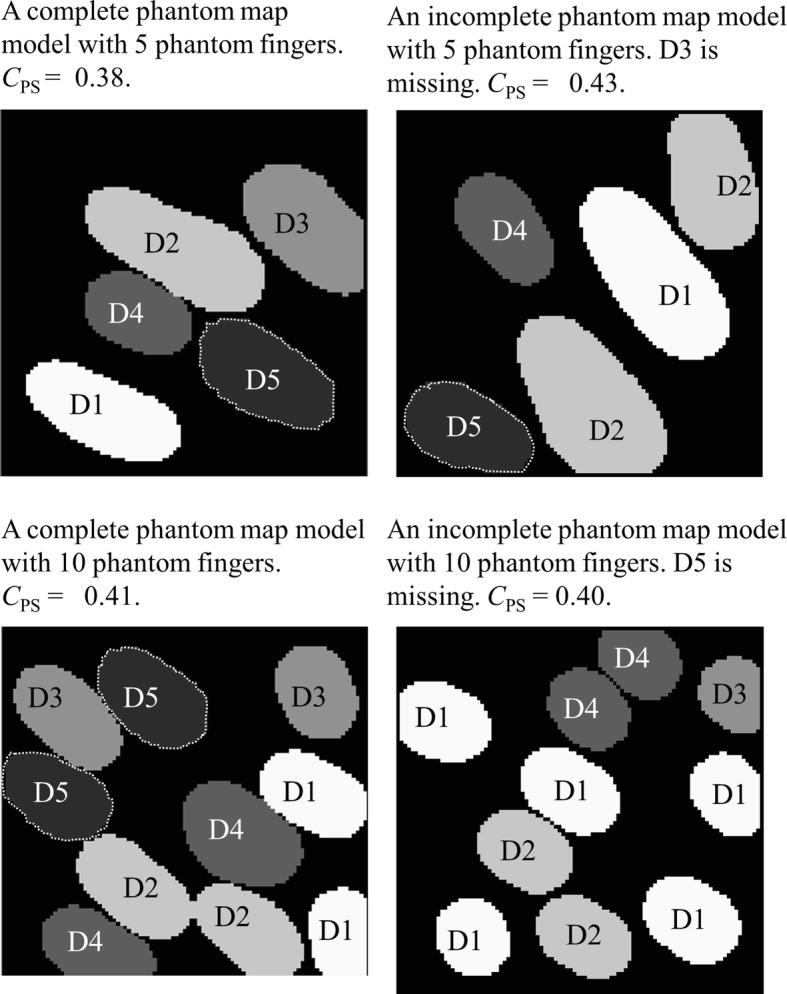
Background: There is a need for providing sensory feedback for myoelectric prosthesis users. Providing tactile feedback can improve object manipulation abilities, enhance the perceptual embodiment of myoelectric prostheses and help reduce phantom limb pain. Many amputees have referred sensation from their missing hand on their residual limbs (phantom maps). This skin area can serve as a target for providing amputees with non-invasive tactile sensory feedback. One of the challenges of providing sensory feedback on the phantom map is to define the accurate boundary of each phantom digit because the phantom map distribution varies from person to person.
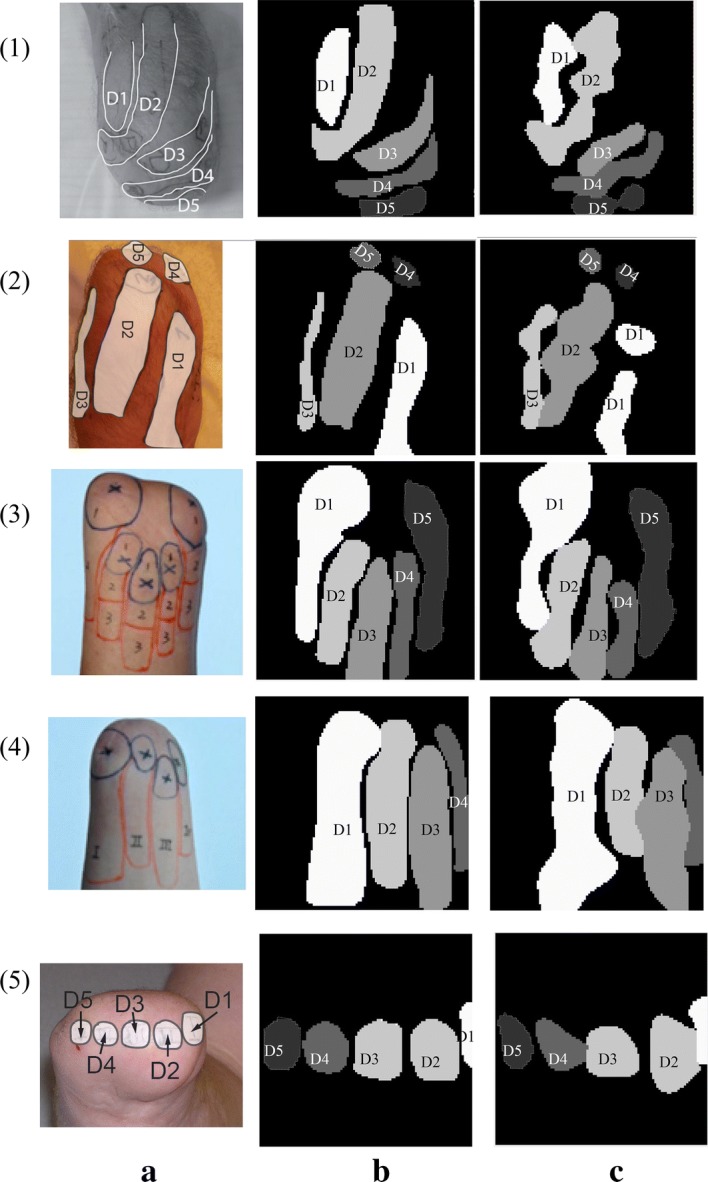
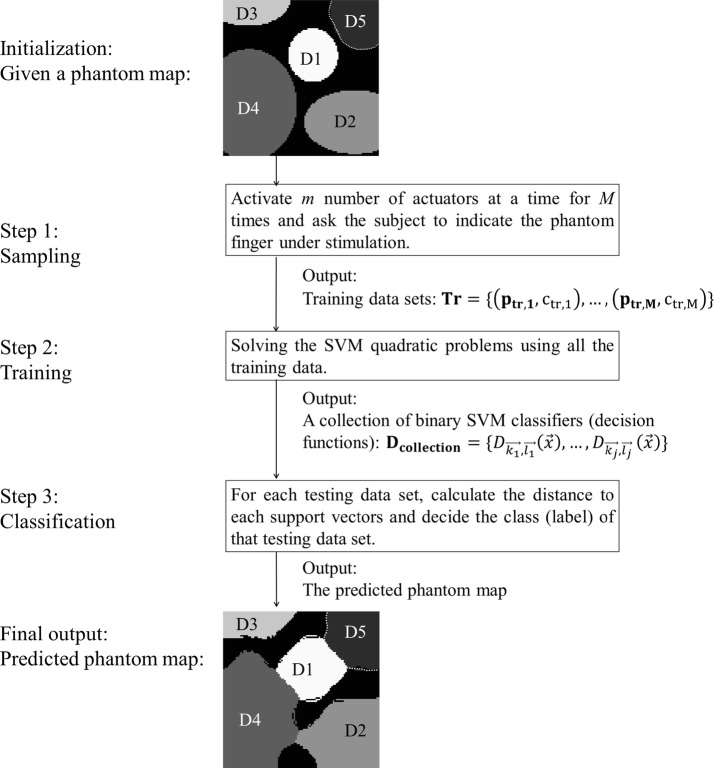
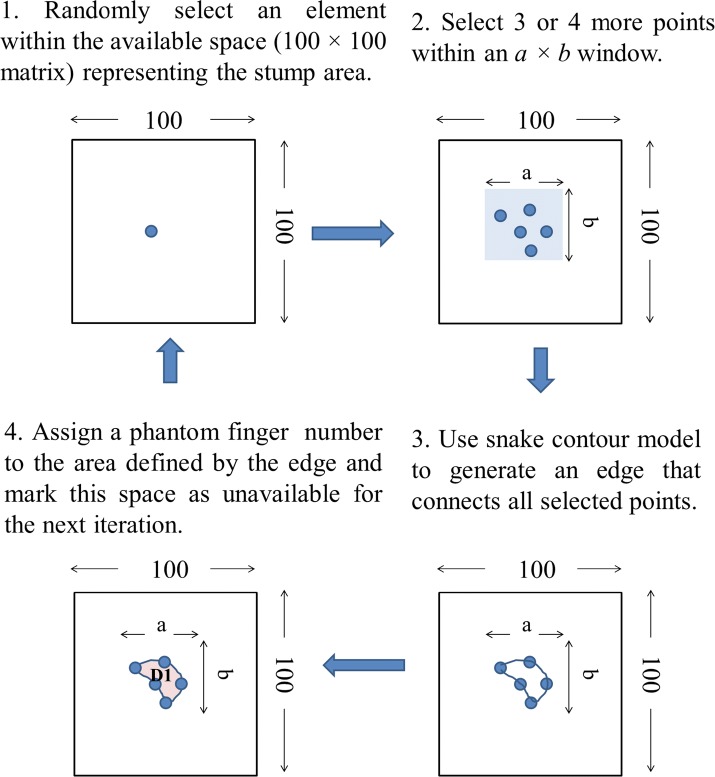
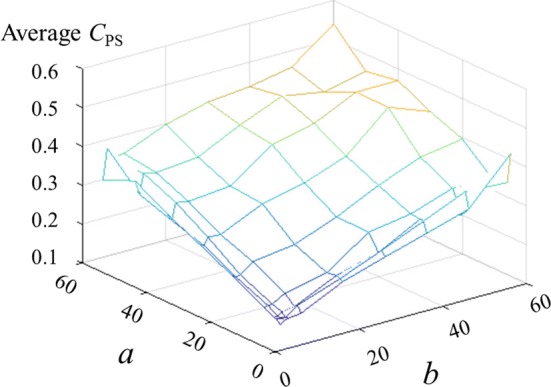
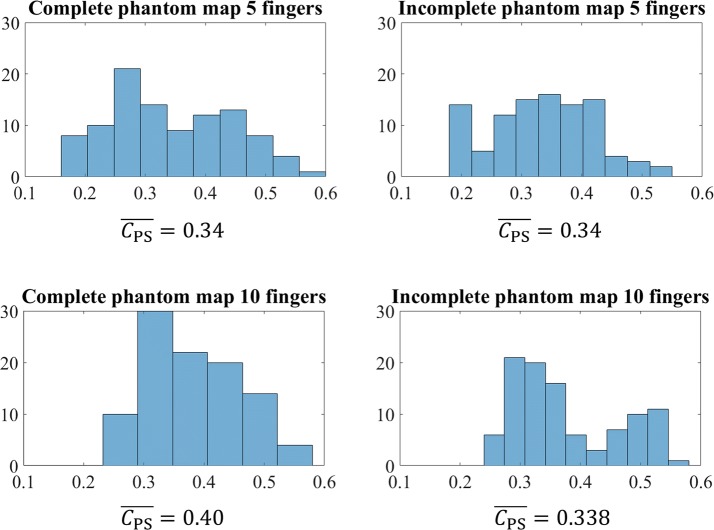
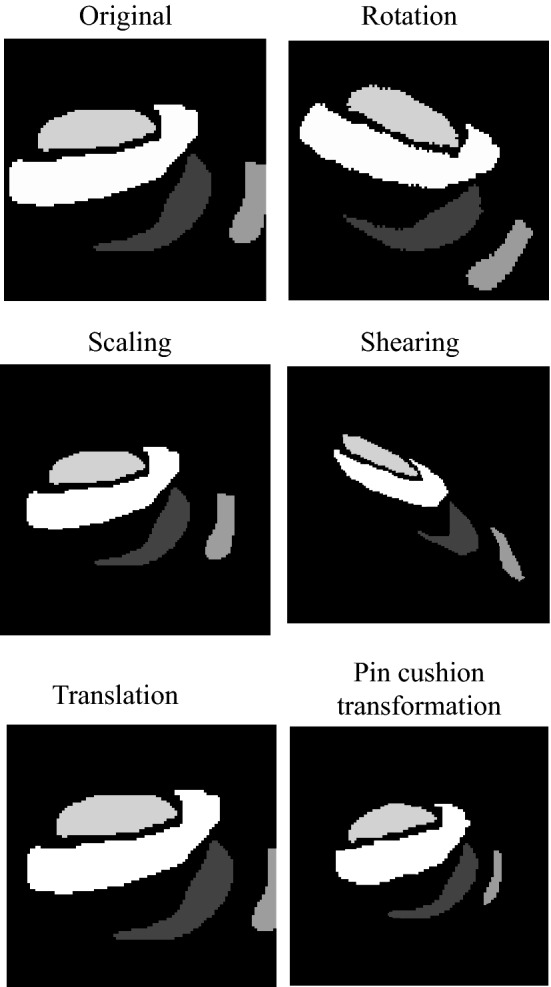
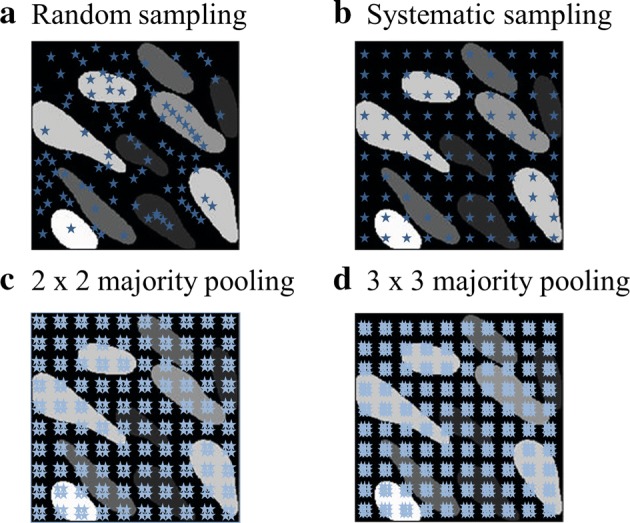
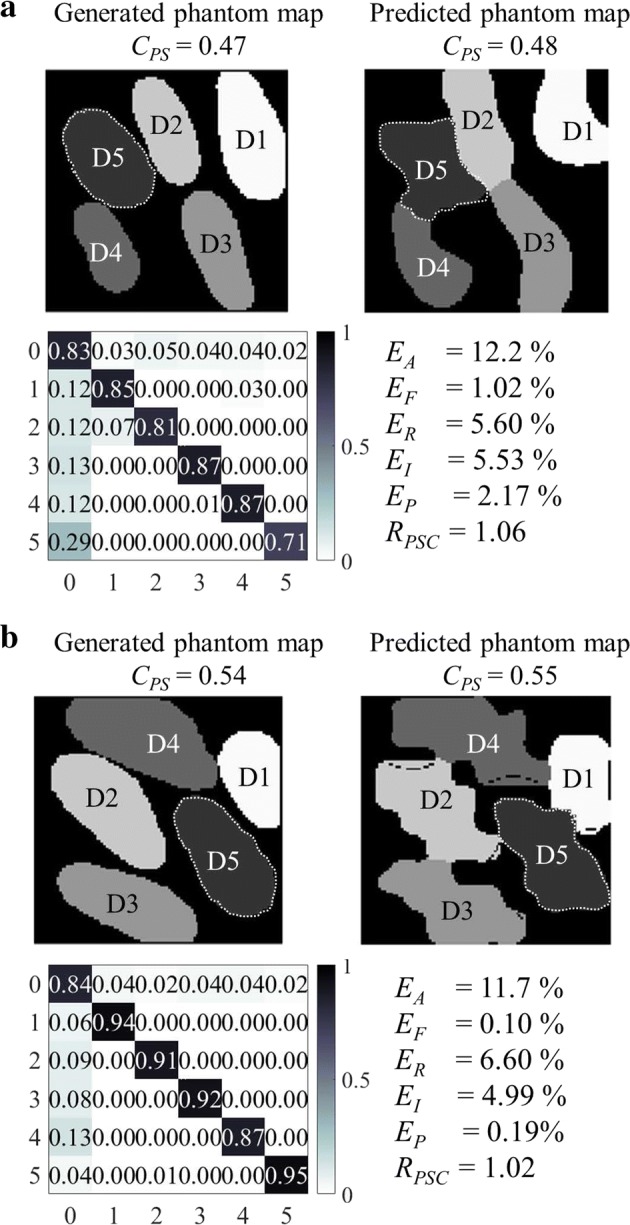
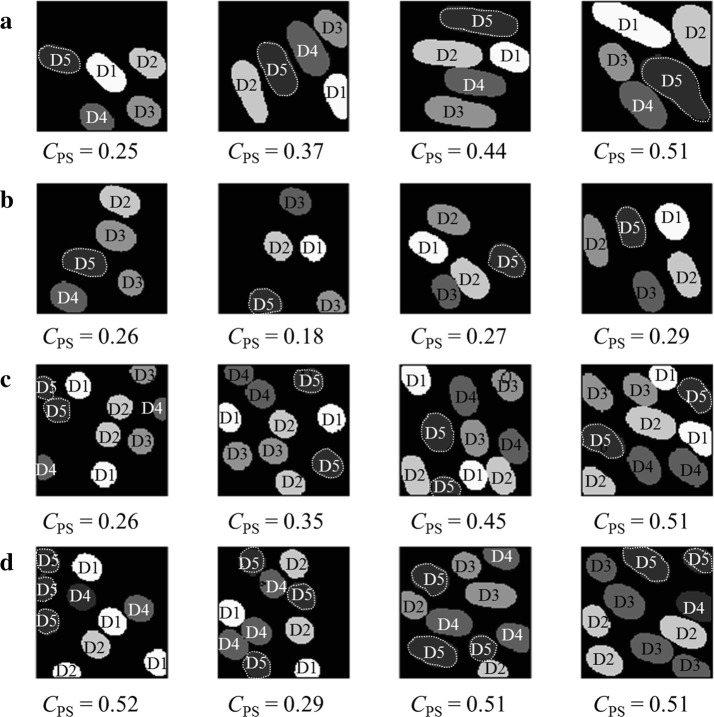
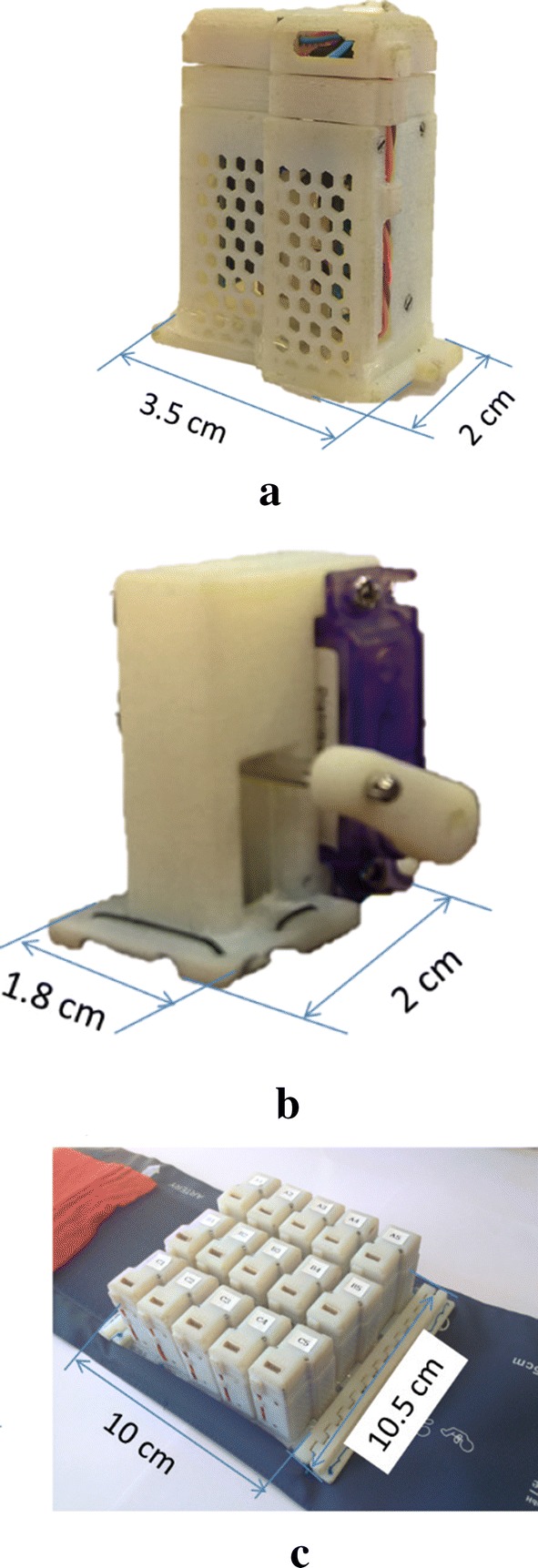
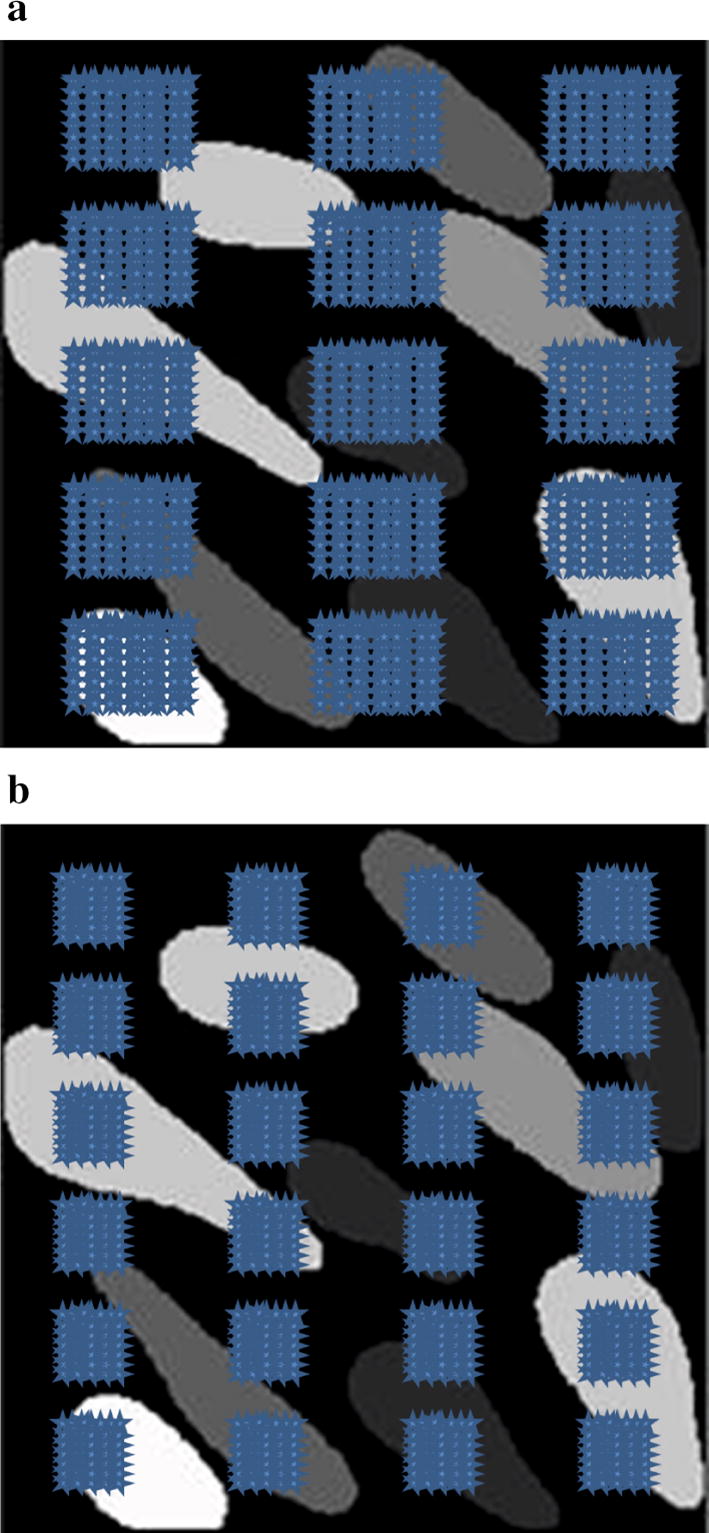
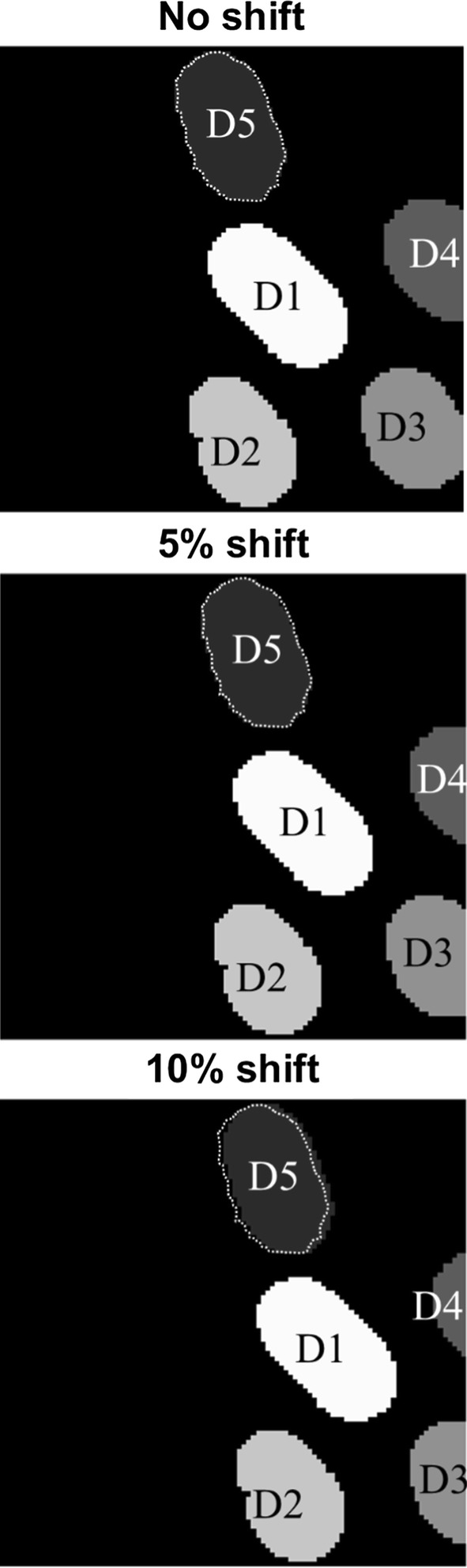
Methods: In this paper, automatic phantom map detection methods based on four decomposition support vector machine algorithms and three sampling methods are proposed, complemented by fuzzy logic and active learning strategies. The algorithms and methods are tested on two databases: the first one includes 400 generated phantom maps, whereby the phantom map generation algorithm was based on our observation of the phantom maps to ensure smooth phantom digit edges, variety, and representativeness. The second database includes five reported phantom map images and transformations thereof. The accuracy and training/ classification time of each algorithm using a dense stimulation array (with 100 [Formula: see text] 100 actuators) and two coarse stimulation arrays (with 3 [Formula: see text] 5 and 4 [Formula: see text] 6 actuators) are presented and compared.
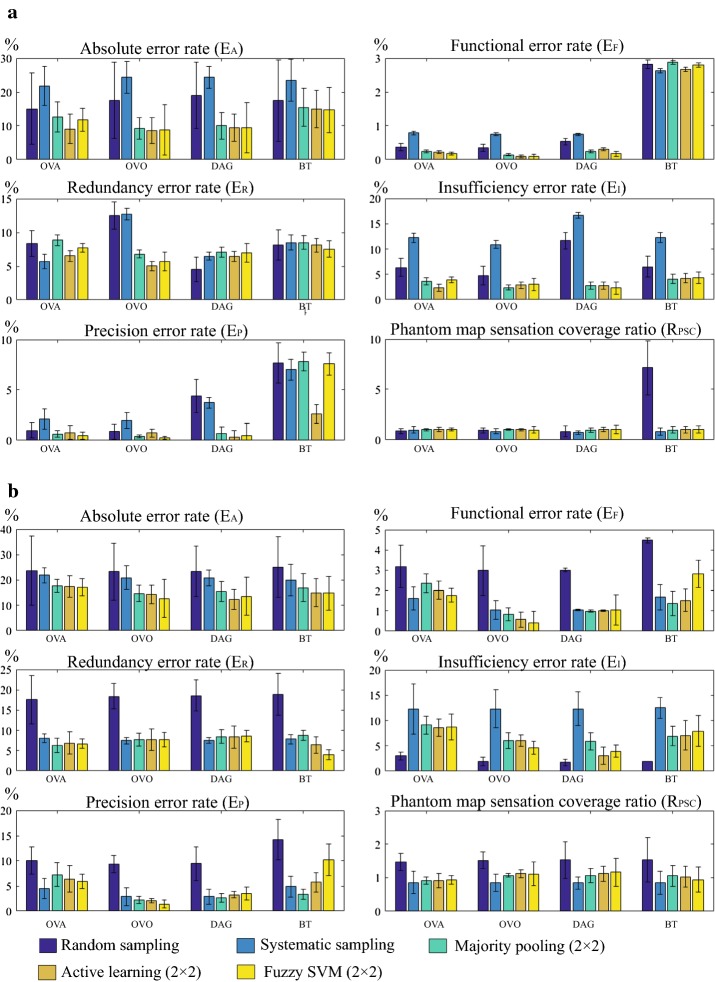
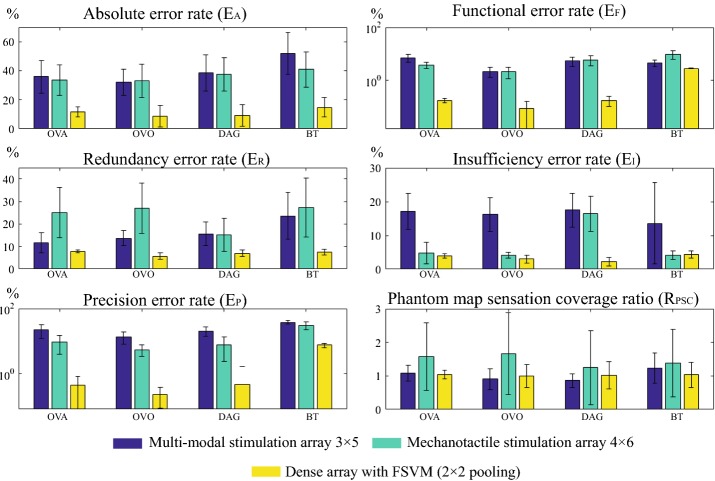
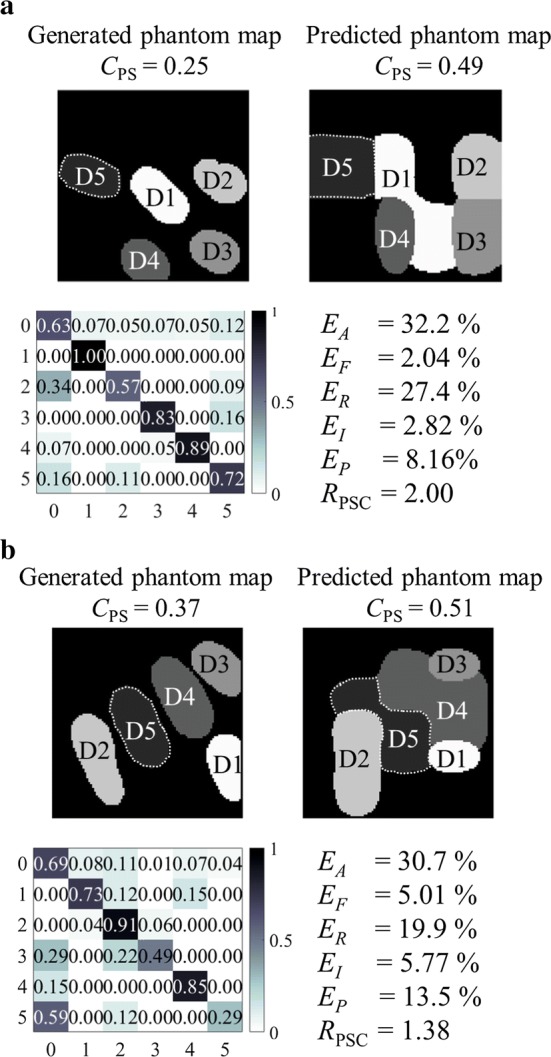
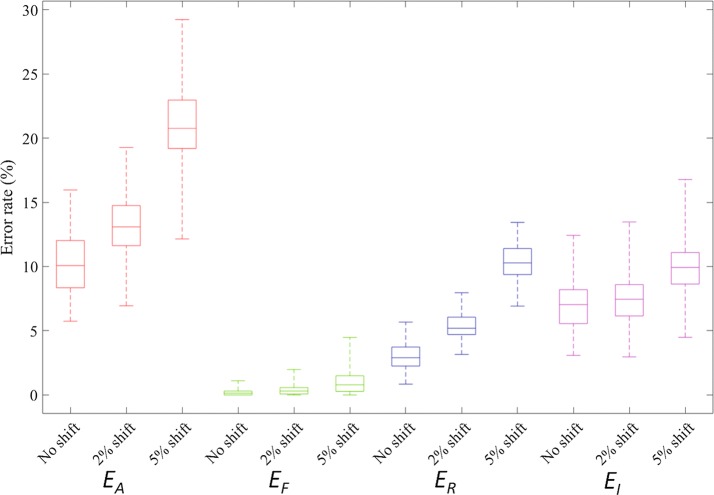
Results: Both generated and reported phantom map images share the same trends. Majority-pooling sampling effectively increases the training size, albeit introducing some noise, and thus produces the smallest error rates among the three proposed sampling methods. For different decomposition architectures, one-vs-one reduces unclassified regions and in general has higher classification accuracy than the other architectures. By introducing fuzzy logic to bias the penalty parameter, the influence of pooling-induced noise is reduced. Moreover, active learning with different strategies was also tested and shown to improve the accuracy by introducing more representative training samples. Overall, dense arrays employing one-vs-one fuzzy support vector machines with majority-pooling sampling have the smallest average absolute error rate (8.78% for generated phantom maps and 11.5% for reported and transformed phantom map images). The detection accuracy of coarse arrays was found to be significantly lower than for dense array.
Conclusions: The results demonstrate the effectiveness of support vector machines using a dense array in detecting refined phantom map shapes, whereas coarse arrays are unsuitable for this task. We therefore propose a two-step approach, using first a non-wearable dense array to detect an accurate phantom map shape, then to apply a wearable coarse stimulation array customized according to the detection results. The proposed methodology can be used as a tool for helping haptic feedback designers and for tracking the evolvement of phantom maps.
Keywords: Active learning; Hand amputee; Machine learning; Phantom map; Sensory feedback; Support vector machines.
Figures
References
-
- Otto Bock. http://www.ottobock.com/. Accessed 5 Oct 2016.
-
- Touch Bionics: I-Limb. http://www.touchbionics.com/products/active-prostheses/i-limb-ultra. Accessed 5 Oct 2016.
-
- Vincent systems. http://vincentsystems.de/en/. Accessed 5 Oct 2016.
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources
