

Additive manufacturing of three-dimensional (3D) microfluidic-based microelectromechanical systems (MEMS) for acoustofluidic applications
- PMID: 29897358
- PMCID: PMC6077993
- DOI: 10.1039/c8lc00427g
Additive manufacturing of three-dimensional (3D) microfluidic-based microelectromechanical systems (MEMS) for acoustofluidic applications
Abstract
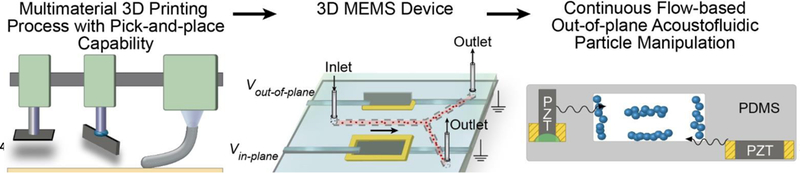
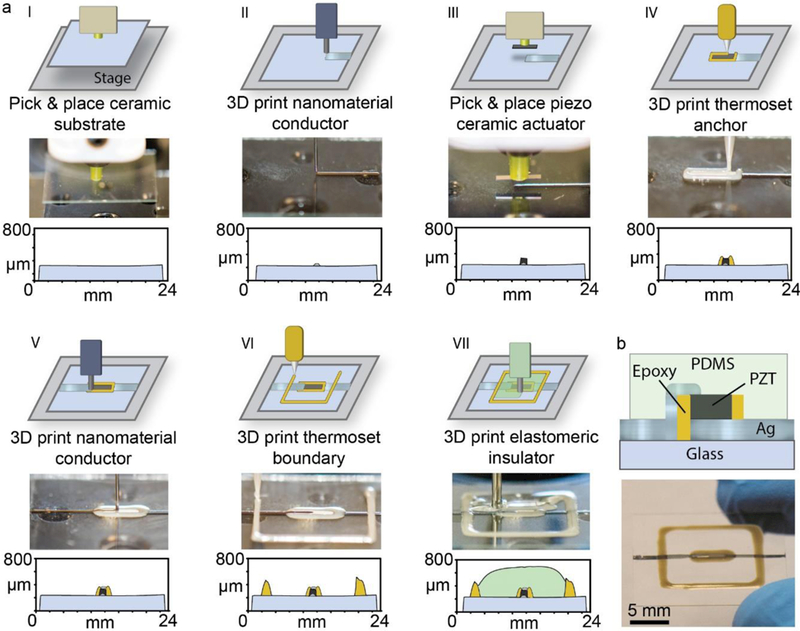
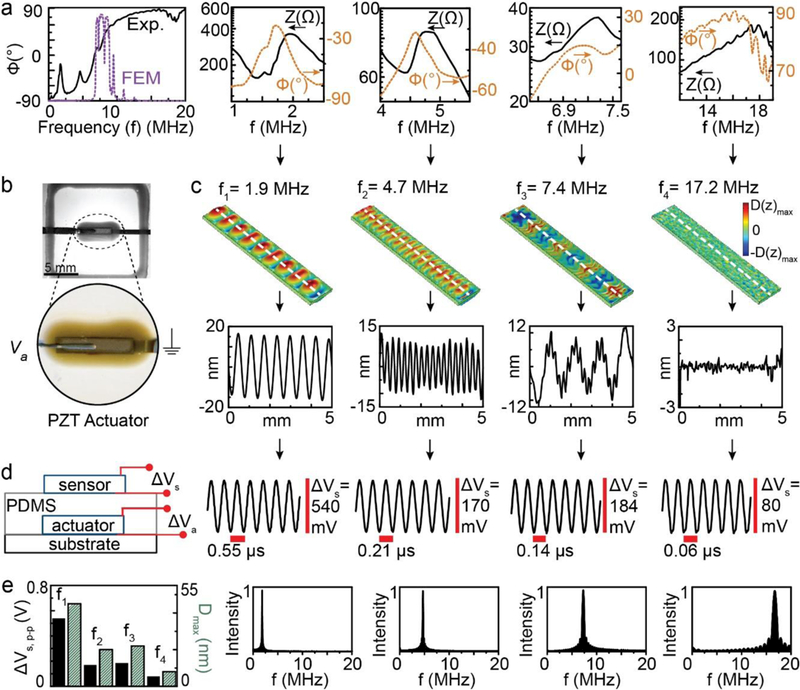
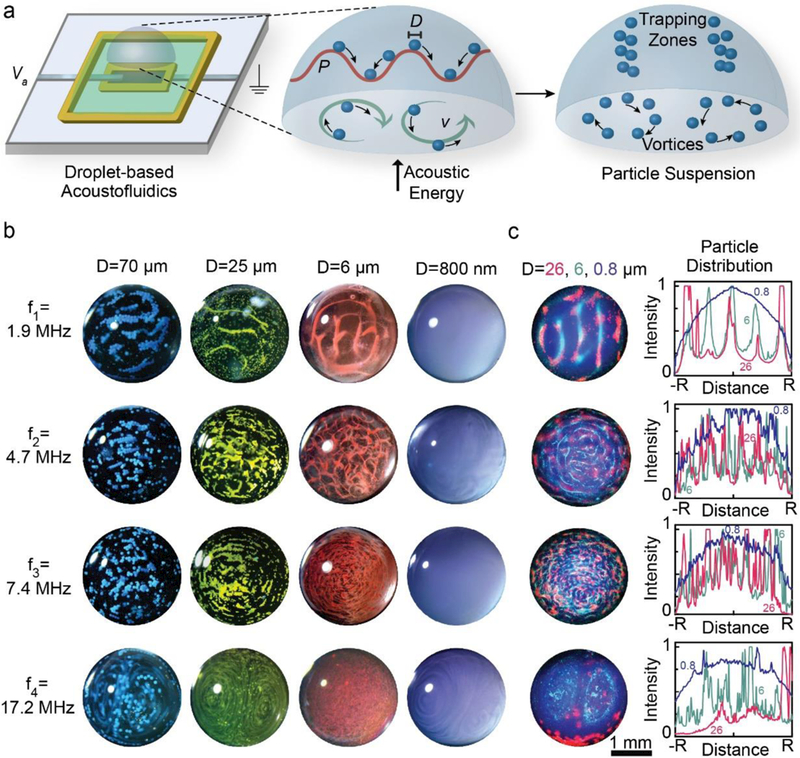
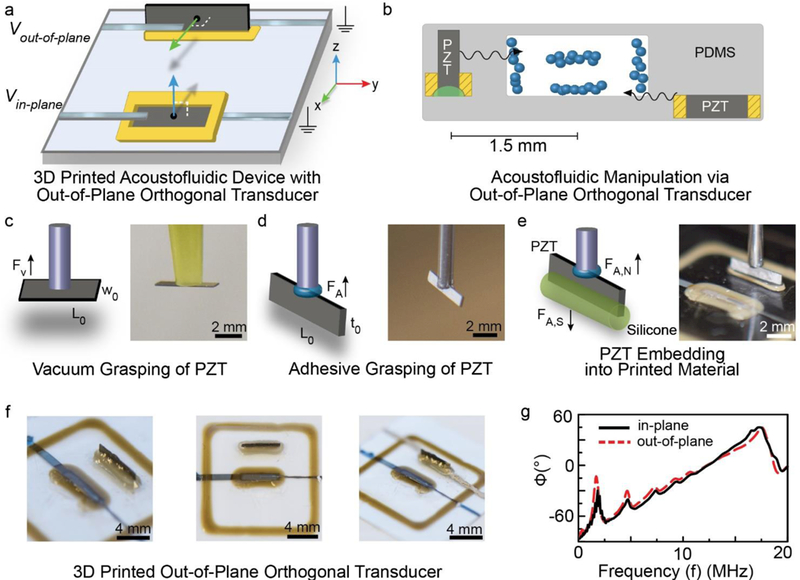
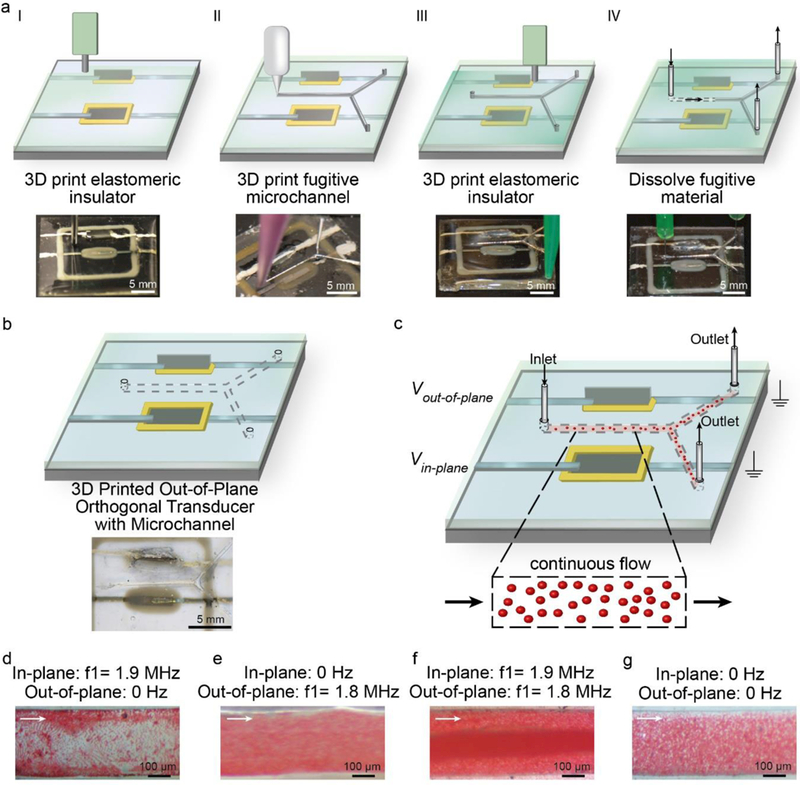
Three-dimensional (3D) printing now enables the fabrication of 3D structural electronics and microfluidics. Further, conventional subtractive manufacturing processes for microelectromechanical systems (MEMS) relatively limit device structure to two dimensions and require post-processing steps for interface with microfluidics. Thus, the objective of this work is to create an additive manufacturing approach for fabrication of 3D microfluidic-based MEMS devices that enables 3D configurations of electromechanical systems and simultaneous integration of microfluidics. Here, we demonstrate the ability to fabricate microfluidic-based acoustofluidic devices that contain orthogonal out-of-plane piezoelectric sensors and actuators using additive manufacturing. The devices were fabricated using a microextrusion 3D printing system that contained integrated pick-and-place functionality. Additively assembled materials and components included 3D printed epoxy, polydimethylsiloxane (PDMS), silver nanoparticles, and eutectic gallium-indium as well as robotically embedded piezoelectric chips (lead zirconate titanate (PZT)). Electrical impedance spectroscopy and finite element modeling studies showed the embedded PZT chips exhibited multiple resonant modes of varying mode shape over the 0-20 MHz frequency range. Flow visualization studies using neutrally buoyant particles (diameter = 0.8-70 μm) confirmed the 3D printed devices generated bulk acoustic waves (BAWs) capable of size-selective manipulation, trapping, and separation of suspended particles in droplets and microchannels. Flow visualization studies in a continuous flow format showed suspended particles could be moved toward or away from the walls of microfluidic channels based on selective actuation of in-plane or out-of-plane PZT chips. This work suggests additive manufacturing potentially provides new opportunities for the design and fabrication of acoustofluidic and microfluidic devices.
Conflict of interest statement
Conflicts of interest
There are no conflicts to declare.
Figures
Similar articles
-
High-resolution low-cost LCD 3D printing for microfluidics and organ-on-a-chip devices.Lab Chip. 2024 May 14;24(10):2774-2790. doi: 10.1039/d3lc01125a. Lab Chip. 2024. PMID: 38682609
-
3D Printed Microfluidics.Annu Rev Anal Chem (Palo Alto Calif). 2020 Jun 12;13(1):45-65. doi: 10.1146/annurev-anchem-091619-102649. Epub 2019 Dec 10. Annu Rev Anal Chem (Palo Alto Calif). 2020. PMID: 31821017 Free PMC article. Review.
-
Simple and inexpensive micromachined aluminum microfluidic devices for acoustic focusing of particles and cells.Anal Bioanal Chem. 2018 May;410(14):3385-3394. doi: 10.1007/s00216-018-1034-6. Epub 2018 Apr 12. Anal Bioanal Chem. 2018. PMID: 29651523 Free PMC article.
-
Three-Dimensional Printing Based Hybrid Manufacturing of Microfluidic Devices.J Nanotechnol Eng Med. 2015 May;6(2):021007. doi: 10.1115/1.4031231. Epub 2015 Sep 29. J Nanotechnol Eng Med. 2015. PMID: 27512530 Free PMC article.
-
Advancing Tissue Culture with Light-Driven 3D-Printed Microfluidic Devices.Biosensors (Basel). 2024 Jun 8;14(6):301. doi: 10.3390/bios14060301. Biosensors (Basel). 2024. PMID: 38920605 Free PMC article. Review.
Cited by
-
Additive Manufacturing Applications in Biosensors Technologies.Biosensors (Basel). 2024 Jan 23;14(2):60. doi: 10.3390/bios14020060. Biosensors (Basel). 2024. PMID: 38391979 Free PMC article. Review.
-
Electrochemical Biosensors for Pathogen Detection: An Updated Review.Biosensors (Basel). 2022 Oct 26;12(11):927. doi: 10.3390/bios12110927. Biosensors (Basel). 2022. PMID: 36354437 Free PMC article. Review.
-
3D Printed Multiplexed Competitive Migration Assays with Spatially Programmable Release Sources.Adv Biosyst. 2020 Jan;4(1):e1900225. doi: 10.1002/adbi.201900225. Epub 2019 Dec 5. Adv Biosyst. 2020. PMID: 32293127 Free PMC article.
-
Performance Analysis of a Microfluidic Pump Based on Combined Actuation of the Piezoelectric Effect and Liquid Crystal Backflow Effect.Micromachines (Basel). 2019 Aug 31;10(9):584. doi: 10.3390/mi10090584. Micromachines (Basel). 2019. PMID: 31480484 Free PMC article.
-
Design Aspects of Additive Manufacturing at Microscale: A Review.Micromachines (Basel). 2022 May 15;13(5):775. doi: 10.3390/mi13050775. Micromachines (Basel). 2022. PMID: 35630242 Free PMC article. Review.
References
-
- Kong YL, Tamargo IA, Kim H, Johnson BN, Gupta MK, Koh TW, Chin HA, Steingart DA, Rand BP and McAlpine MC, Nano Lett, 2014, 14, 7017–7023. - PubMed
-
- Singh M, Tong Y, Webster K, Cesewski E, Haring AP, Laheri S, Carswell B, O’Brien TJ, Aardema CH, Senger RS, Robertson JL and Johnson BN, Lab Chip, 2017, 17, 2561–2571. - PubMed
Publication types
MeSH terms
Substances
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources