

Randomized controlled trial of robot-assisted gait training with dorsiflexion assistance on chronic stroke patients wearing ankle-foot-orthosis
- PMID: 29914523
- PMCID: PMC6006663
- DOI: 10.1186/s12984-018-0394-7
Randomized controlled trial of robot-assisted gait training with dorsiflexion assistance on chronic stroke patients wearing ankle-foot-orthosis
Abstract
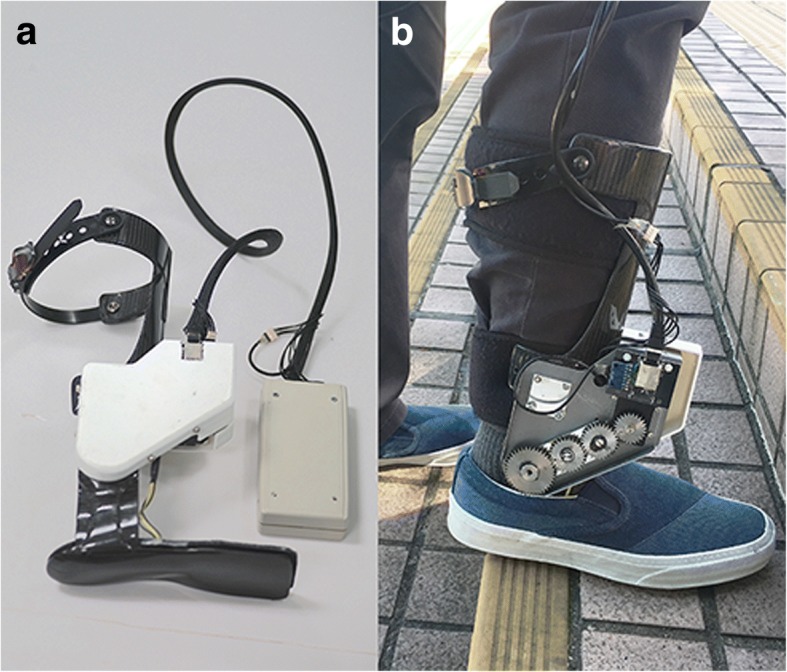
Background: Robot-assisted ankle-foot-orthosis (AFO) can provide immediate powered ankle assistance in post-stroke gait training. Our research team has developed a novel lightweight portable robot-assisted AFO which is capable of detecting walking intentions using sensor feedback of wearer's gait pattern. This study aims to investigate the therapeutic effects of robot-assisted gait training with ankle dorsiflexion assistance.
Methods: This was a double-blinded randomized controlled trial. Nineteen chronic stroke patients with motor impairment at ankle participated in 20-session robot-assisted gait training for about five weeks, with 30-min over-ground walking and stair ambulation practices. Robot-assisted AFO either provided active powered ankle assistance during swing phase in Robotic Group (n = 9), or torque impedance at ankle joint as passive AFO in Sham Group (n = 10). Functional assessments were performed before and after the 20-session gait training with 3-month Follow-up. Primary outcome measure was gait independency assessed by Functional Ambulatory Category (FAC). Secondary outcome measures were clinical scores including Fugl-Meyer Assessment (FMA), Modified Ashworth Scale (MAS), Berg Balance Scale (BBS), Timed 10-Meter Walk Test (10MWT), Six-minute Walk Test (SMWT), supplemented by gait analysis. All outcome measures were performed in unassisted gait after patients had taken off the robot-assisted AFO. Repeated-measures analysis of covariance was conducted to test the group differences referenced to clinical scores before training.
Results: After 20-session robot-assisted gait training with ankle dorsiflexion assistance, the active ankle assistance in Robotic Group induced changes in gait pattern with improved gait independency (all patients FAC ≥ 5 post-training and 3-month follow-up), motor recovery, walking speed, and greater confidence in affected side loading response (vertical ground reaction force + 1.49 N/kg, peak braking force + 0.24 N/kg) with heel strike instead of flat foot touch-down at initial contact (foot tilting + 1.91°). Sham Group reported reduction in affected leg range of motion (ankle dorsiflexion - 2.36° and knee flexion - 8.48°) during swing.
Conclusions: Robot-assisted gait training with ankle dorsiflexion assistance could improve gait independency and help stroke patients developing confidence in weight acceptance, but future development of robot-assisted AFO should consider more lightweight and custom-fit design.
Trial registration: ClinicalTrials.gov NCT02471248 . Registered 15 June 2015 retrospectively registered.
Keywords: Ankle foot orthosis; Exoskeletons; Gait training; Robotics; Stroke.
Conflict of interest statement
Ethics approval and consent to participate
The study is approved by The Joint Chinese University of Hong Kong-New Territories East Cluster Clinical Research Ethics Committee (The Joint CUHK-NTEC CREC) (CRE Ref. no. 2015.037-T). This RCT was designed following the principle of the Declaration of Helsinki. Written consent to participate in the experiment were obtained from all subjects recruited.
Consent for publication
The people with stroke in Fig. 1 have consented to the publication of the photograph.
Competing interests
Yeung LF, Ockenfeld C, Pang MK, Wai HW, and Tong KY are co-inventors of the Hong Kong Polytechnic University-held patent for the robot-assisted AFO used in this study. All authors, however, are of no financial relationship whatsoever for the submitted work with Rehab-Robotics Company Ltd., the company under license agreement with the University.
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Figures



References
Publication types
MeSH terms
Associated data
LinkOut - more resources
Full Text Sources
Other Literature Sources
Medical
