

Switching in Feedforward Control of Grip Force During Tool-Mediated Interaction With Elastic Force Fields
- PMID: 29930504
- PMCID: PMC5999723
- DOI: 10.3389/fnbot.2018.00031
Switching in Feedforward Control of Grip Force During Tool-Mediated Interaction With Elastic Force Fields
Abstract
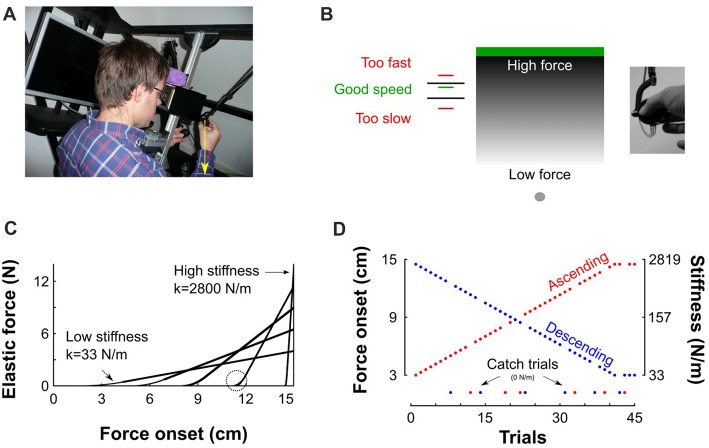
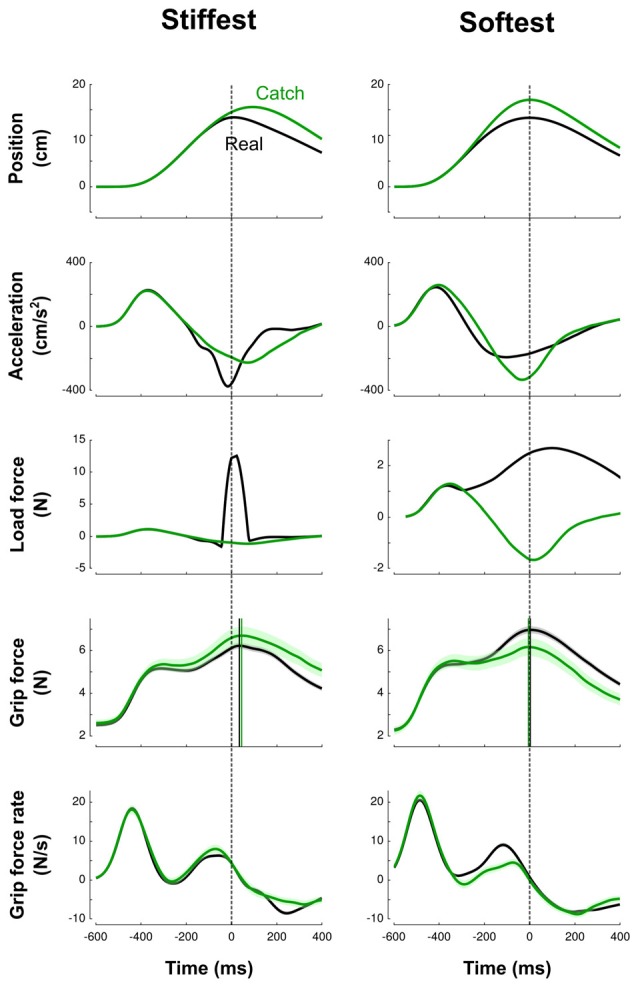
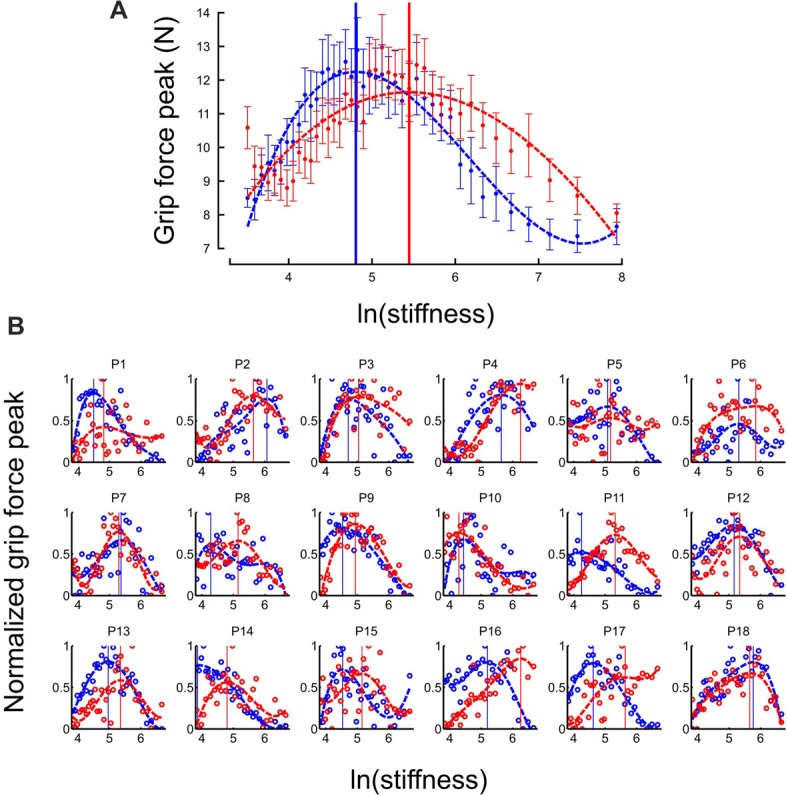
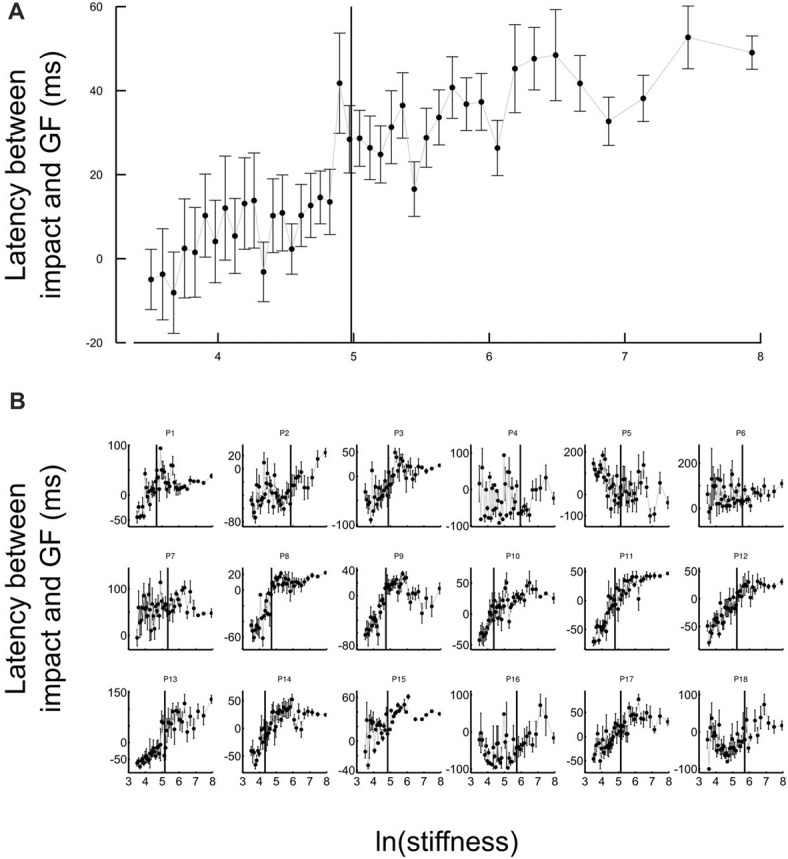
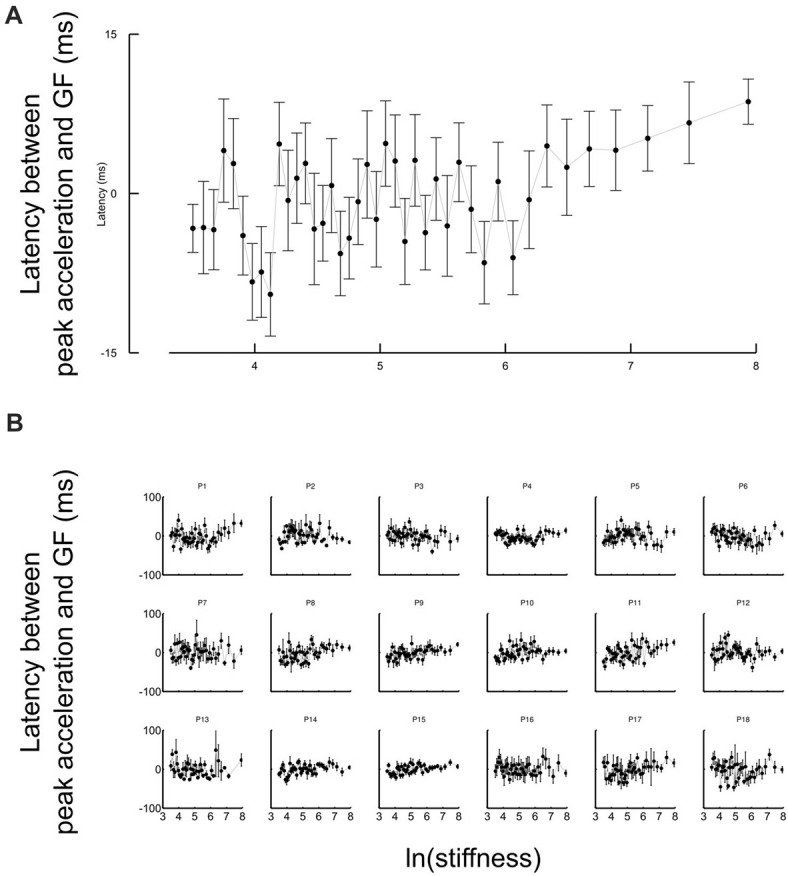
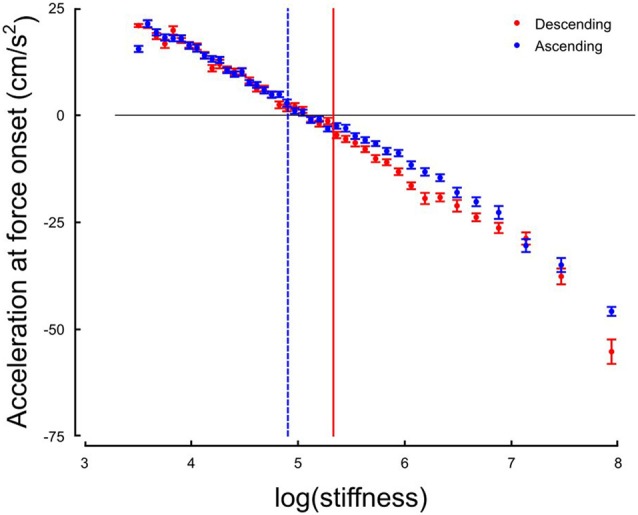
Switched systems are common in artificial control systems. Here, we suggest that the brain adopts a switched feedforward control of grip forces during manipulation of objects. We measured how participants modulated grip force when interacting with soft and rigid virtual objects when stiffness varied continuously between trials. We identified a sudden phase transition between two forms of feedforward control that differed in the timing of the synchronization between the anticipated load force and the applied grip force. The switch occurred several trials after a threshold stiffness level in the range 100-200 N/m. These results suggest that in the control of grip force, the brain acts as a switching control system. This opens new research questions as to the nature of the discrete state variables that drive the switching.
Keywords: grip force; internal model; phase transition; stiffness; uncertainty.
Figures
Similar articles
-
Grip Force Control During Virtual Interaction With Deformable and Rigid Objects Via a Haptic Gripper.IEEE Trans Haptics. 2021 Jul-Sep;14(3):564-576. doi: 10.1109/TOH.2021.3060507. Epub 2021 Sep 9. IEEE Trans Haptics. 2021. PMID: 33606636
-
Grip force preparation for collisions.Exp Brain Res. 2019 Oct;237(10):2585-2594. doi: 10.1007/s00221-019-05606-y. Epub 2019 Aug 1. Exp Brain Res. 2019. PMID: 31372687
-
Force feedback delay affects perception of stiffness but not action, and the effect depends on the hand used but not on the handedness.J Neurophysiol. 2018 Aug 1;120(2):781-794. doi: 10.1152/jn.00822.2017. Epub 2018 May 16. J Neurophysiol. 2018. PMID: 29766763
-
[Analysis of grip force during object manipulation. Method for the objective measurement of physiological normal and impaired hand function].Nervenarzt. 2004 Aug;75(8):725-33. doi: 10.1007/s00115-003-1676-1. Nervenarzt. 2004. PMID: 15042295 Review. German.
-
Objective evaluation of manual performance deficits in neurological movement disorders.Brain Res Rev. 2006 Jun;51(1):108-24. doi: 10.1016/j.brainresrev.2005.10.003. Epub 2005 Dec 13. Brain Res Rev. 2006. PMID: 16356552 Review.
Cited by
-
Evidence for an internal model of friction when controlling kinetic energy at impact to slide an object along a surface toward a target.PLoS One. 2022 Feb 24;17(2):e0264370. doi: 10.1371/journal.pone.0264370. eCollection 2022. PLoS One. 2022. PMID: 35202414 Free PMC article.
-
Stretching the skin immediately enhances perceived stiffness and gradually enhances the predictive control of grip force.Elife. 2020 Apr 15;9:e52653. doi: 10.7554/eLife.52653. Elife. 2020. PMID: 32292163 Free PMC article.
References
LinkOut - more resources
Full Text Sources
Other Literature Sources