

Balancing body ownership: Visual capture of proprioception and affectivity during vestibular stimulation
- PMID: 29940194
- PMCID: PMC6092558
- DOI: 10.1016/j.neuropsychologia.2018.06.020
Balancing body ownership: Visual capture of proprioception and affectivity during vestibular stimulation
Abstract
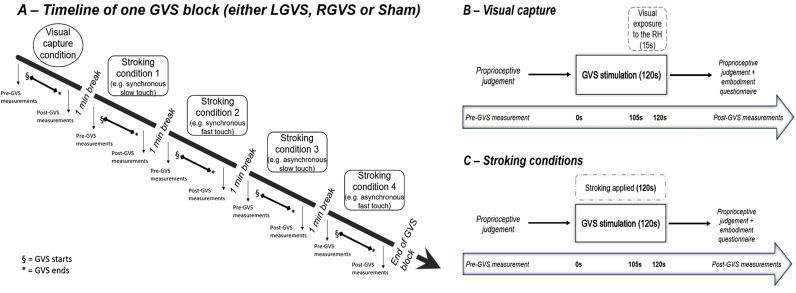
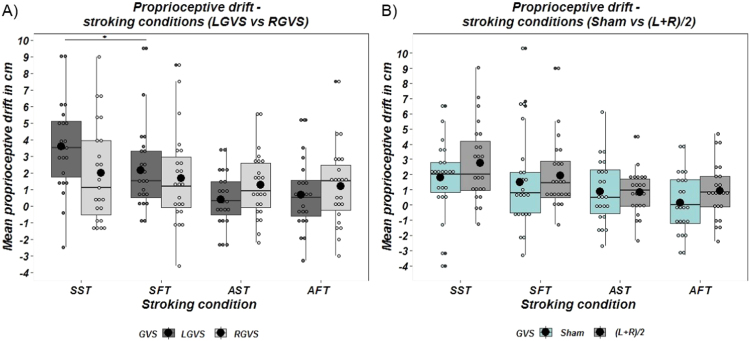
The experience of our body as our own (i.e. body ownership) involves integrating different sensory signals according to their contextual relevance (i.e. multisensory integration). Until recently, most studies of multisensory integration and body ownership concerned only vision, touch and proprioception; the role of other modalities, such as the vestibular system and interoception, has been neglected and remains poorly understood. In particular, no study to date has directly explored the combined effect of vestibular and interoceptive signals on body ownership. Here, we investigated for the first time how Galvanic Vestibular Stimulation (left, right, sham), tactile affectivity (a reclassified interoceptive modality manipulated by applying touch at C-tactile optimal versus non-optimal velocities), and their combination, influence proprioceptive and subjective measures of body ownership during a rubber hand illusion paradigm with healthy participants (N = 26). Our results show that vestibular stimulation (left GVS) significantly increased proprioceptive drift towards the rubber hand during mere visual exposure to the rubber hand. Moreover, it also enhanced participants' proprioceptive drift towards the rubber hand during manipulations of synchronicity and affective touch. These findings suggest that the vestibular system influences multisensory integration, possibly by re-weighting both the two-way relationship between proprioception and vision, as well as the three-way relationship between proprioception, vision and affective touch. We discuss these findings in relation to current predictive coding models of multisensory integration and body ownership.
Keywords: Affective touch; Bodily self; Body ownership; Multisensory integration; Vestibular stimulation.
Copyright © 2018 The Authors. Published by Elsevier Ltd.. All rights reserved.
Figures

References
-
- Baier B., Karnath H.O. Tight link between our sense of limb ownership and self-awareness of actions. Stroke. 2008;39(2):486–488. - PubMed
-
- Been G., Ngo T.T., Miller S.M., Fitzgerald P.B. The use of tDCS and CVS as methods of non-invasive brain stimulation. Brain Res. Rev. 2007;56:346–361. - PubMed
-
- Bense S., Stephan T., Yousry T.A., Brandt T., Dieterich M. Multisensory cortical signal increases and decreases during vestibular galvanic stimulation (fMRI) J. Neurophysiol. 2001;85(2):886–899. - PubMed
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
Other Literature Sources
Medical
