

Controllable water surface to underwater transition through electrowetting in a hybrid terrestrial-aquatic microrobot
- PMID: 29950597
- PMCID: PMC6021446
- DOI: 10.1038/s41467-018-04855-9
Controllable water surface to underwater transition through electrowetting in a hybrid terrestrial-aquatic microrobot
Abstract
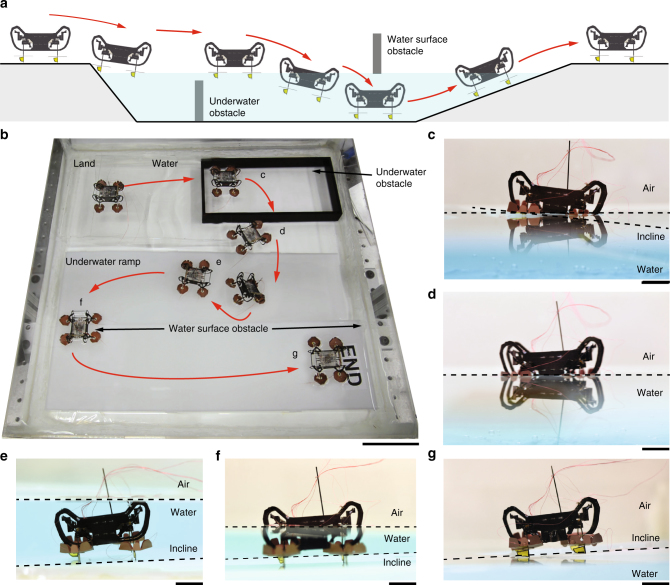
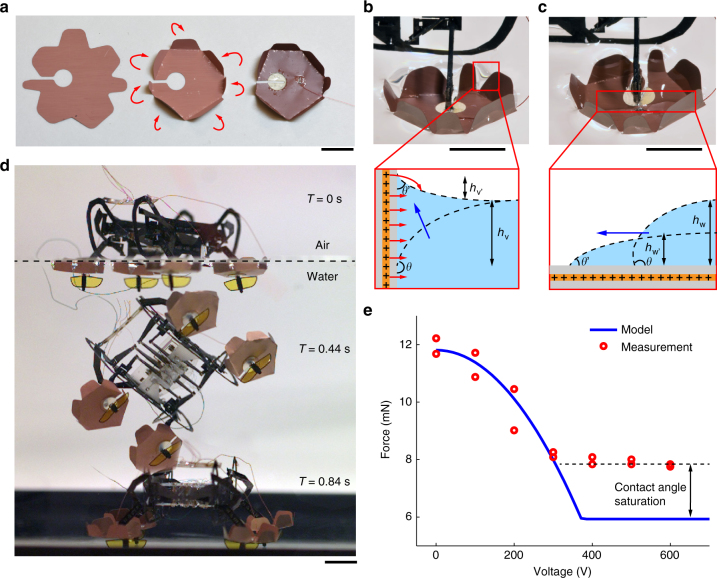
Several animal species demonstrate remarkable locomotive capabilities on land, on water, and under water. A hybrid terrestrial-aquatic robot with similar capabilities requires multimodal locomotive strategies that reconcile the constraints imposed by the different environments. Here we report the development of a 1.6 g quadrupedal microrobot that can walk on land, swim on water, and transition between the two. This robot utilizes a combination of surface tension and buoyancy to support its weight and generates differential drag using passive flaps to swim forward and turn. Electrowetting is used to break the water surface and transition into water by reducing the contact angle, and subsequently inducing spontaneous wetting. Finally, several design modifications help the robot overcome surface tension and climb a modest incline to transition back onto land. Our results show that microrobots can demonstrate unique locomotive capabilities by leveraging their small size, mesoscale fabrication methods, and surface effects.
Conflict of interest statement
The authors declare no competing interests.
Figures




References
-
- Glasheen J, McMahon T. A hydrodynamic model of locomotion in the basilisk lizard. Nature. 1996;380:340. doi: 10.1038/380340a0. - DOI
-
- Parker GH. The crawling of young loggerhead turtles toward the sea. J. Exp. Zool. A. Ecol. Genet Physiol. 1922;36:322–331.
-
- Bush JW, Hu DL, Prakash M. The integument of water-walking arthropods: form and function. Adv. Insect Physiol. 2007;34:117–192. doi: 10.1016/S0065-2806(07)34003-4. - DOI
-
- Duellman, W. E. & Trueb, L. Biology of amphibians. JHU press (1986).
Publication types
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources
