

Feature Representation and Data Augmentation for Human Activity Classification Based on Wearable IMU Sensor Data Using a Deep LSTM Neural Network
- PMID: 30200377
- PMCID: PMC6165524
- DOI: 10.3390/s18092892
Feature Representation and Data Augmentation for Human Activity Classification Based on Wearable IMU Sensor Data Using a Deep LSTM Neural Network
Abstract
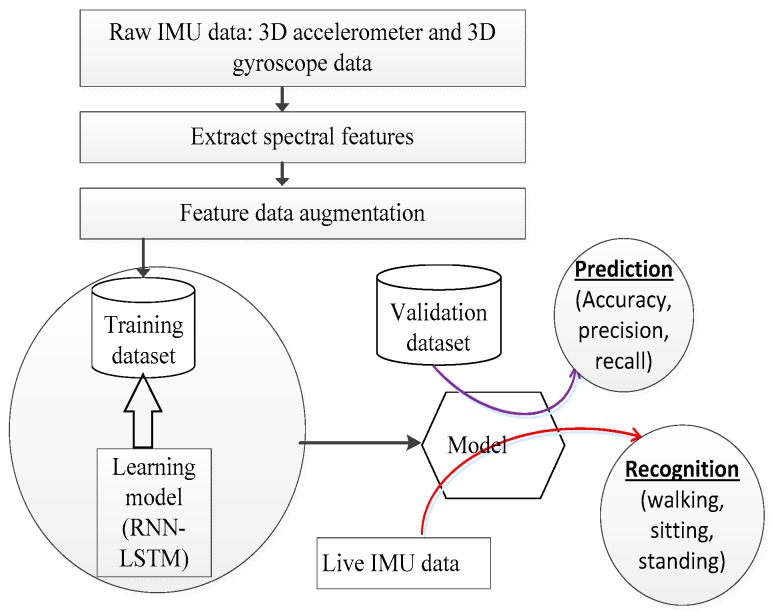
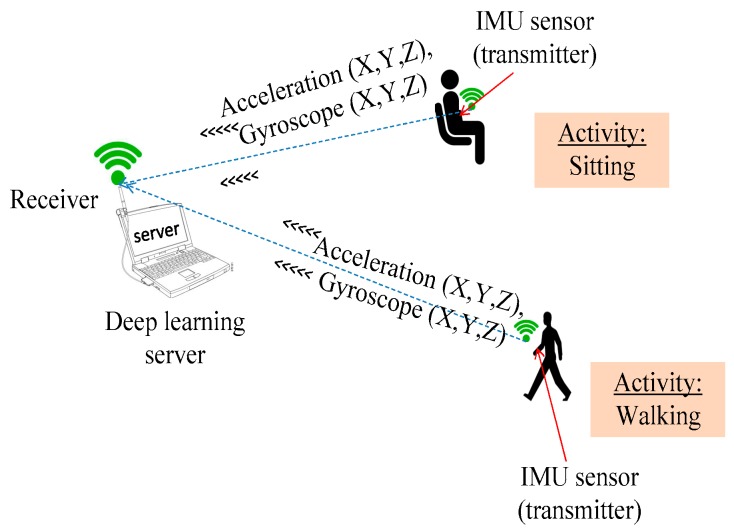
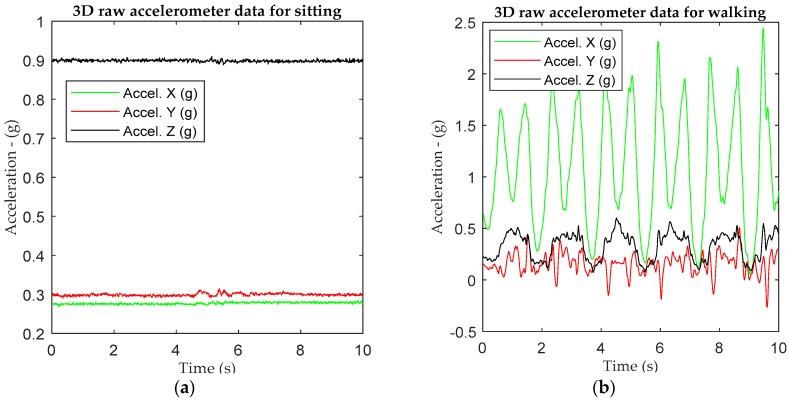
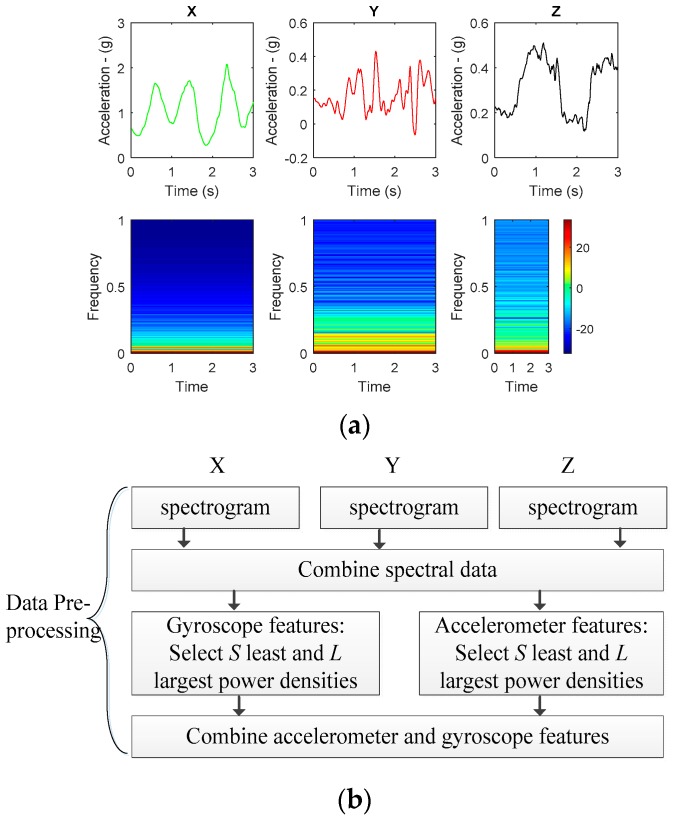
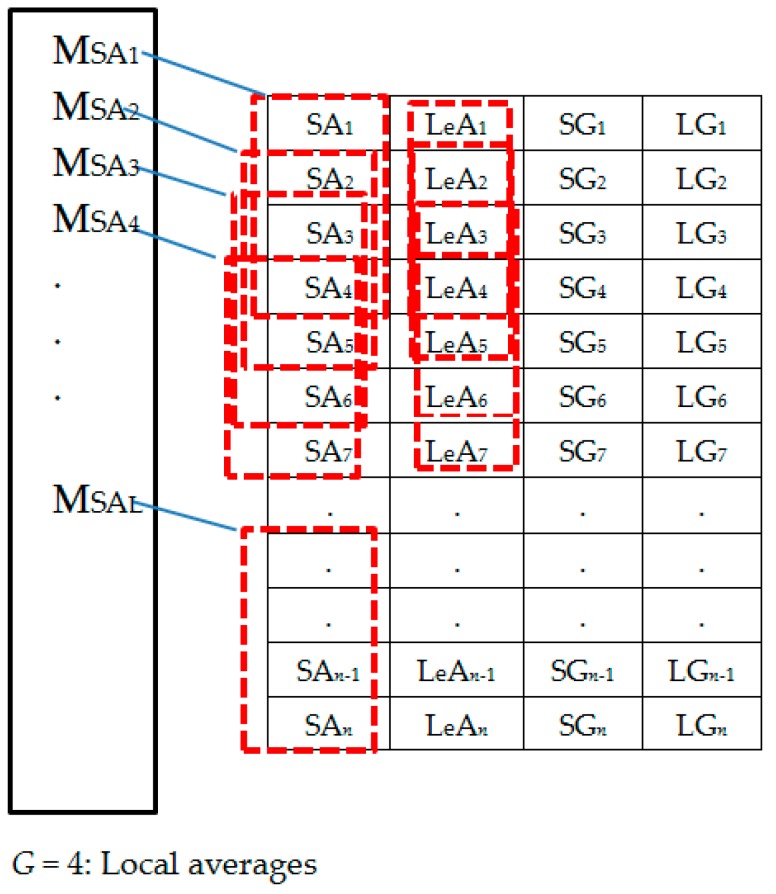
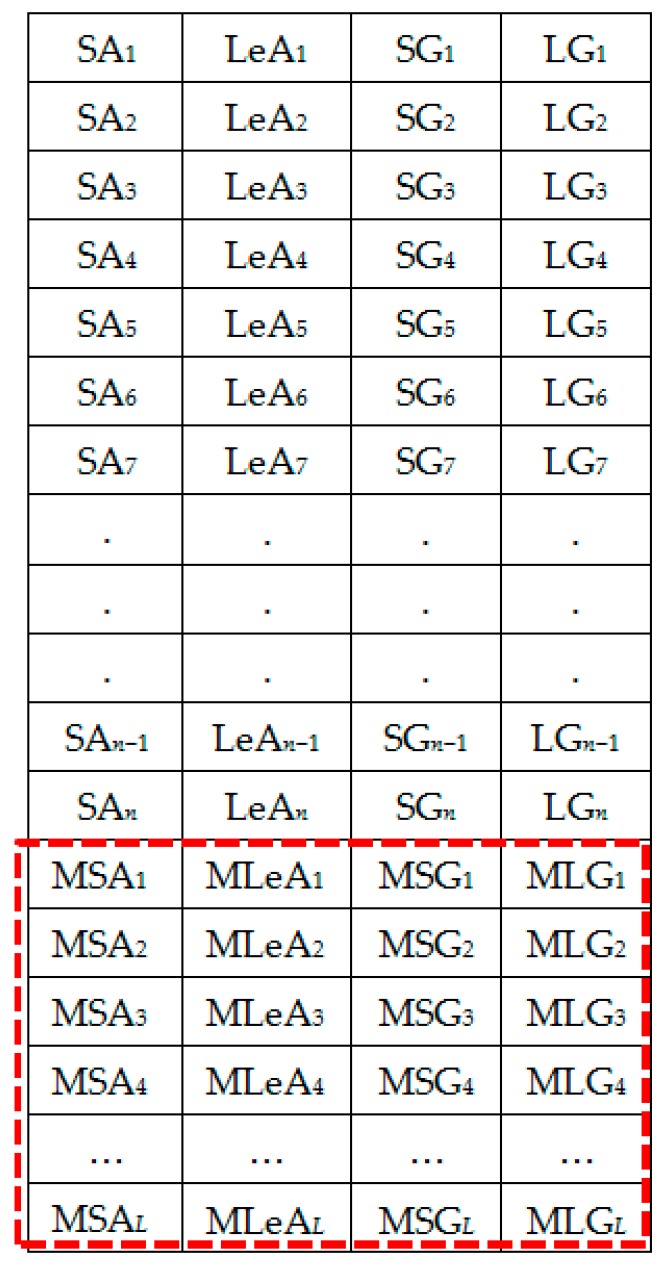
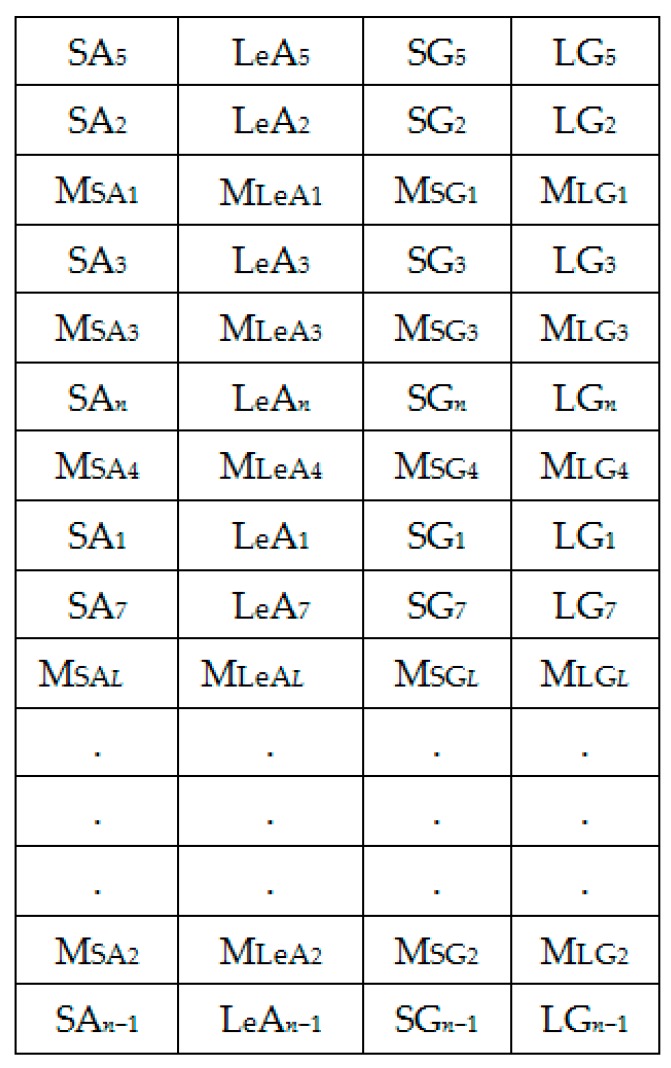
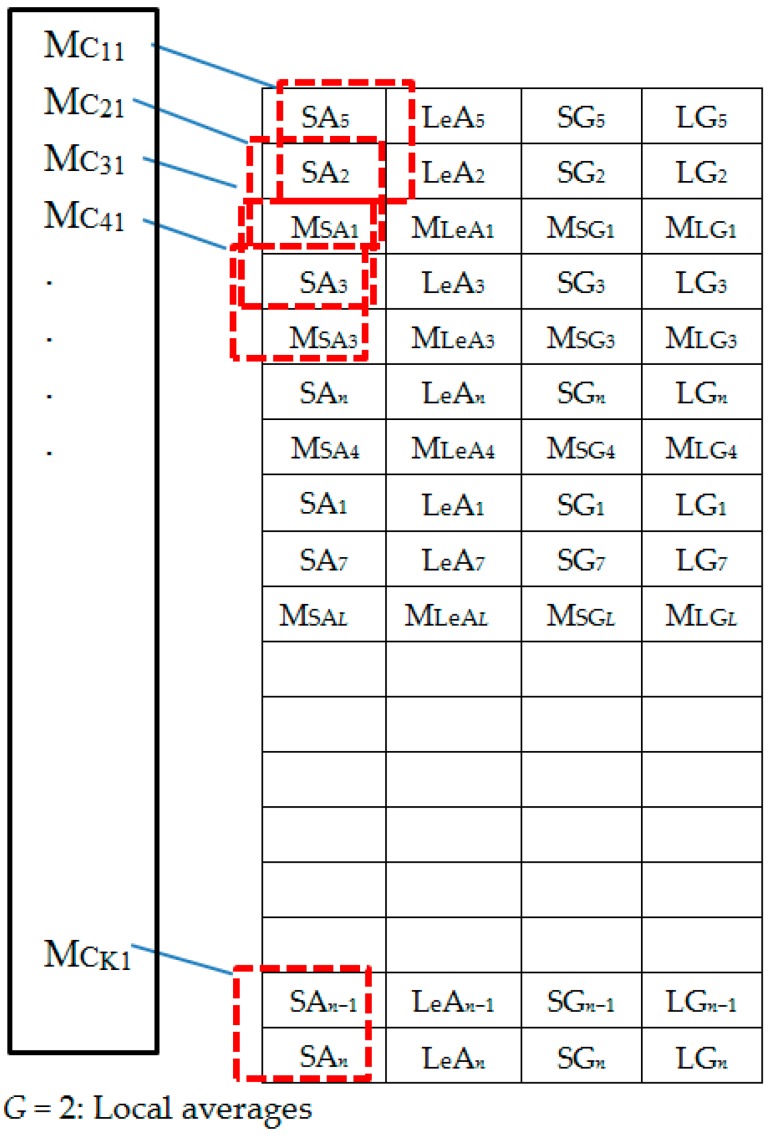
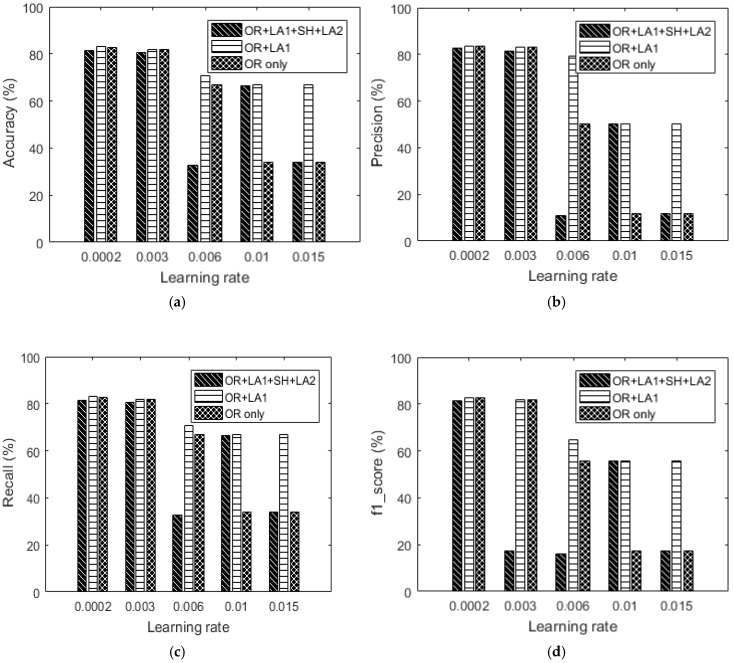
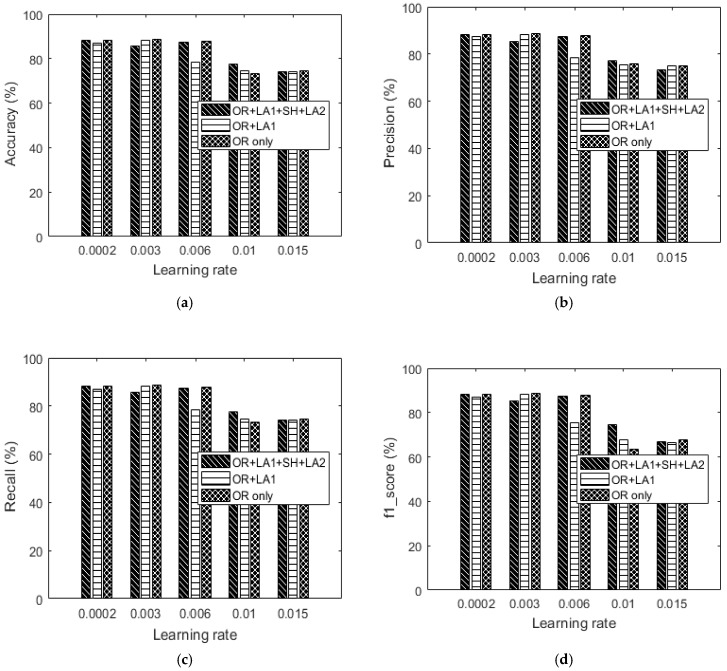
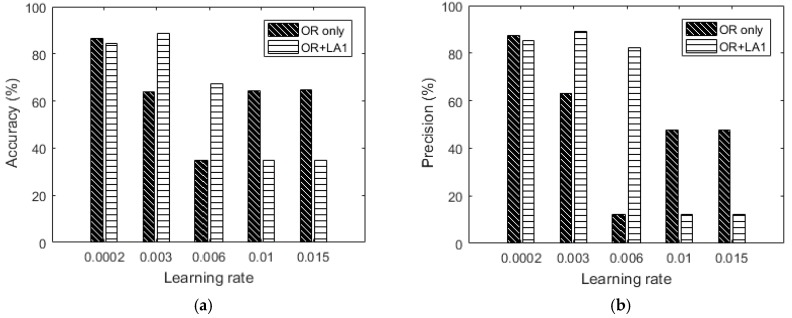
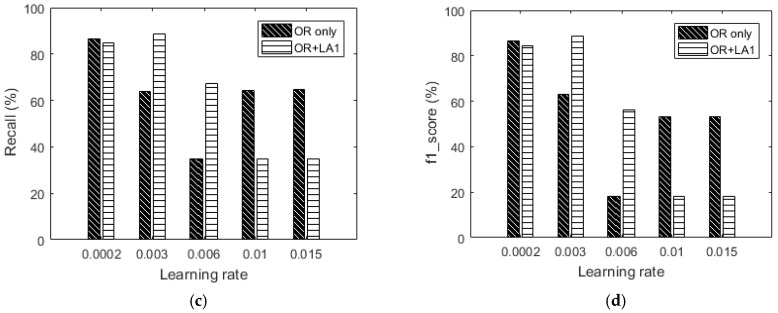
Wearable inertial measurement unit (IMU) sensors are powerful enablers for acquisition of motion data. Specifically, in human activity recognition (HAR), IMU sensor data collected from human motion are categorically combined to formulate datasets that can be used for learning human activities. However, successful learning of human activities from motion data involves the design and use of proper feature representations of IMU sensor data and suitable classifiers. Furthermore, the scarcity of labelled data is an impeding factor in the process of understanding the performance capabilities of data-driven learning models. To tackle these challenges, two primary contributions are in this article: first; by using raw IMU sensor data, a spectrogram-based feature extraction approach is proposed. Second, an ensemble of data augmentations in feature space is proposed to take care of the data scarcity problem. Performance tests were conducted on a deep long term short term memory (LSTM) neural network architecture to explore the influence of feature representations and the augmentations on activity recognition accuracy. The proposed feature extraction approach combined with the data augmentation ensemble produces state-of-the-art accuracy results in HAR. A performance evaluation of each augmentation approach is performed to show the influence on classification accuracy. Finally, in addition to using our own dataset, the proposed data augmentation technique is evaluated against the University of California, Irvine (UCI) public online HAR dataset and yields state-of-the-art accuracy results at various learning rates.
Keywords: data augmentation; deep learning; feature representation; human activity recognition; inertial measurement unit sensor; long short term memory.
Conflict of interest statement
The authors declare no conflict of interest.
Figures


Similar articles
-
Deep Convolutional and LSTM Recurrent Neural Networks for Multimodal Wearable Activity Recognition.Sensors (Basel). 2016 Jan 18;16(1):115. doi: 10.3390/s16010115. Sensors (Basel). 2016. PMID: 26797612 Free PMC article.
-
LSTM Networks Using Smartphone Data for Sensor-Based Human Activity Recognition in Smart Homes.Sensors (Basel). 2021 Feb 26;21(5):1636. doi: 10.3390/s21051636. Sensors (Basel). 2021. PMID: 33652697 Free PMC article.
-
Sensor Data Acquisition and Multimodal Sensor Fusion for Human Activity Recognition Using Deep Learning.Sensors (Basel). 2019 Apr 10;19(7):1716. doi: 10.3390/s19071716. Sensors (Basel). 2019. PMID: 30974845 Free PMC article.
-
Wearable Sensor-Based Human Activity Recognition in the Smart Healthcare System.Comput Intell Neurosci. 2022 Feb 24;2022:1391906. doi: 10.1155/2022/1391906. eCollection 2022. Comput Intell Neurosci. 2022. PMID: 35251142 Free PMC article. Review.
-
Deep Learning in Human Activity Recognition with Wearable Sensors: A Review on Advances.Sensors (Basel). 2022 Feb 14;22(4):1476. doi: 10.3390/s22041476. Sensors (Basel). 2022. PMID: 35214377 Free PMC article. Review.
Cited by
-
Augmented drug combination dataset to improve the performance of machine learning models predicting synergistic anticancer effects.Res Sq [Preprint]. 2023 Oct 28:rs.3.rs-3481858. doi: 10.21203/rs.3.rs-3481858/v1. Res Sq. 2023. Update in: Sci Rep. 2024 Jan 18;14(1):1668. doi: 10.1038/s41598-024-51940-9. PMID: 37961281 Free PMC article. Updated. Preprint.
-
Using Recurrent Neural Networks to Compare Movement Patterns in ADHD and Normally Developing Children Based on Acceleration Signals from the Wrist and Ankle.Sensors (Basel). 2019 Jul 3;19(13):2935. doi: 10.3390/s19132935. Sensors (Basel). 2019. PMID: 31277297 Free PMC article.
-
A Deep Neural Network-Based Method for Early Detection of Osteoarthritis Using Statistical Data.Int J Environ Res Public Health. 2019 Apr 10;16(7):1281. doi: 10.3390/ijerph16071281. Int J Environ Res Public Health. 2019. PMID: 30974803 Free PMC article.
-
Counting Finger and Wrist Movements Using Only a Wrist-Worn, Inertial Measurement Unit: Toward Practical Wearable Sensing for Hand-Related Healthcare Applications.Sensors (Basel). 2023 Jun 18;23(12):5690. doi: 10.3390/s23125690. Sensors (Basel). 2023. PMID: 37420857 Free PMC article.
-
Human Activity Recognition using Inertial, Physiological and Environmental Sensors: A Comprehensive Survey.IEEE Access. 2020;8:210816-210836. doi: 10.1109/access.2020.3037715. Epub 2020 Nov 16. IEEE Access. 2020. PMID: 33344100 Free PMC article.
References
-
- Debes C., Merentitis A., Sukhanov S., Niessen M., Frangiadakis N., Bauer A. Monitoring activities of daily living in smart homes: Understanding human behavior. IEEE Signal Process. Mag. 2016;33:81–94. doi: 10.1109/MSP.2015.2503881. - DOI
-
- Reiss A., Stricker D. Introducing a new benchmarked dataset for activity monitoring; Proceedings of the 2012 16th International Symposium on Wearable Computers (ISWC); Newcastle, UK. 18–22 June 2012; pp. 108–109.
-
- Sukkarieh S., Nebot E.M., Durrant-Whyte H.F. A high integrity IMU/GPS navigation loop for autonomous land vehicle applications. IEEE Trans. Robot. Autom. 1999;15:572–578. doi: 10.1109/70.768189. - DOI
-
- Jiménez A.R., Seco F., Prieto J.C., Guevara J. Indoor pedestrian navigation using an INS/EKF framework for yaw drift reduction and a foot-mounted IMU; Proceedings of the 2010 7th Workshop on Positioning Navigation and Communication (WPNC); Dresden, Germany. 11–12 March 2010; pp. 135–143.
-
- Ojeda L., Borenstein J. Non-GPS navigation for security personnel and first responders. J. Navig. 2007;60:391–407. doi: 10.1017/S0373463307004286. - DOI
MeSH terms
LinkOut - more resources
Full Text Sources
Other Literature Sources
Miscellaneous
