

Fractional-Order PID Control Strategy on Hydraulic-Loading System of Typical Electromechanical Platform
- PMID: 30201892
- PMCID: PMC6165011
- DOI: 10.3390/s18093024
Fractional-Order PID Control Strategy on Hydraulic-Loading System of Typical Electromechanical Platform
Abstract
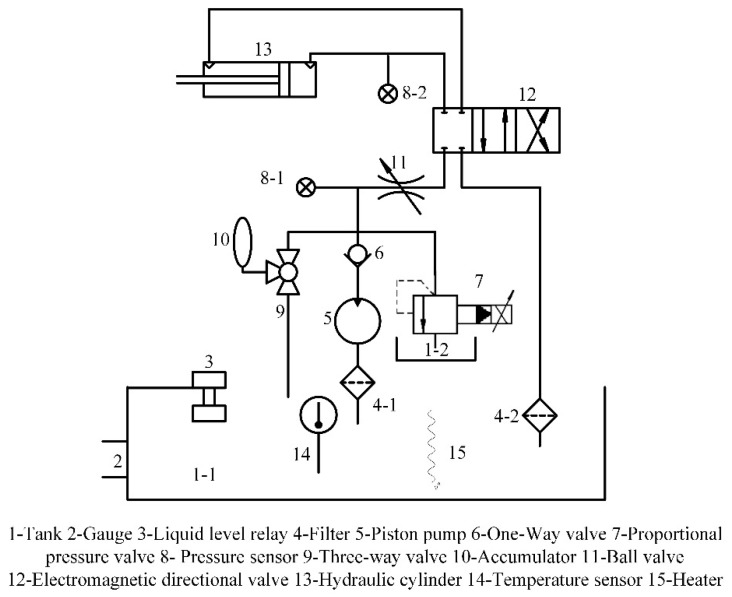
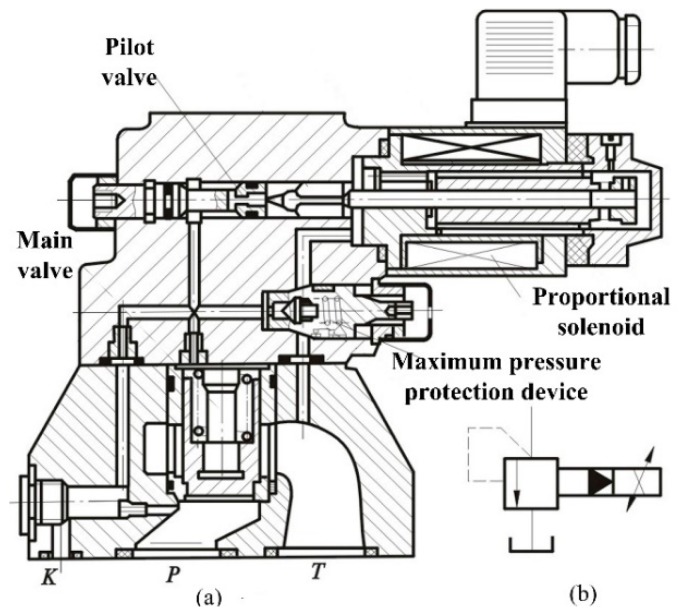
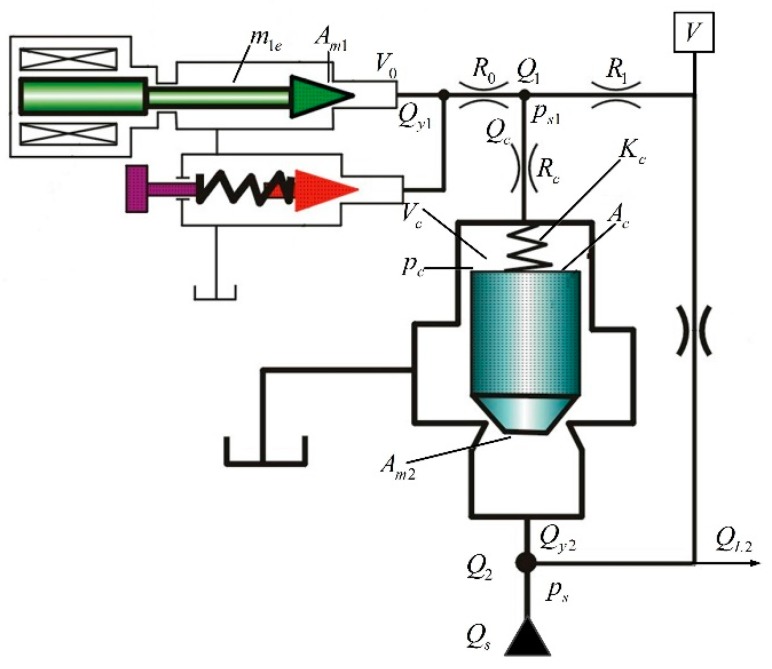
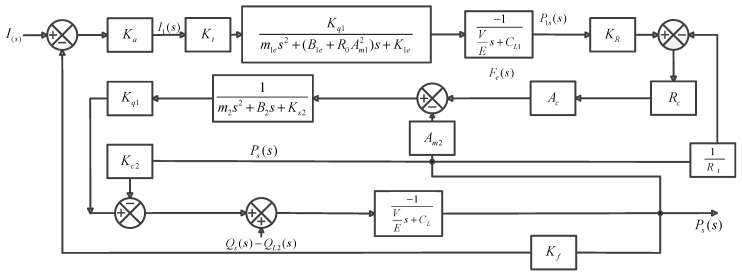
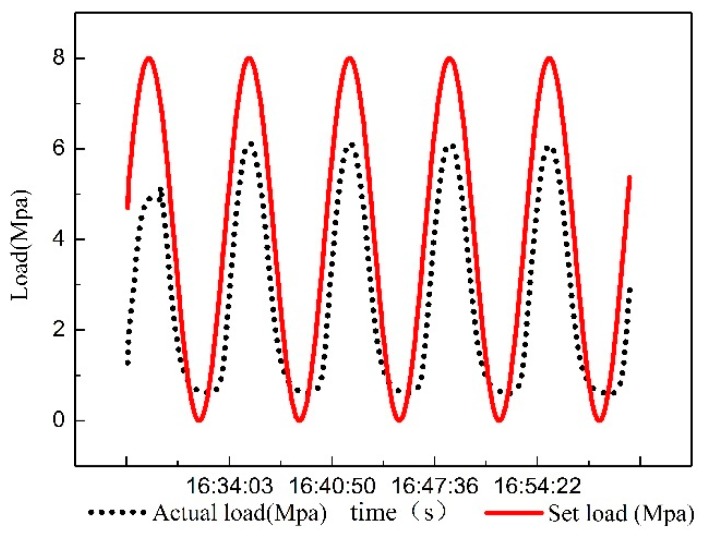
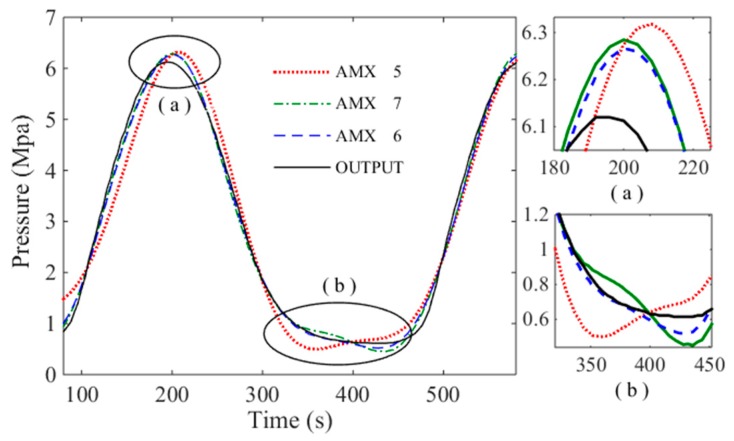
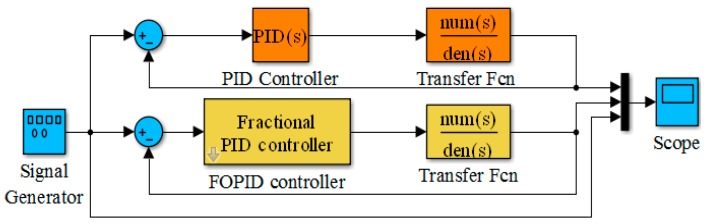
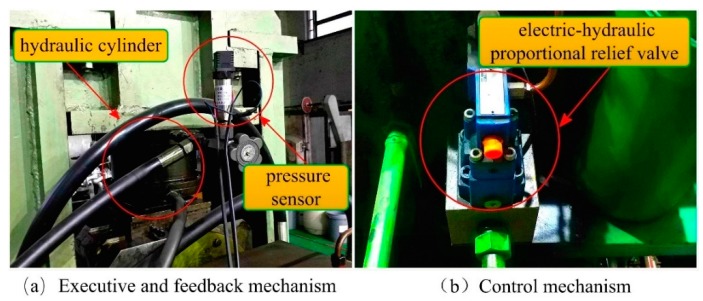
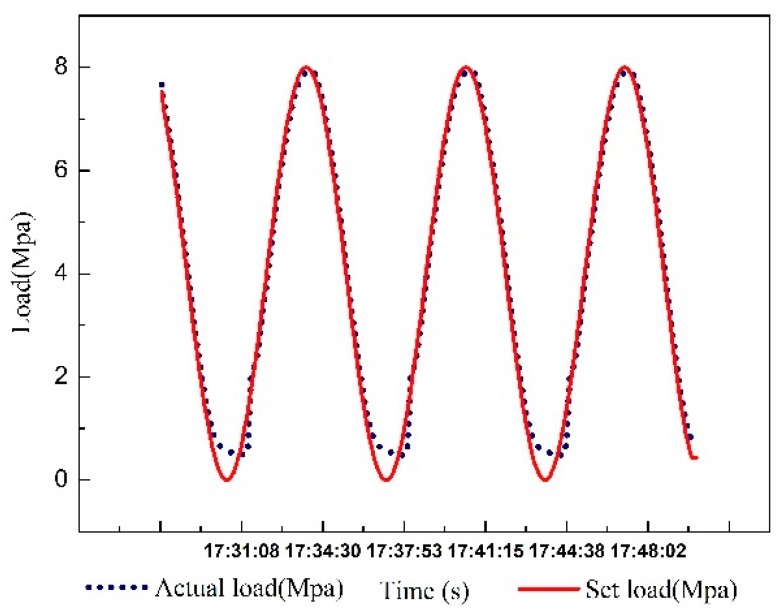
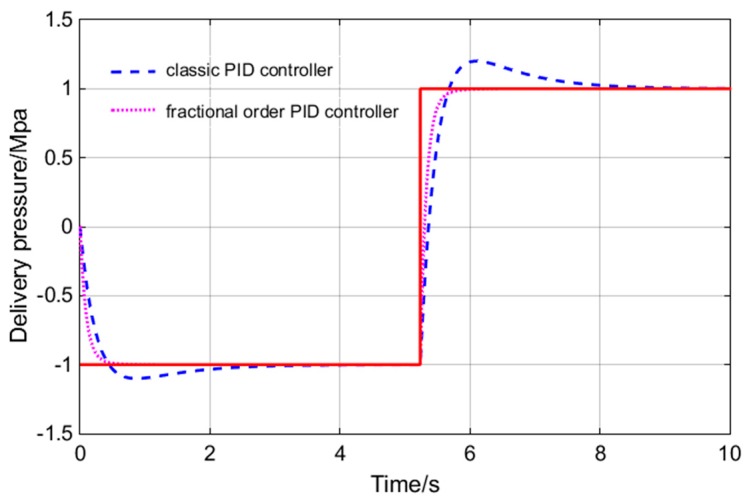
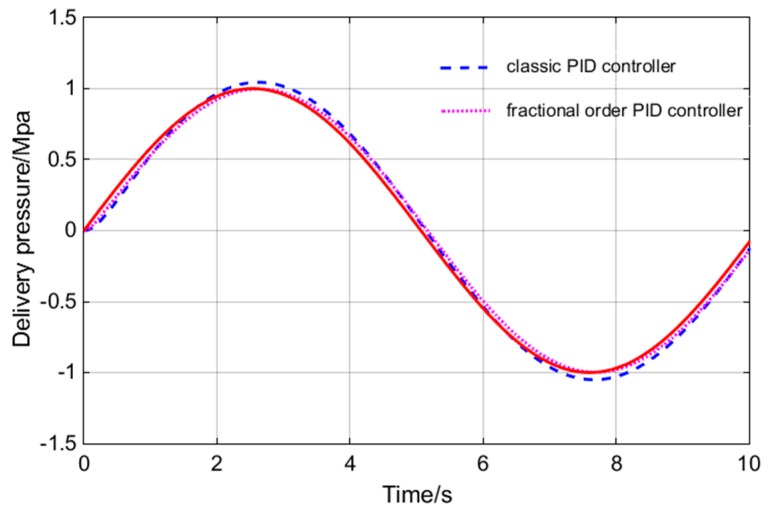
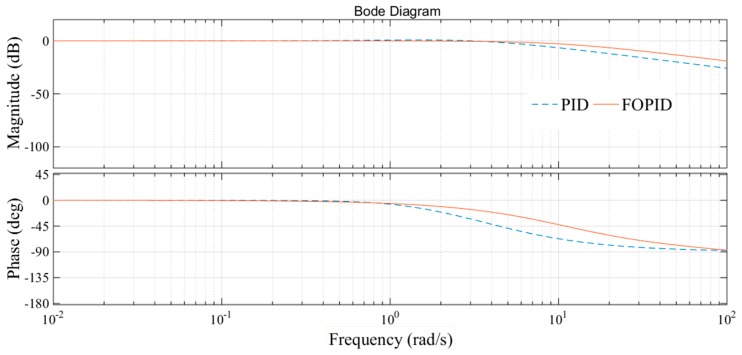
In this paper, a control method for a hydraulic loading system of an electromechanical platform based on a fractional-order PID (Proportion-Integration-Differentiation) controller is proposed, which is used to drive the loading system of a mechatronic journal test rig. The mathematical model of the control system is established according to the principle of the electro-hydraulic system. Considering the indetermination of model parameters, the method of parameter identification was used to verify the rationality of the theoretical model. In order to improve the control precision of the hydraulic loading system, the traditional PID controller and fractional-order PID controller are designed by selecting appropriate tuning parameters. Their control performances are analyzed in frequency domain and time domain, respectively. The results show that the fractional-order PID controller has better control effect. By observing the actual control effect of the fractional-order PID controller on the journal test rig, the effectiveness of this control algorithm is verified.
Keywords: electro-hydraulic system; fractional-order PID controller; journal bearing test rig; system identification.
Conflict of interest statement
The authors declare no conflicts of interest.
Figures

Similar articles
-
Optimized PID Controller Based on Beetle Antennae Search Algorithm for Electro-Hydraulic Position Servo Control System.Sensors (Basel). 2019 Jun 18;19(12):2727. doi: 10.3390/s19122727. Sensors (Basel). 2019. PMID: 31216632 Free PMC article.
-
Parameters identification and trajectory control for a hydraulic system.ISA Trans. 2019 Sep;92:228-240. doi: 10.1016/j.isatra.2019.02.022. Epub 2019 Feb 23. ISA Trans. 2019. PMID: 30827709
-
Design of a fractional order PID controller using GBMO algorithm for load-frequency control with governor saturation consideration.ISA Trans. 2016 Sep;64:56-66. doi: 10.1016/j.isatra.2016.04.021. Epub 2016 May 9. ISA Trans. 2016. PMID: 27172840
-
A novel interval type-2 fractional order fuzzy PID controller: Design, performance evaluation, and its optimal time domain tuning.ISA Trans. 2017 May;68:251-275. doi: 10.1016/j.isatra.2017.03.022. Epub 2017 Mar 31. ISA Trans. 2017. PMID: 28372800
-
2DOF multi-objective optimal tuning of disturbance reject fractional order PIDA controllers according to improved consensus oriented random search method.J Adv Res. 2020 Apr 4;25:159-170. doi: 10.1016/j.jare.2020.03.008. eCollection 2020 Sep. J Adv Res. 2020. PMID: 32922983 Free PMC article. Review.
Cited by
-
Subdiffusive Source Sensing by a Regional Detection Method.Sensors (Basel). 2019 Aug 10;19(16):3504. doi: 10.3390/s19163504. Sensors (Basel). 2019. PMID: 31405156 Free PMC article.
-
Improving Mobile Robot Maneuver Performance Using Fractional-Order Controller.Sensors (Basel). 2023 Mar 16;23(6):3191. doi: 10.3390/s23063191. Sensors (Basel). 2023. PMID: 36991899 Free PMC article.
-
Design and fault diagnosis of DCS sintering furnace's temperature control system for edge computing.PLoS One. 2021 Jul 6;16(7):e0253246. doi: 10.1371/journal.pone.0253246. eCollection 2021. PLoS One. 2021. PMID: 34228752 Free PMC article.
References
-
- Elbayomy K.M., Jiao Z., Zhang H. PID Controller Optimization by GA and Its Performances on the Electro-Hydraulic Servo Control System. Chin. J. Aeronaut. 2008;21:378–384. doi: 10.1016/S1000-9361(08)60049-7. - DOI
-
- Guan C., Pan S. Adaptive sliding mode control of electro-hydraulic system with nonlinear unknown parameters. Control Theory Appl. 2008;16:1275–1284. doi: 10.1016/j.conengprac.2008.02.002. - DOI
-
- Toscano R. A simple robust PI/PID controller design via numerical optimization approach. J. Process Control. 2005;15:81–88. doi: 10.1016/j.jprocont.2004.03.005. - DOI
-
- Mohanty A., Yao B. Indirect Adaptive Robust Control of Hydraulic Manipulators with Accurate Parameter Estimates. IEEE Trans. Control Syst. Technol. 2011;19:567–575. doi: 10.1109/TCST.2010.2048569. - DOI
-
- Yang G., Yao J., Le G., Ma D. Adaptive integral robust control of hydraulic systems with asymptotic tracking. Mechatronics. 2016;40:78–86. doi: 10.1016/j.mechatronics.2016.10.007. - DOI
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources
