

Using a robotic fish to investigate individual differences in social responsiveness in the guppy
- PMID: 30225087
- PMCID: PMC6124066
- DOI: 10.1098/rsos.181026
Using a robotic fish to investigate individual differences in social responsiveness in the guppy
Abstract
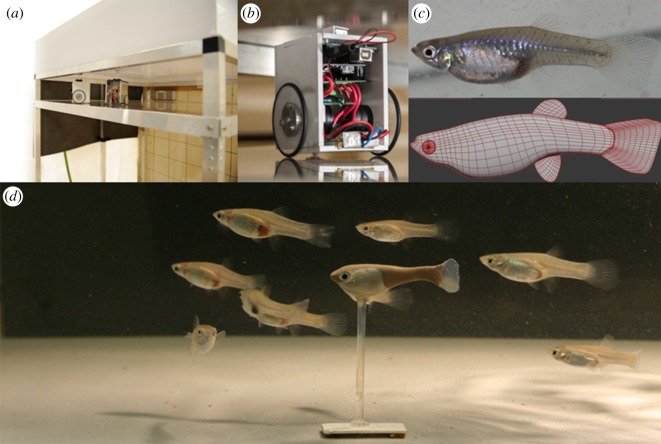
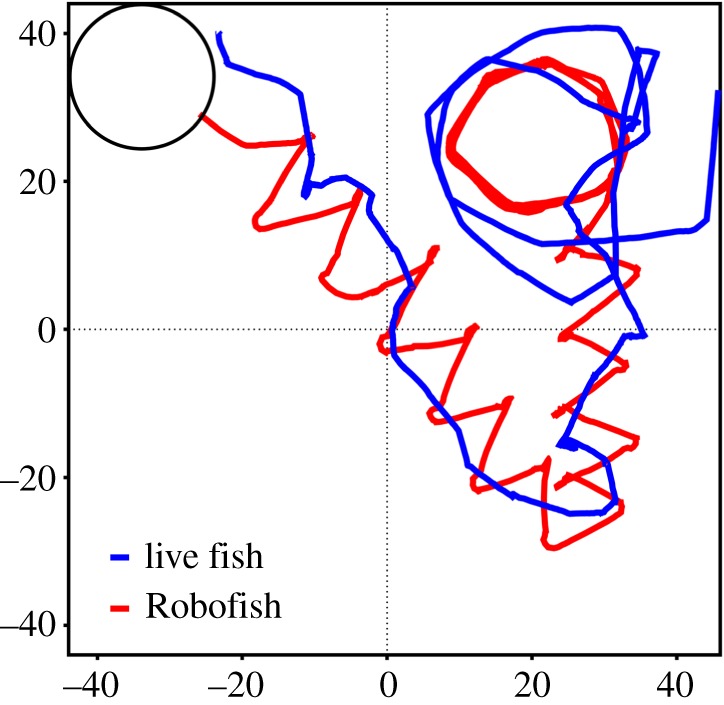
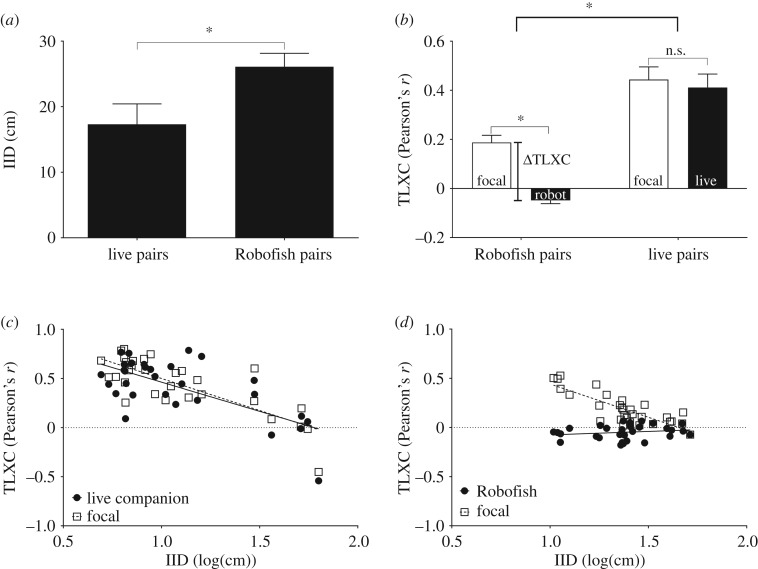
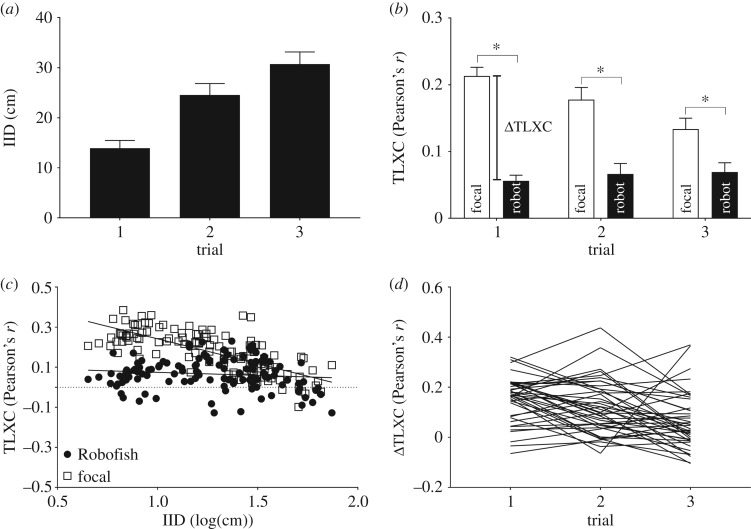
Responding towards the actions of others is one of the most important behavioural traits whenever animals of the same species interact. Mutual influences among interacting individuals may modulate the social responsiveness seen and thus make it often difficult to study the level and individual variation in responsiveness. Here, open-loop biomimetic robots that provide standardized, non-interactive social cues can be a useful tool. These robots are not affected by the live animal's actions but are assumed to still represent valuable and biologically relevant social cues. As this assumption is crucial for the use of biomimetic robots in behavioural studies, we hypothesized (i) that meaningful social interactions can be assumed if live animals maintain individual differences in responsiveness when interacting with both a biomimetic robot and a live partner. Furthermore, to study the level of individual variation in social responsiveness, we hypothesized (ii) that individual differences should be maintained over the course of multiple tests with the robot. We investigated the response of live guppies (Poecilia reticulata) when allowed to interact either with a biomimetic open-loop-controlled fish robot-'Robofish'-or with a live companion. Furthermore, we investigated the responses of live guppies when tested three times with Robofish. We found that responses of live guppies towards Robofish were weaker compared with those of a live companion, most likely as a result of the non-interactive open-loop behaviour of Robofish. Guppies, however, were consistent in their individual responses between a live companion and Robofish, and similar individual differences in response towards Robofish were maintained over repeated testing even though habituation to the test environment was detectable. Biomimetic robots like Robofish are therefore a useful tool for the study of social responsiveness in guppies and possibly other small fish species.
Keywords: Poecilia reticulata; biomimetic robots; fish-inspired robots; robotic fish; social responsiveness.
Conflict of interest statement
The authors declare no competing interests.
Figures
References
-
- Krause J, Ruxton GD. 2002. Living in groups. Oxford, UK: Oxford University Press.
Associated data
LinkOut - more resources
Full Text Sources
Other Literature Sources
Research Materials
