

Ultrastretchable Fiber Sensor with High Sensitivity in Whole Workable Range for Wearable Electronics and Implantable Medicine
- PMID: 30250797
- PMCID: PMC6145303
- DOI: 10.1002/advs.201800558
Ultrastretchable Fiber Sensor with High Sensitivity in Whole Workable Range for Wearable Electronics and Implantable Medicine
Abstract
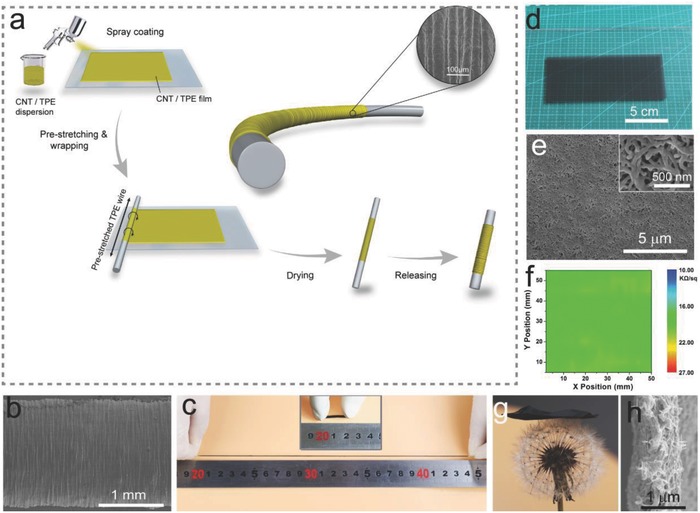
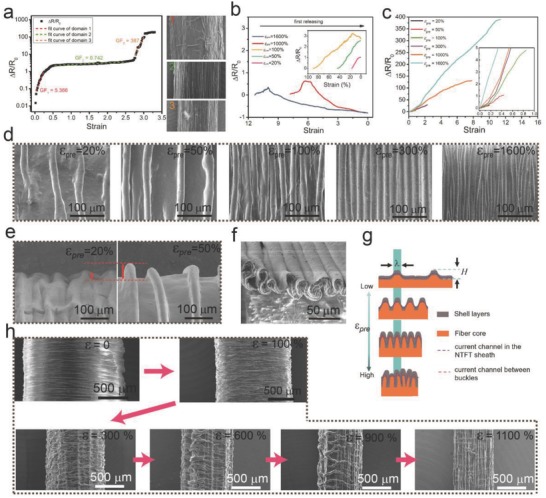
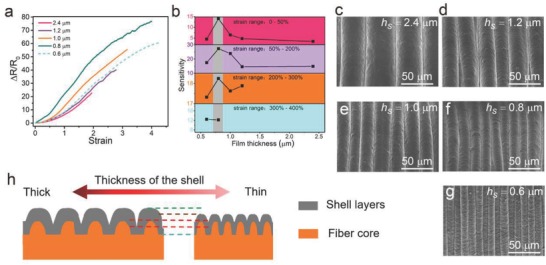
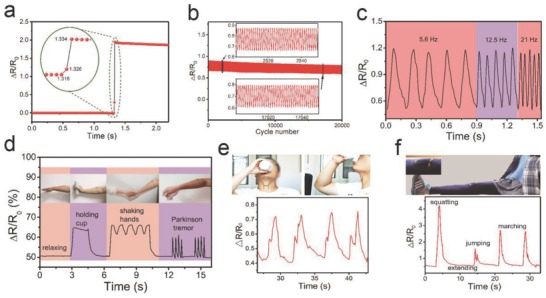
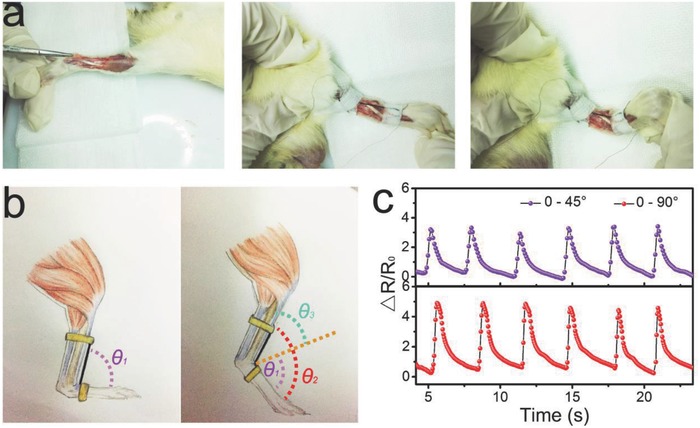
Fast progress in material science has led to the development of flexible and stretchable wearable sensing electronics. However, mechanical mismatches between the devices and soft human tissue usually impact the sensing performance. An effective way to solve this problem is to develop mechanically superelastic and compatible sensors that have high sensitivity in whole workable strain range. Here, a buckled sheath-core fiber-based ultrastretchable sensor with enormous stain gauge enhancement is reported. Owing to its unique sheath and buckled microstructure on a multilayered carbon nanotube/thermal plastic elastomer composite, the fiber strain sensor has a large workable strain range (>1135%), fast response time (≈16 ms), high sensitivity (GF of 21.3 at 0-150%, and 34.22 at 200-1135%), and repeatability and stability (20 000 cycles load/unload test). These features endow the sensor with a strong ability to monitor both subtle and large muscle motions of the human body. Moreover, attaching the sensor to a rat tendon as an implantable device allowes quantitative evaluation of tendon injury rehabilitation.
Keywords: fibers; implantable devices; strain sensors; ultrastretchable materials; wearable sensors.
Figures
Similar articles
-
Highly Stretchable Core-Sheath Fibers via Wet-Spinning for Wearable Strain Sensors.ACS Appl Mater Interfaces. 2018 Feb 21;10(7):6624-6635. doi: 10.1021/acsami.7b18677. Epub 2018 Feb 12. ACS Appl Mater Interfaces. 2018. PMID: 29384359
-
Ultrastretchable Multilayered Fiber with a Hollow-Monolith Structure for High-Performance Strain Sensor.ACS Appl Mater Interfaces. 2018 Oct 10;10(40):34592-34603. doi: 10.1021/acsami.8b11527. Epub 2018 Sep 25. ACS Appl Mater Interfaces. 2018. PMID: 30226365
-
Significant Stretchability Enhancement of a Crack-Based Strain Sensor Combined with High Sensitivity and Superior Durability for Motion Monitoring.ACS Appl Mater Interfaces. 2019 Feb 20;11(7):7405-7414. doi: 10.1021/acsami.8b20768. Epub 2019 Feb 8. ACS Appl Mater Interfaces. 2019. PMID: 30698944
-
Flexible Electronics toward Wearable Sensing.Acc Chem Res. 2019 Mar 19;52(3):523-533. doi: 10.1021/acs.accounts.8b00500. Epub 2019 Feb 15. Acc Chem Res. 2019. PMID: 30767497 Review.
-
Heterogeneous Strain Distribution of Elastomer Substrates To Enhance the Sensitivity of Stretchable Strain Sensors.Acc Chem Res. 2019 Jan 15;52(1):82-90. doi: 10.1021/acs.accounts.8b00499. Epub 2018 Dec 26. Acc Chem Res. 2019. PMID: 30586278 Review.
Cited by
-
Conductive fibers for biomedical applications.Bioact Mater. 2022 Oct 20;22:343-364. doi: 10.1016/j.bioactmat.2022.10.014. eCollection 2023 Apr. Bioact Mater. 2022. PMID: 36311045 Free PMC article. Review.
-
A Size-Cuttable, Skin-Interactive Wearable Sensor for Digital Deciphering of Epidermis Wavy Deformation.Biosensors (Basel). 2022 Jul 29;12(8):580. doi: 10.3390/bios12080580. Biosensors (Basel). 2022. PMID: 36004976 Free PMC article.
-
Nanogenerator-Based Self-Powered Sensors for Wearable and Implantable Electronics.Research (Wash D C). 2020 Mar 10;2020:8710686. doi: 10.34133/2020/8710686. eCollection 2020. Research (Wash D C). 2020. PMID: 32259107 Free PMC article. Review.
-
Ultra tough and high resilience mechanochromic fibres for real world stress detection.Nat Commun. 2025 Mar 6;16(1):2257. doi: 10.1038/s41467-025-57522-1. Nat Commun. 2025. PMID: 40050278 Free PMC article.
-
Surface-Embedding of Mo Microparticles for Robust and Conductive Biodegradable Fiber Electrodes: Toward 1D Flexible Transient Electronics.Adv Sci (Weinh). 2023 May;10(15):e2206186. doi: 10.1002/advs.202206186. Epub 2023 Mar 30. Adv Sci (Weinh). 2023. PMID: 36995044 Free PMC article.
References
-
- Wang X. W., Liu Z., Zhang T., Small 2017, 13, 1602790.
-
- Hammock M. L., Chortos A., Tee B. C., Tok J. B., Bao Z., Adv. Mater. 2013, 25, 5997. - PubMed
-
- Amjadi M., Kyung K. U., Park I., Sitti M., Adv. Funct. Mater. 2016, 26, 1678.
-
- Yao S., Zhu Y., Adv. Mater. 2015, 27, 1480. - PubMed
-
- Xu F., Zhu Y., Adv. Mater. 2012, 24, 5117. - PubMed
LinkOut - more resources
Full Text Sources
Other Literature Sources