

An Adaptive Zero Velocity Detection Algorithm Based on Multi-Sensor Fusion for a Pedestrian Navigation System
- PMID: 30274161
- PMCID: PMC6210023
- DOI: 10.3390/s18103261
An Adaptive Zero Velocity Detection Algorithm Based on Multi-Sensor Fusion for a Pedestrian Navigation System
Abstract
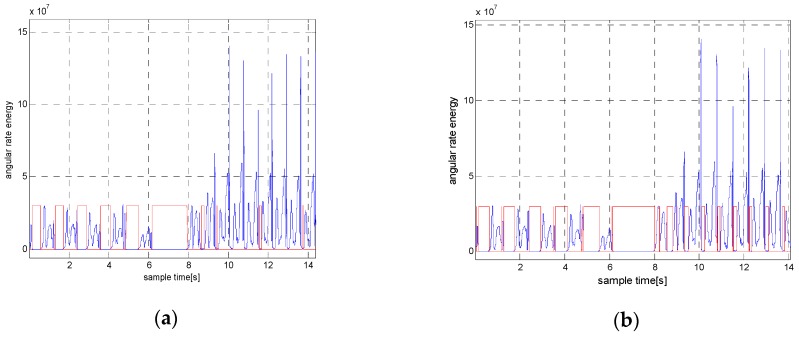
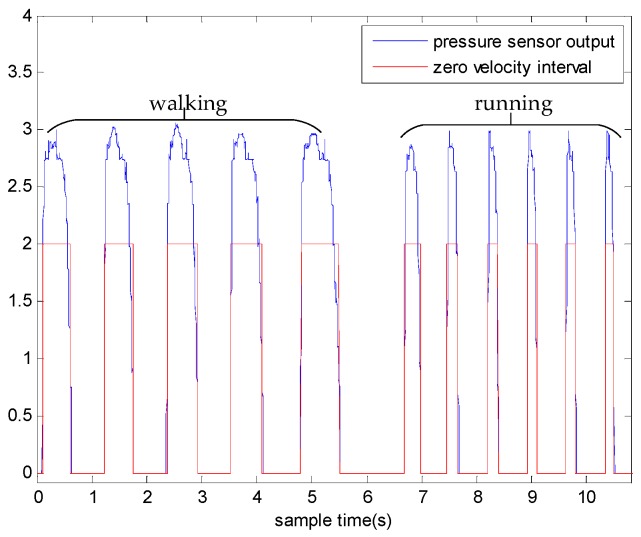
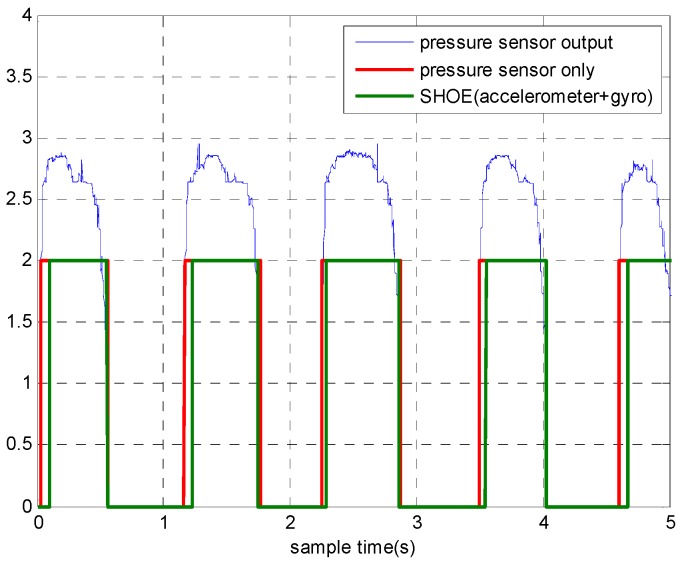
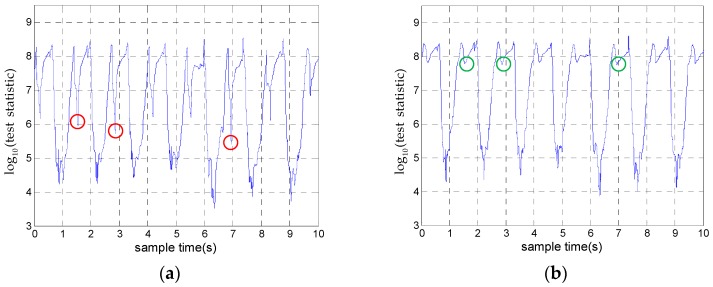
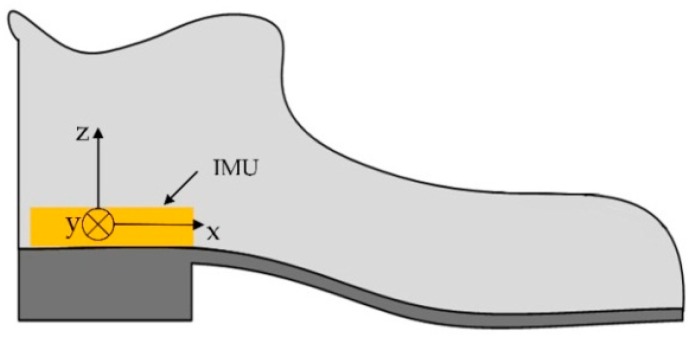
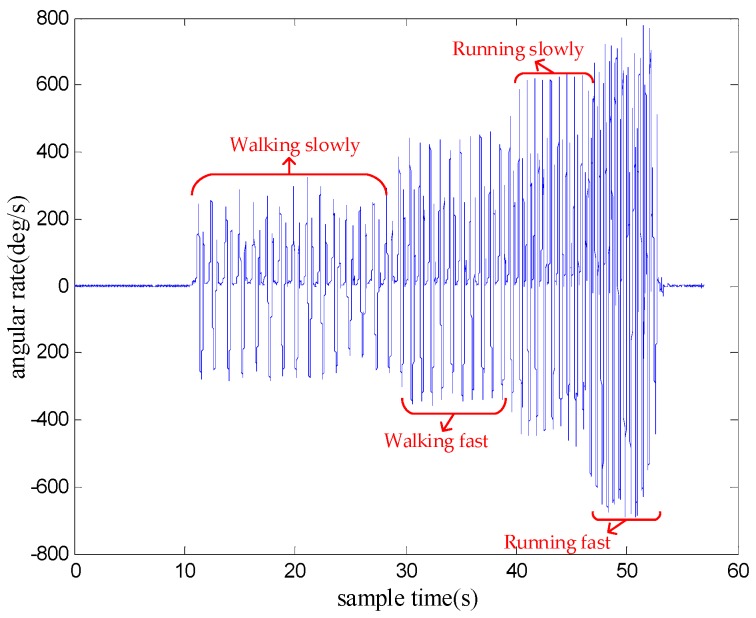
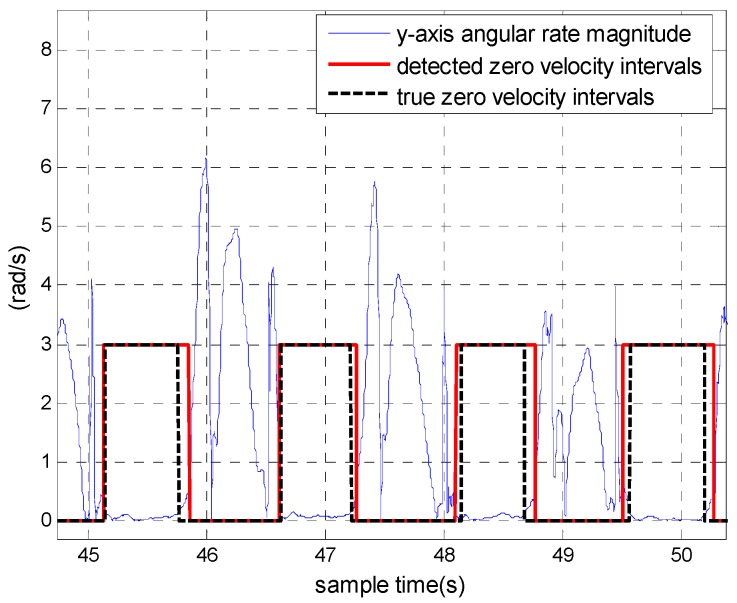
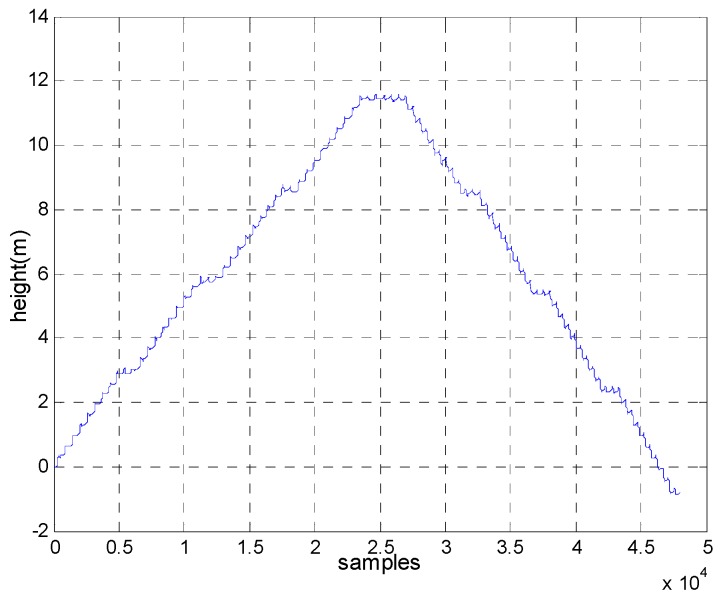
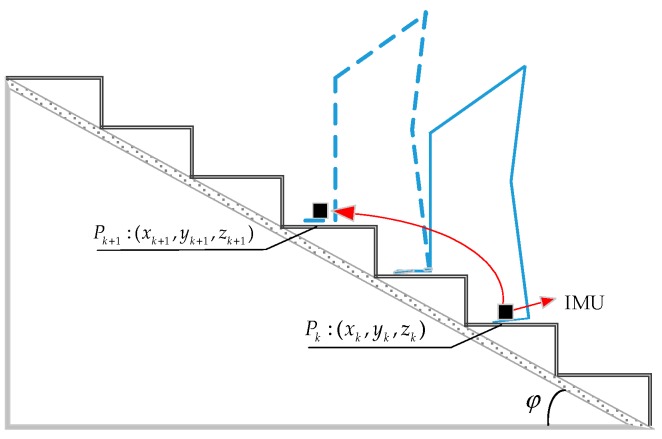
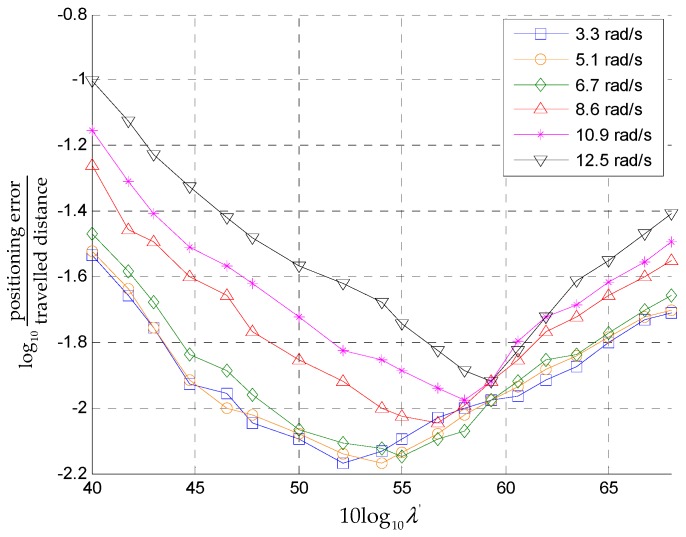
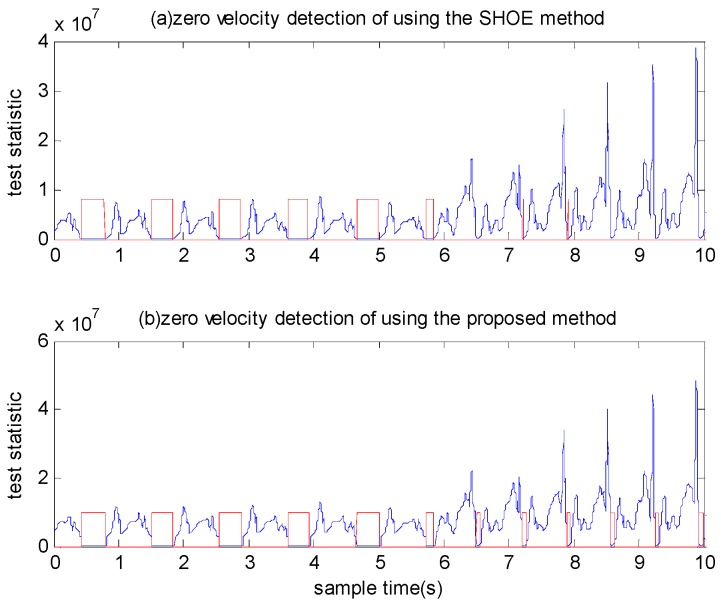
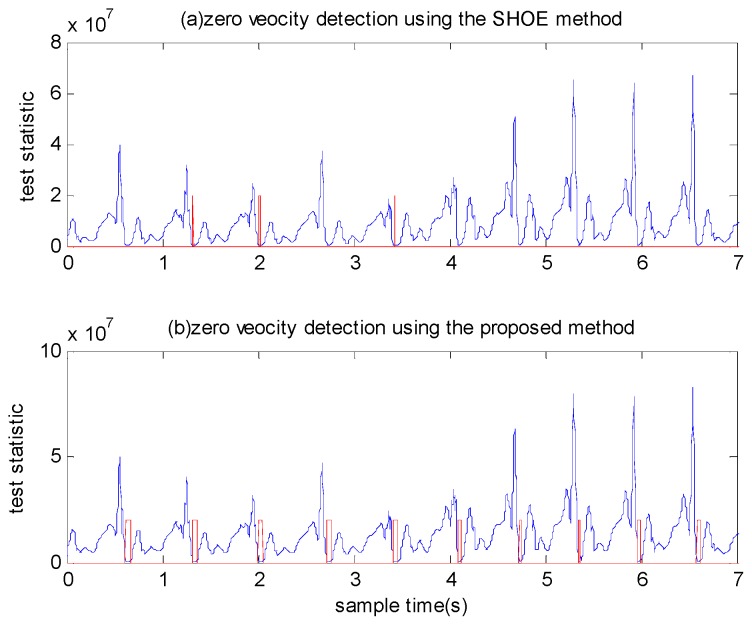
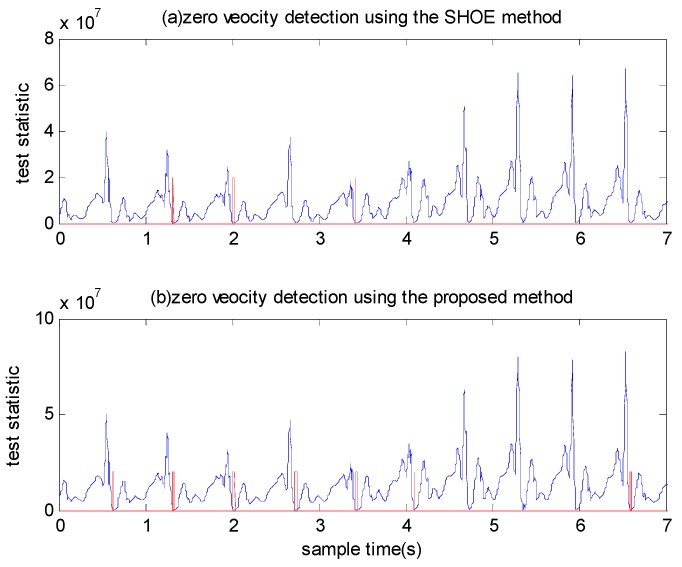
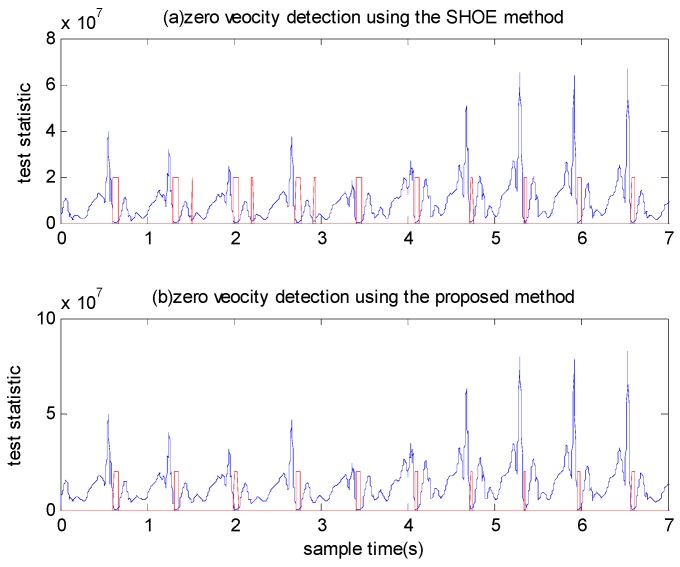
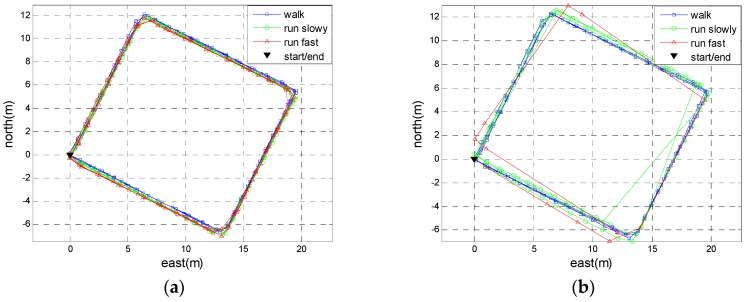
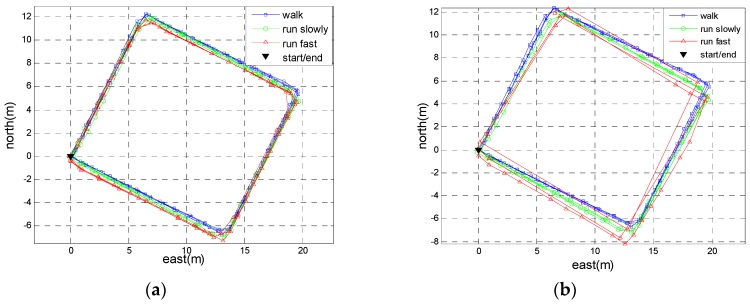
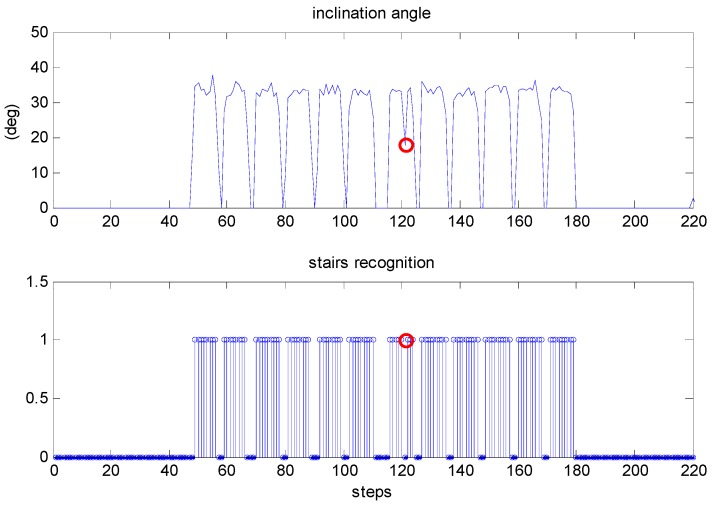
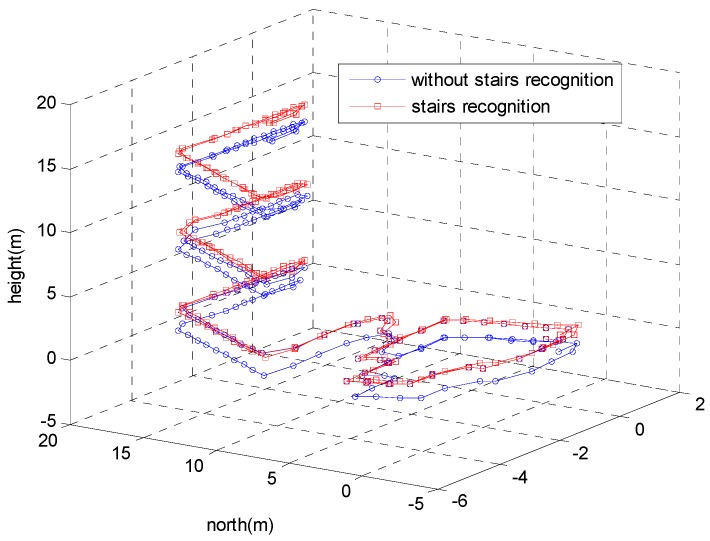
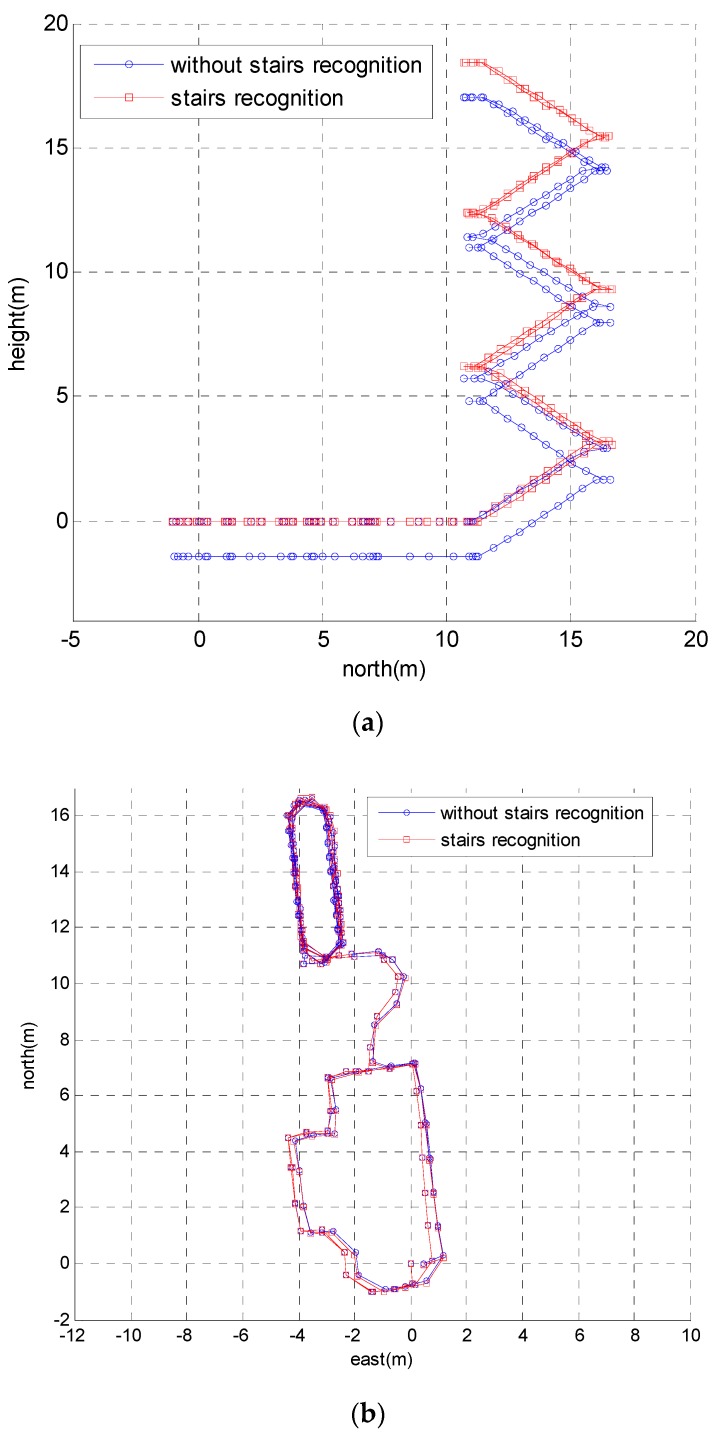
The zero velocity update (ZUPT) algorithm is an effective way to suppress the error growth for a foot-mounted pedestrian navigation system. To make ZUPT work properly, it is necessary to detect zero velocity intervals correctly. Existing zero velocity detection methods cannot provide good performance at high gait speeds or stair climbing. An adaptive zero velocity detection approach based on multi-sensor fusion is proposed in this paper. The measurements of an accelerometer, gyroscope and pressure sensor were employed to construct a zero-velocity detector. Then, the adaptive threshold was proposed to improve the accuracy of the detector under various motion modes. In addition, to eliminate the height drift, a stairs recognition method was developed to distinguish staircase movement from level walking. Detection performance was examined with experimental data collected at varying motion modes in real scenarios. The experimental results indicate that the proposed method can correctly detect zero velocity intervals under various motion modes.
Keywords: ZUPT; adaptive threshold; pedestrian navigation system; stairs recognition; zero velocity detection.
Conflict of interest statement
The authors declare no conflict of interest.
Figures
References
-
- Zhang R., Hoflinger F., Reindl L. Inertial sensor based indoor localization and monitoring system for emergency responders. IEEE Sens. J. 2013;13:838–848. doi: 10.1109/JSEN.2012.2227593. - DOI
-
- Bird J., Arden D. Indoor navigation with foot-mounted strapdown inertial navigation and magnetic sensors [Emerging Opportunities for Localization and Tracking] IEEE Wirel. Commun. 2011;18:28–35. doi: 10.1109/MWC.2011.5751293. - DOI
-
- Skog I., Nilsson J.O., Handel P. Pedestrian tracking using an IMU array; Proceedings of the IEEE International Conference on Electronics, Computing and Communication Technologies; Bangalore, India. 6–7 January 2014; pp. 1–4.
-
- Gu Y., Song Q., Li Y., Ma M. Foot-mounted pedestrian navigation based on particle filter with an adaptive weight updating strategy. J. Navigat. 2015;68:23–38. doi: 10.1017/S0373463314000496. - DOI
LinkOut - more resources
Full Text Sources
