

A Dexterous, Glove-Based Teleoperable Low-Power Soft Robotic Arm for Delicate Deep-Sea Biological Exploration
- PMID: 30283051
- PMCID: PMC6170437
- DOI: 10.1038/s41598-018-33138-y
A Dexterous, Glove-Based Teleoperable Low-Power Soft Robotic Arm for Delicate Deep-Sea Biological Exploration
Abstract
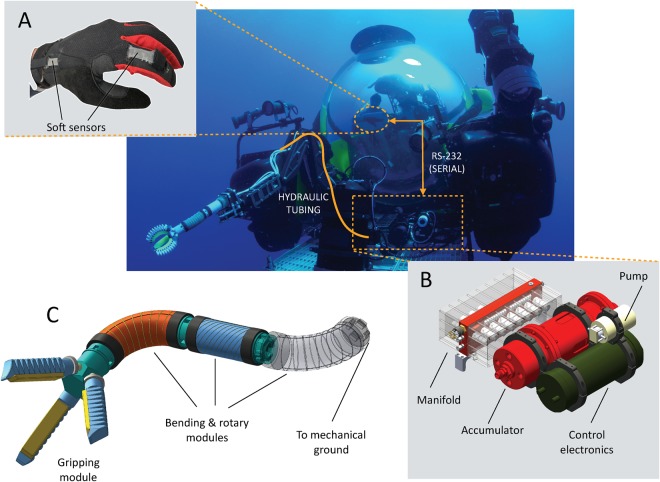
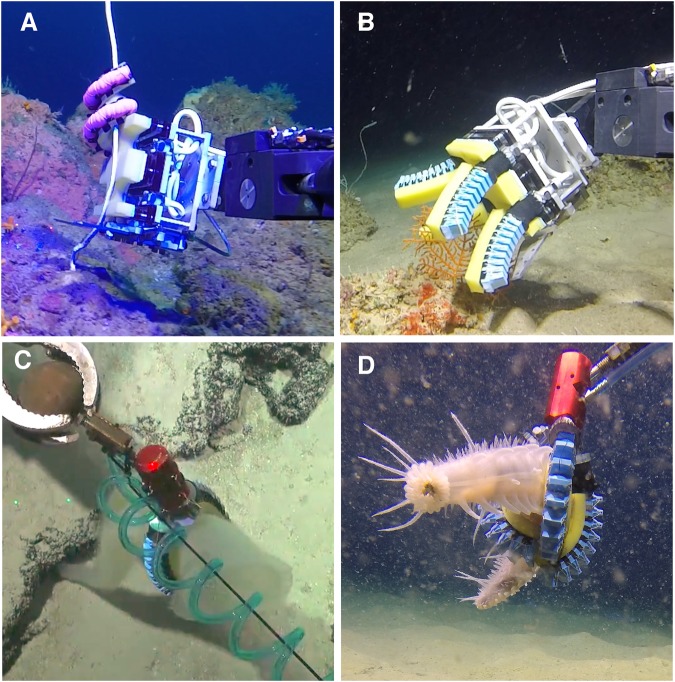
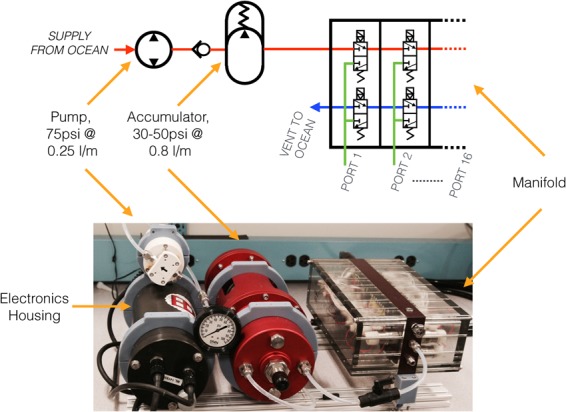
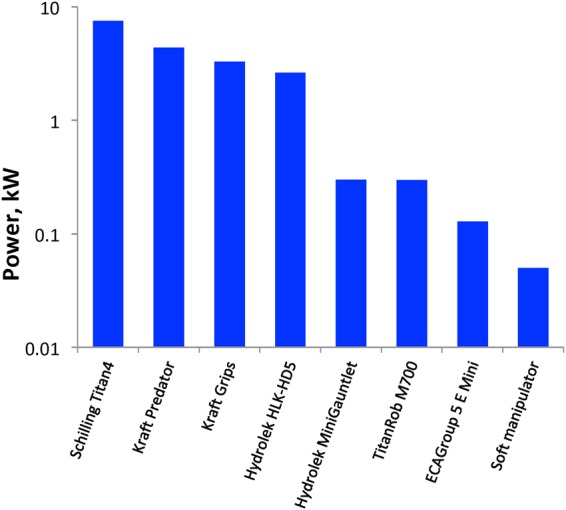
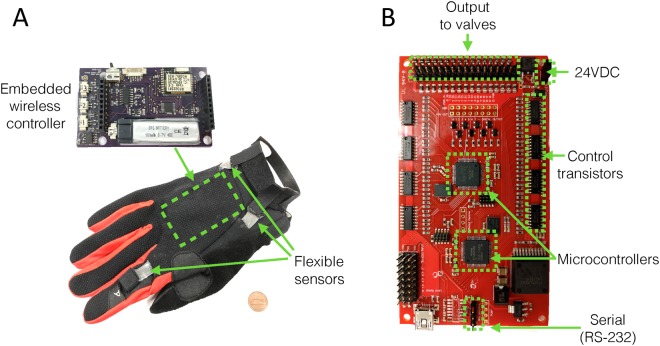
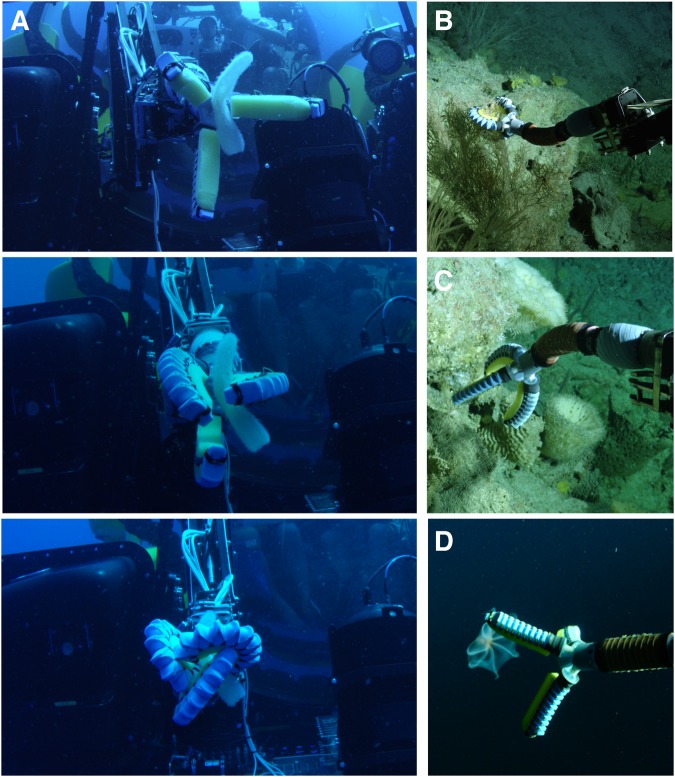
Modern marine biologists seeking to study or interact with deep-sea organisms are confronted with few options beyond industrial robotic arms, claws, and suction samplers. This limits biological interactions to a subset of "rugged" and mostly immotile fauna. As the deep sea is one of the most biologically diverse and least studied ecosystems on the planet, there is much room for innovation in facilitating delicate interactions with a multitude of organisms. The biodiversity and physiology of shallow marine systems, such as coral reefs, are common study targets due to the easier nature of access; SCUBA diving allows for in situ delicate human interactions. Beyond the range of technical SCUBA (~150 m), the ability to achieve the same level of human dexterity using robotic systems becomes critically important. The deep ocean is navigated primarily by manned submersibles or remotely operated vehicles, which currently offer few options for delicate manipulation. Here we present results in developing a soft robotic manipulator for deep-sea biological sampling. This low-power glove-controlled soft robot was designed with the future marine biologist in mind, where science can be conducted at a comparable or better means than via a human diver and at depths well beyond the limits of SCUBA. The technology relies on compliant materials that are matched with the soft and fragile nature of marine organisms, and uses seawater as the working fluid. Actuators are driven by a custom proportional-control hydraulic engine that requires less than 50 W of electrical power, making it suitable for battery-powered operation. A wearable glove master allows for intuitive control of the arm. The manipulator system has been successfully operated in depths exceeding 2300 m (3500 psi) and has been field-tested onboard a manned submersible and unmanned remotely operated vehicles. The design, development, testing, and field trials of the soft manipulator is placed in context with existing systems and we offer suggestions for future work based on these findings.
Conflict of interest statement
The authors declare no competing interests.
Figures
References
-
- Anderson, V. C. MPL Experimental RUM. Scripps Institution of Oceanography, Reference 60–26 (1960).
-
- Jones RA. Manipulator Systems: A Means for Doing Underwater Work. Naval Engineers Journal. 1968;80(1):107–118. doi: 10.1111/j.1559-3584.1968.tb05436.x. - DOI
-
- Gelhaus FE, Roman HT. Robot applications in nuclear power plants. Progress in Nuclear Energy. 1990;23(1):1–33. doi: 10.1016/0149-1970(90)90012-T. - DOI
-
- Whitcomb, L. L. Underwater robotics: Out of the research laboratory and into the field. In Proceedings of IEEE International Conference on Robotics and Automation 2000. V.1, pp. 709-716. IEEE. (2000).
-
- Kelley, C., Kerby, T., Sarradin, P., Sarrazin, J. & Lindsay, D. Submersibles and Remotely Operated Vehicles in Biological Sampling in the Deep Sea (eds Clark, M. R., Consalvey, M. & Rowden, A. A.) 285–305 (Wiley, 2016).
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
Research Materials