

A Non-Linear Model of an All-Elastomer, in-Plane, Capacitive, Tactile Sensor Under the Application of Normal Forces
- PMID: 30356016
- PMCID: PMC6263915
- DOI: 10.3390/s18113614
A Non-Linear Model of an All-Elastomer, in-Plane, Capacitive, Tactile Sensor Under the Application of Normal Forces
Abstract
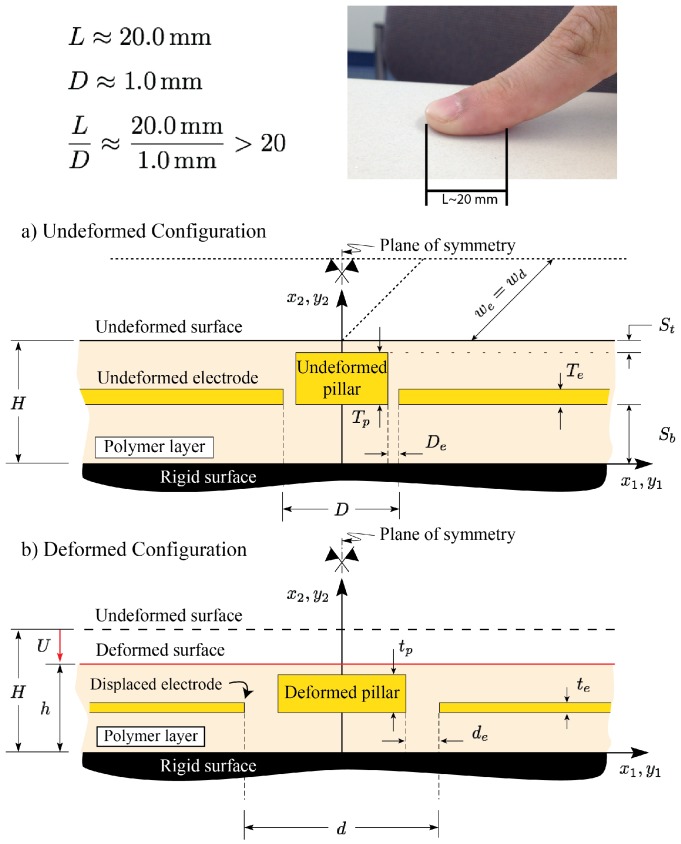
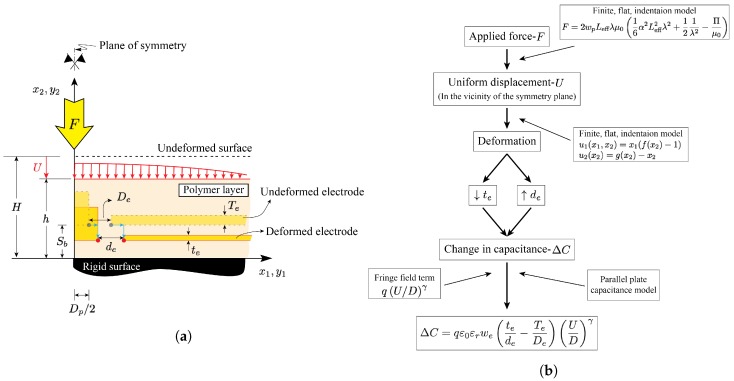
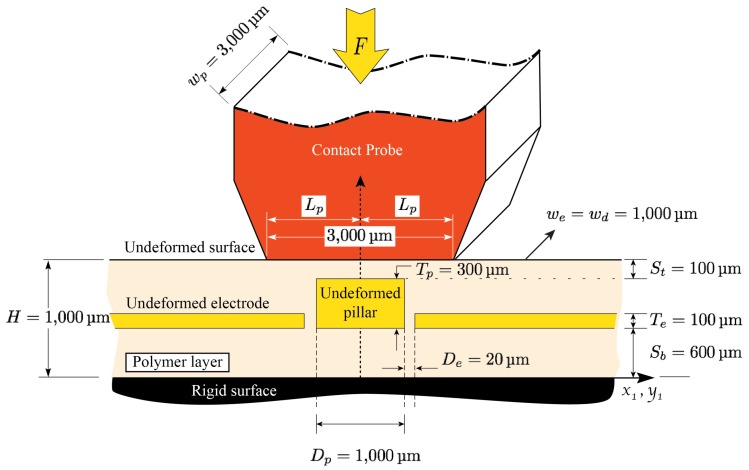
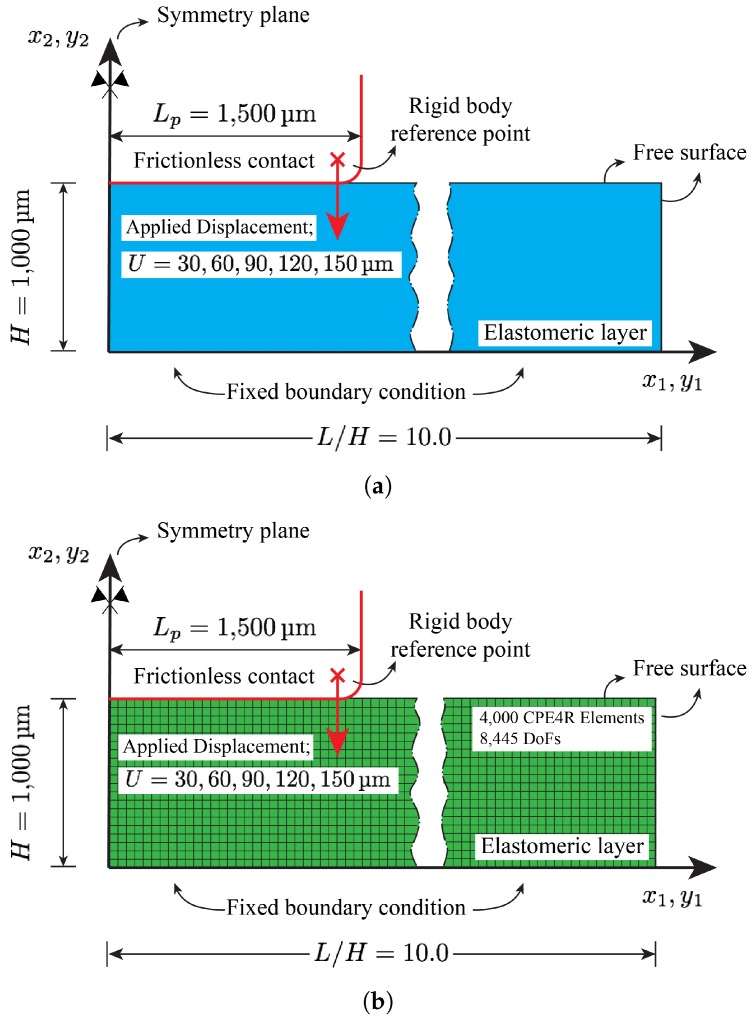
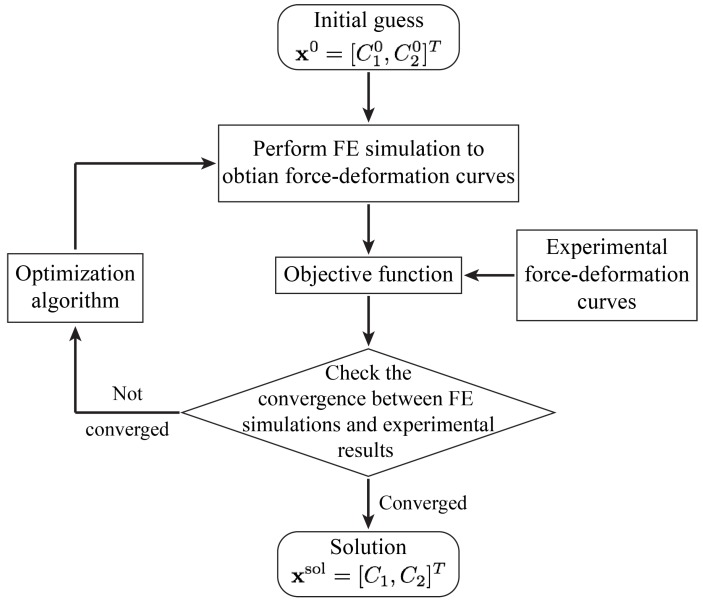
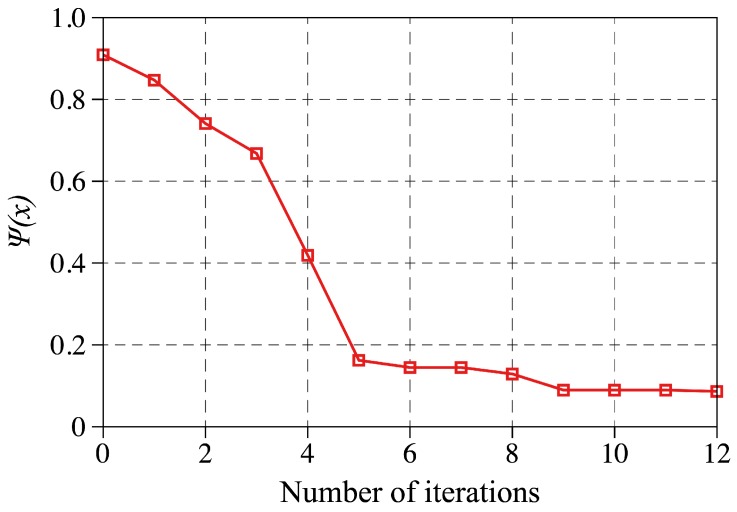
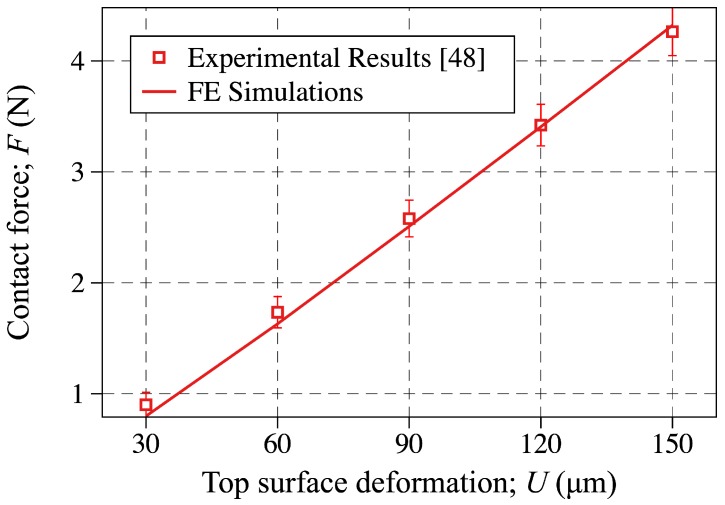
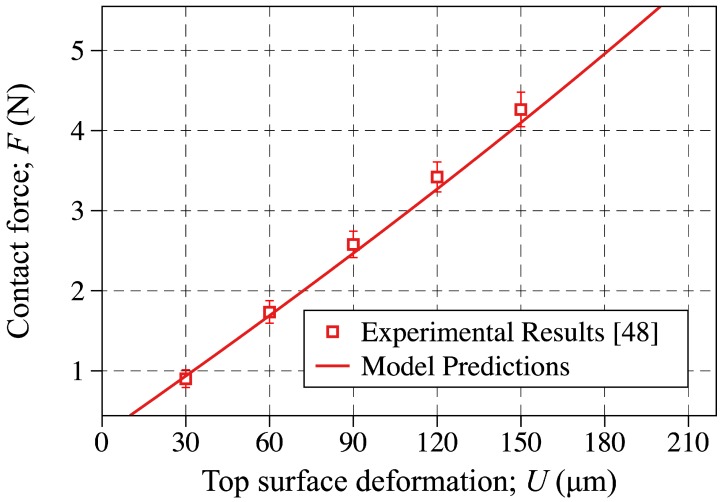
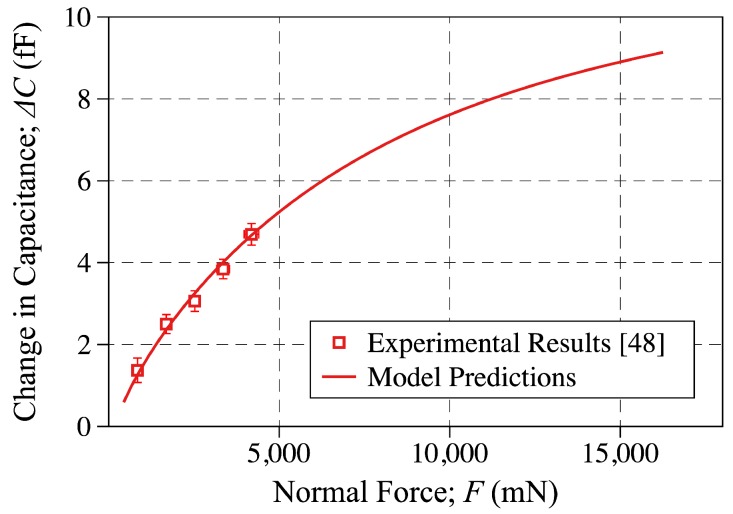
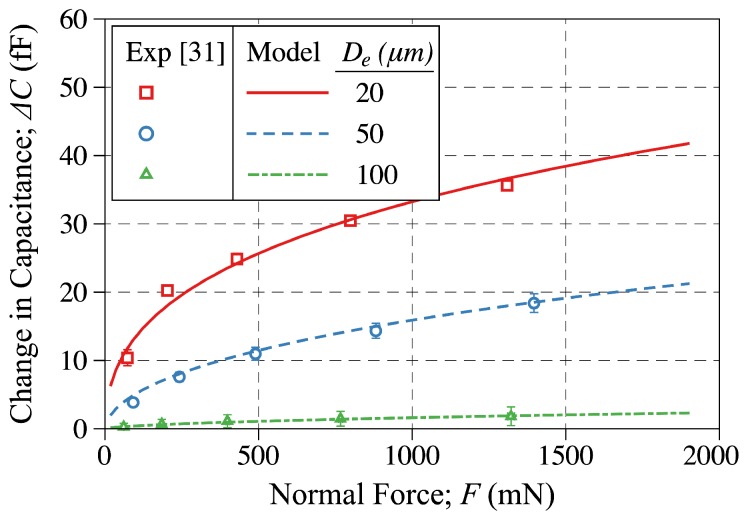
In this work, a large deformation, non-linear semi-analytical model for an all-elastomer, capacitive tactile unit-sensor is developed. The model is capable of predicting the response of such sensors over their entire sensing range under the application of normal forces. In doing so the finite flat punch indentation model developed earlier is integrated with a capacitance model to predict the change-in-capacitance as a function of applied normal forces. The empirical change-in-capacitance expression, based on the parallel plate capacitance model, is developed to account for the fringe field and saturation effects. The elastomeric layer used as a substrate in these sensors is modeled as an incompressible, non-linear, hyperelastic material. More specifically, the two term Mooney-Rivlin strain energy function is used as a constitutive response to relate the stresses and strains. The developed model assumes both geometrical as well as material non-linearity. Based on the related experimental work presented elsewhere, the inverse analysis, combining finite element (FE) modeling and non-linear optimization, is used to obtain the Mooney-Rivlin material parameters. Finally, to validate the model developed herein the model predictions are compared to the experimental results obtained elsewhere for four different tactile sensors. Great agreements are found to exist between the two which shows the model capabilities in capturing the response of these sensors. The model and methodologies developed in this work, may also help advancing bio-material studies in the determination of biological tissue properties.
Keywords: analytical modeling; capacitive all-elastomer tactile sensors; finite elements; finite flat punch indentation; inverse analysis.
Conflict of interest statement
The authors declare no conflict of interest.
Figures
References
-
- Yogeswaran N., Dang W., Navaraj W., Shakthivel D., Khan S., Polat E., Gupta S., Heidari H., Kaboli M., Lorenzelli L., et al. New materials and advances in making electronic skin for interactive robots. Adv. Robot. 2015;29:1359–1373. doi: 10.1080/01691864.2015.1095653. - DOI
-
- Watanabe K., Sohgawa M., Kanashima T., Okuyama M., Norna H. Identification of various kinds of papers using multi-axial tactile sensor with micro-cantilevers; Proceedings of the 2013 World Haptics Conference (WHC); Daejeon, Korea. 14–18 April 2013.
-
- Xu D., Loeb G.E., Fishel J.A. Tactile identification of objects using Bayesian exploration; Proceedings of the 2013 IEEE International Conference on Robotics and Automation; Karlsruhe, Germany. 6–10 May 2013.
LinkOut - more resources
Full Text Sources
