

Bio-Cooperative Approach for the Human-in-the-Loop Control of an End-Effector Rehabilitation Robot
- PMID: 30364325
- PMCID: PMC6193510
- DOI: 10.3389/fnbot.2018.00067
Bio-Cooperative Approach for the Human-in-the-Loop Control of an End-Effector Rehabilitation Robot
Abstract
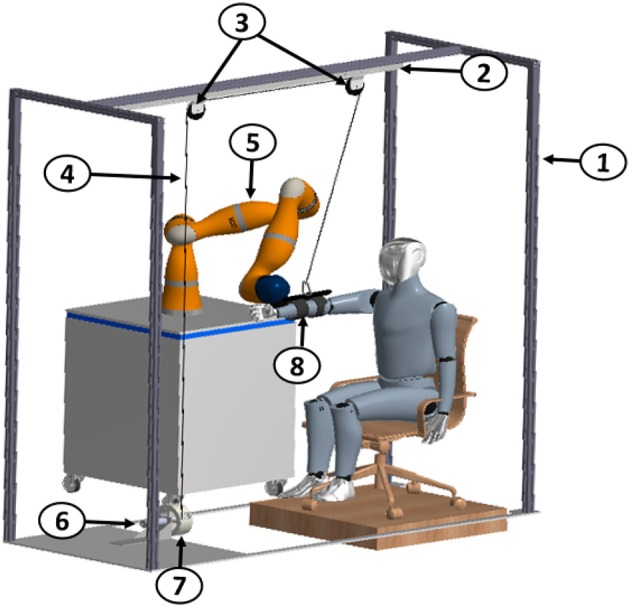
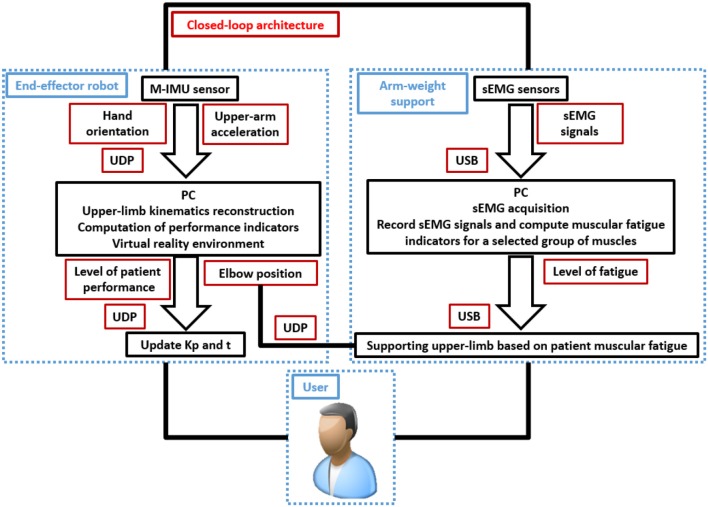
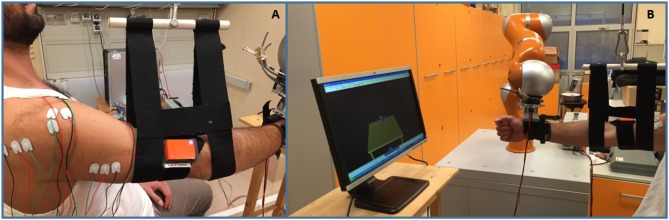
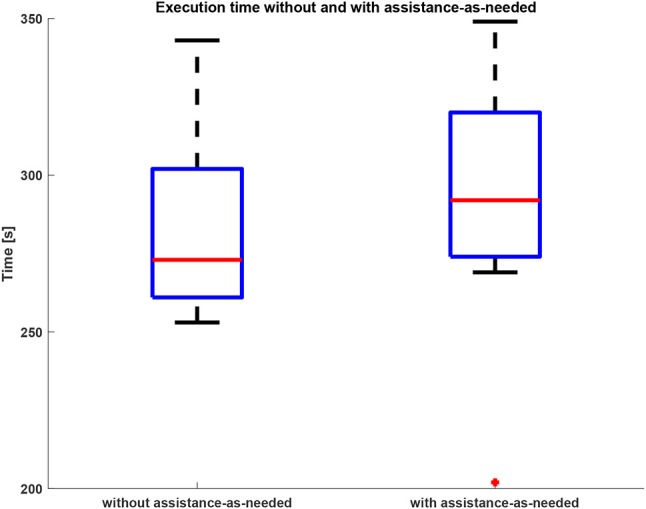
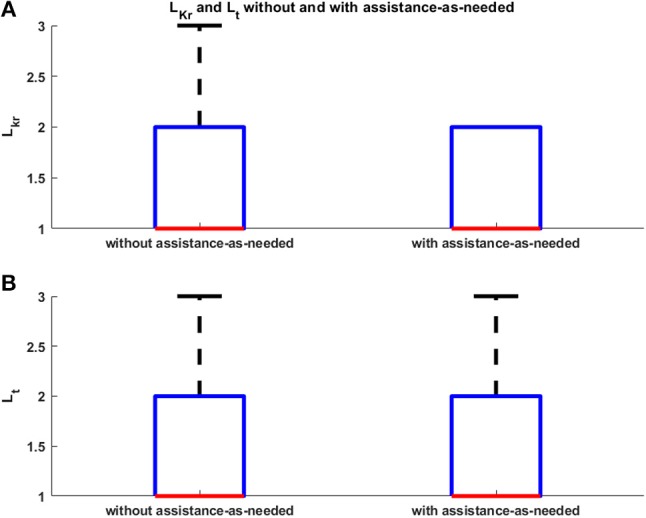
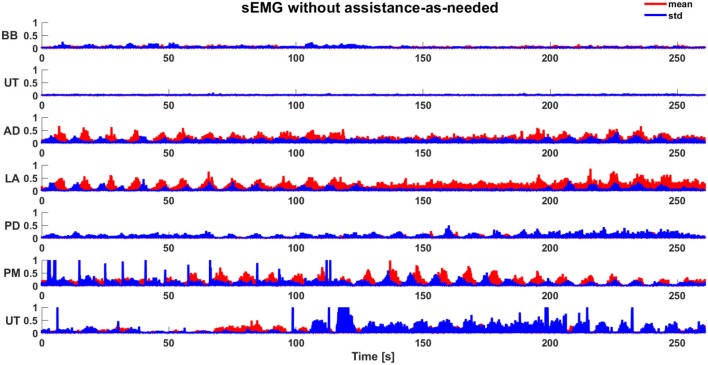
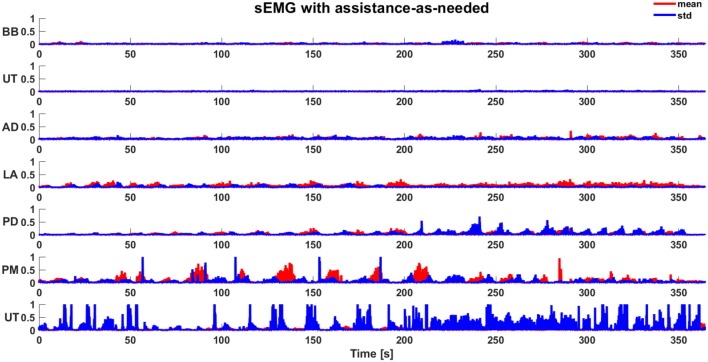
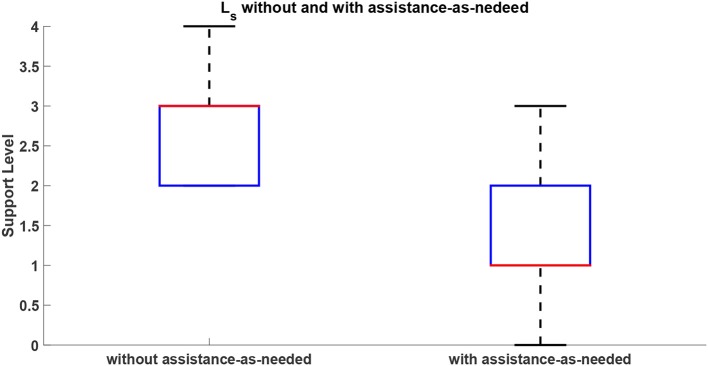
The design of patient-tailored rehabilitative protocols represents one of the crucial factors that influence motor recovery mechanisms, such as neuroplasticity. This approach, including the patient in the control loop and characterized by a control strategy adaptable to the user's requirements, is expected to significantly improve functional recovery in robot-aided rehabilitation. In this paper, a novel 3D bio-cooperative robotic platform is developed. A new arm-weight support system is included into an operational robotic platform for 3D upper limb robot-aided rehabilitation. The robotic platform is capable of adapting therapy characteristics to specific patient needs, thanks to biomechanical and physiological measurements, and thus closing the subject in the control loop. The level of arm-weight support and the level of the assistance provided by the end-effector robot are varied on the basis of muscular fatigue and biomechanical indicators. An assistance-as-needed approach is applied to provide the appropriate amount of assistance. The proposed platform has been experimentally validated on 10 healthy subjects; they performed 3D point-to-point tasks in two different conditions, i.e., with and without assistance-as-needed. The results have demonstrated the capability of the proposed system to properly adapt to real needs of the patients. Moreover, the provided assistance was shown to reduce the muscular fatigue without negatively influencing motion execution.
Keywords: arm-gravity support; biocooperative control; human-in-the-loop; muscle activation; upper limb robot-aided rehabilitation.
Figures
References
-
- Bischoff R., Kurth J., Schreiber G., Koeppe R., Albu-Schäffer A., Beyer A., et al. (2010). The kuka-dlr lightweight robot arm-a new reference platform for robotics research and manufacturing, in Robotics (ISR), 2010 41st International Symposium on and 2010 6th German Conference on Robotics (ROBOTIK) (Münich: ), 1–8.
-
- Formica D., Zollo L., Guglielmelli E. (2005). Torque-dependent compliance control in the joint space of an operational robotic machine for motor therapy, in ICORR 2005. 9th International Conference on Rehabilitation Robotics, 2005 (Chicago, IL: ), 341–344.
LinkOut - more resources
Full Text Sources