

A comparison of stability metrics based on inverted pendulum models for assessment of ramp walking
- PMID: 30395597
- PMCID: PMC6218075
- DOI: 10.1371/journal.pone.0206875
A comparison of stability metrics based on inverted pendulum models for assessment of ramp walking
Abstract
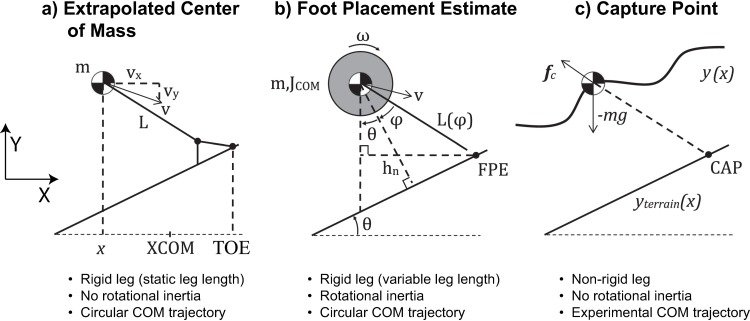
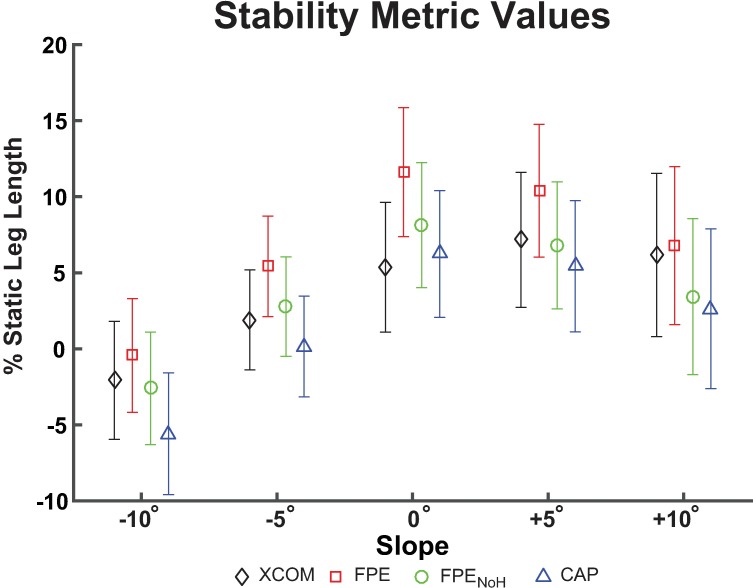
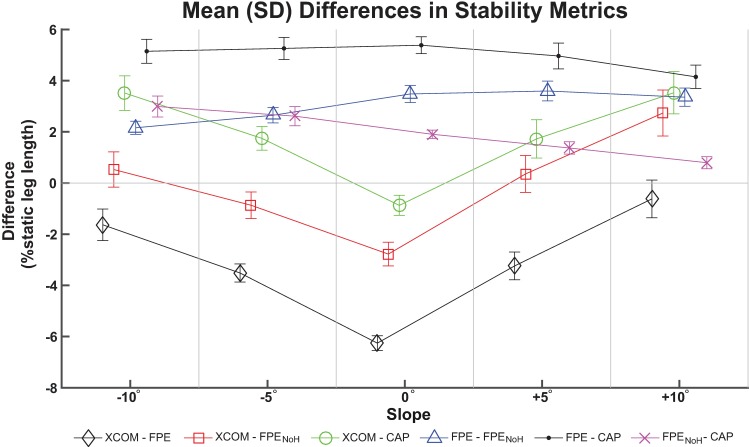
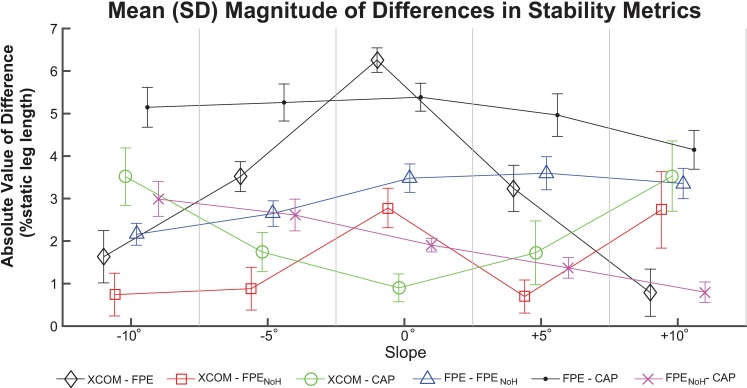
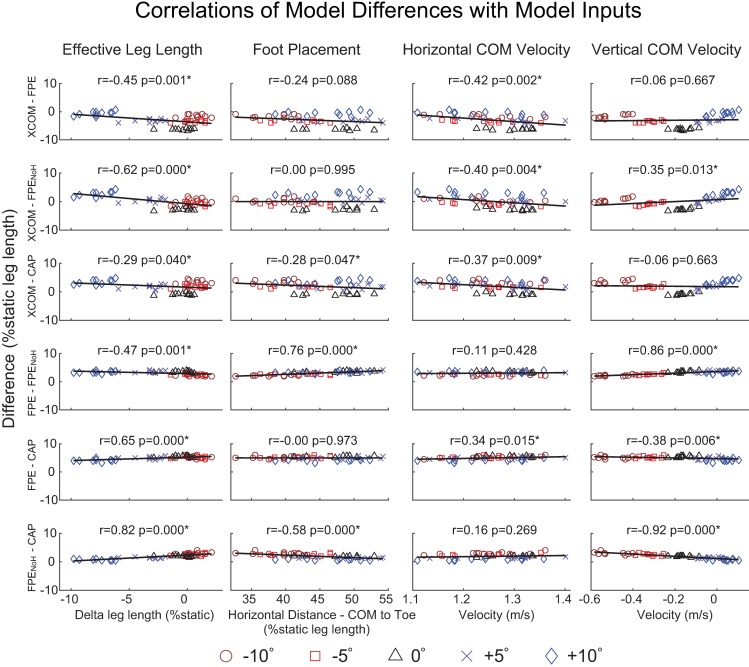
Maintaining balance on ramps is important for mobility. However, balance is commonly assessed using inverted pendulum-based metrics (e.g., margin of stability), which may not be appropriate for assessment of human walking on non-level surfaces. To investigate this, we analyzed stability on ramps using four different inverted pendulum models: extrapolated center of mass (XCOM), foot placement estimate (FPE), foot placement estimate neglecting angular momentum (FPENoH), and capture point (CAP). We analyzed experimental data from 10 able-bodied individuals walking on a ramp at 0°, ±5°, and ±10°. Contrary to our hypothesis that the magnitude of differences between metrics would be greatest at ±10°, we observed the greatest magnitude of differences between metrics at 0°. In general, the stability metrics were bounded by FPE and CAP at each slope, consistent with prior studies of level walking. Our results also suggest that clinical providers and researchers should be aware that assessments that neglect angular momentum (e.g., margin of stability, XCOM) may underestimate stability in the sagittal-plane in comparison to analyses which incorporate angular momentum (e.g., FPE). Except for FPENoH-CAP (r = 0.82), differences between metrics were only moderately correlated (|r|≤0.65) with violations of leg length assumptions in the underlying inverted pendulum models. The differences in FPENoH relative to FPE and CAP were strongly correlated with body center of mass vertical velocity (max |r| = 0.92), suggesting that model representations of center of mass motion influence stability metrics. However, there was not a clear overall relationship between model inputs and differences in stability metrics. Future sensitivity analyses may provide additional insight into model characteristics that influence stability metrics.
Conflict of interest statement
The authors have declared that no competing interests exist.
Figures
Similar articles
-
Ankle torque control that shifts the center of pressure from heel to toe contributes non-zero sagittal plane angular momentum during human walking.J Biomech. 2014 Apr 11;47(6):1389-94. doi: 10.1016/j.jbiomech.2014.01.034. Epub 2014 Jan 29. J Biomech. 2014. PMID: 24524989
-
Mediolateral angular momentum changes in persons with amputation during perturbed walking.Gait Posture. 2015 Mar;41(3):795-800. doi: 10.1016/j.gaitpost.2015.02.008. Epub 2015 Feb 27. Gait Posture. 2015. PMID: 25797789 Free PMC article.
-
Coordination of push-off and collision determine the mechanical work of step-to-step transitions when isolated from human walking.Gait Posture. 2012 Feb;35(2):292-7. doi: 10.1016/j.gaitpost.2011.09.102. Epub 2011 Oct 24. Gait Posture. 2012. PMID: 22030156
-
Control of human gait stability through foot placement.J R Soc Interface. 2018 Jun;15(143):20170816. doi: 10.1098/rsif.2017.0816. J R Soc Interface. 2018. PMID: 29875279 Free PMC article. Review.
-
Dynamic principles of gait and their clinical implications.Phys Ther. 2010 Feb;90(2):157-74. doi: 10.2522/ptj.20090125. Epub 2009 Dec 18. Phys Ther. 2010. PMID: 20023002 Free PMC article. Review.
Cited by
-
Dynamic stability and stepping strategies of young healthy adults walking on an oscillating treadmill.PLoS One. 2019 Feb 13;14(2):e0212207. doi: 10.1371/journal.pone.0212207. eCollection 2019. PLoS One. 2019. PMID: 30759162 Free PMC article. Clinical Trial.
-
The effects of age and physical activity status on muscle synergies when walking down slopes.Eur J Appl Physiol. 2025 Apr;125(4):1139-1156. doi: 10.1007/s00421-024-05679-w. Epub 2024 Nov 28. Eur J Appl Physiol. 2025. PMID: 39609289
-
State-Space Characterization of Balance Capabilities in Biped Systems with Segmented Feet.Front Robot AI. 2021 Feb 26;8:613038. doi: 10.3389/frobt.2021.613038. eCollection 2021. Front Robot AI. 2021. PMID: 33718440 Free PMC article.
References
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Miscellaneous
