

Influence of Asymmetry and Driving Forces on the Propulsion of Bubble-Propelled Catalytic Micromotors
- PMID: 30404402
- PMCID: PMC6190221
- DOI: 10.3390/mi7120229
Influence of Asymmetry and Driving Forces on the Propulsion of Bubble-Propelled Catalytic Micromotors
Erratum in
-
Erratum: Hayakawa, M., et al. Influence of Asymmetry and Driving Forces on the Propulsion of Bubble-Propelled Catalytic Micromotors. Micromachines 2016, 7, 229.Micromachines (Basel). 2017 Feb 20;8(2):61. doi: 10.3390/mi8020061. eCollection 2017 Feb. Micromachines (Basel). 2017. PMID: 31305792 Free PMC article.
Abstract
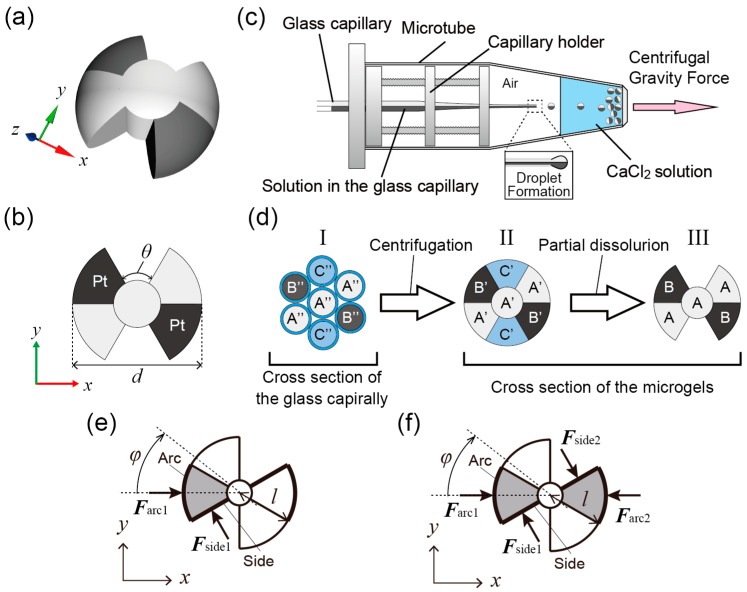
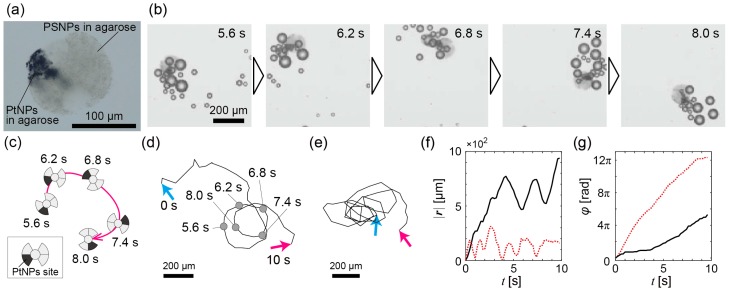
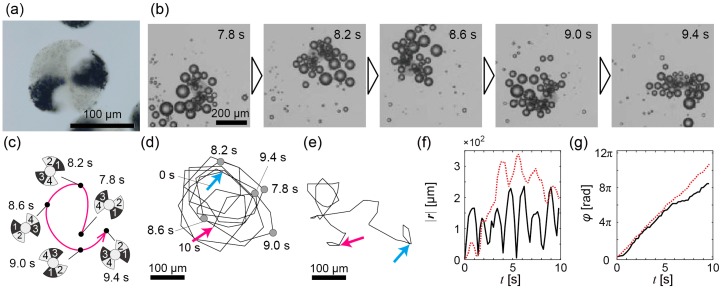
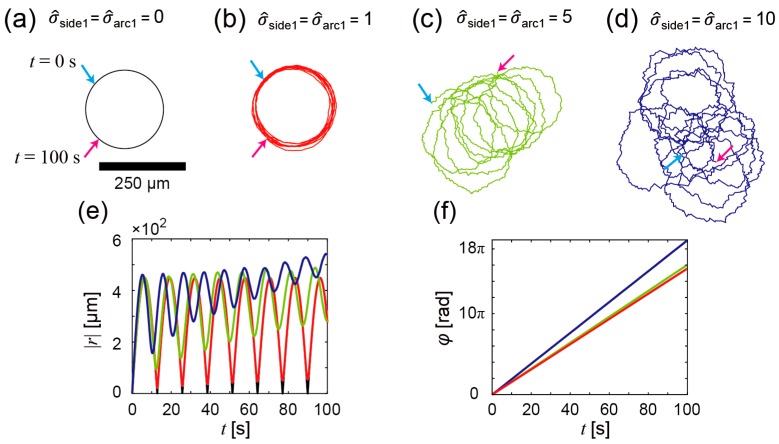
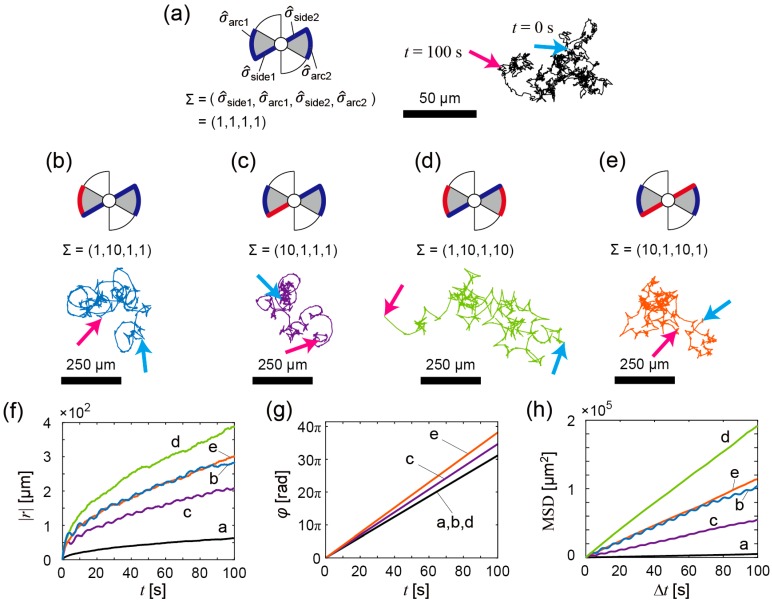
Bubble-propelled catalytic micromotors have recently been attracting much attention. A bubble-propulsion mechanism has the advantage of producing a stronger force and higher speed than other mechanisms for catalytic micromotors, but the nature of the fluctuated bubble generation process affects the motions of the micromotors, making it difficult to control their motions. Thus, understanding of the influence of fluctuating bubble propulsion on the motions of catalytic micromotors is important in exploiting the advantages of bubble-propelled micromotors. Here, we report experimental demonstrations of the bubble-propelled motions of propeller-shaped micromotors and numerical analyses of the influence of fluctuating bubble propulsion on the motions of propeller-shaped micromotors. We found that motions such as trochoid-like motion and circular motion emerged depending on the magnitude or symmetricity of fluctuations in the bubble-propulsion process. We hope that those results will help in the construction and application of sophisticated bubble-propelled micromotors in the future.
Keywords: active matter; bubble propulsion; complex-shaped multi-compartmental microgels; complex-shaped multi-compartmental microparticles; self-propelled micromotors.
Conflict of interest statement
The authors declare no conflict of interest.
Figures
References
LinkOut - more resources
Full Text Sources
