

Real-Time Sclera Force Feedback for Enabling Safe Robot-Assisted Vitreoretinal Surgery
- PMID: 30441165
- PMCID: PMC6241282
- DOI: 10.1109/EMBC.2018.8513255
Real-Time Sclera Force Feedback for Enabling Safe Robot-Assisted Vitreoretinal Surgery
Abstract
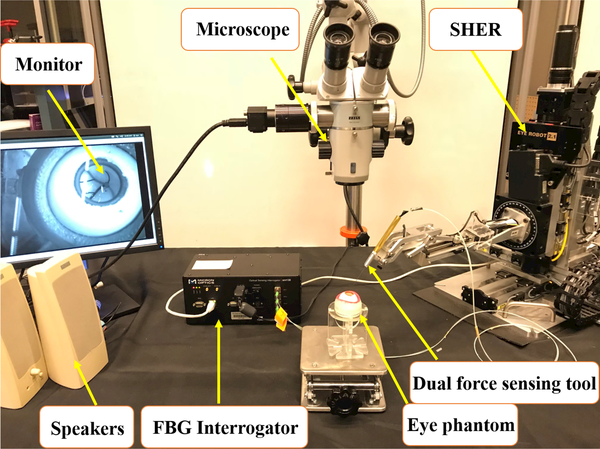
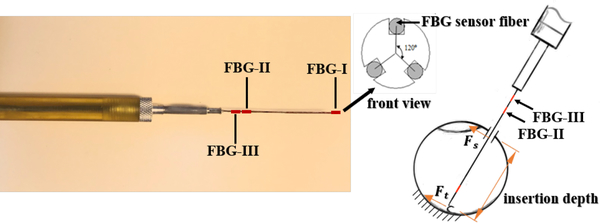
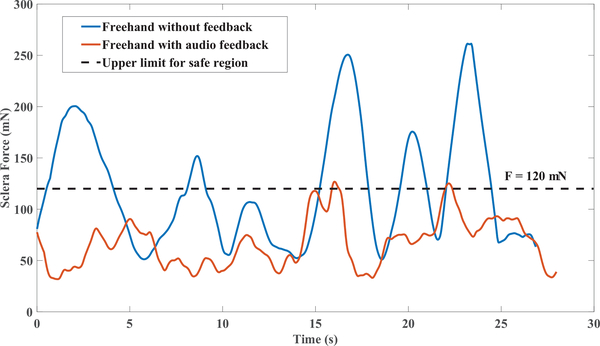
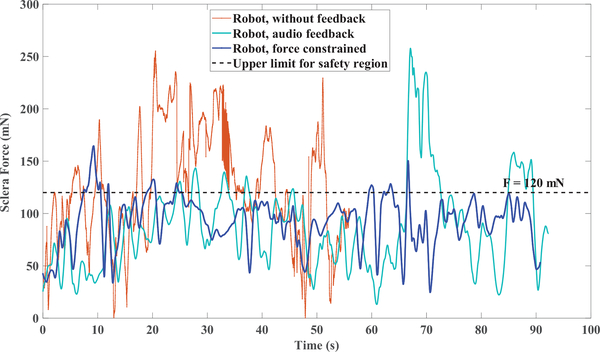
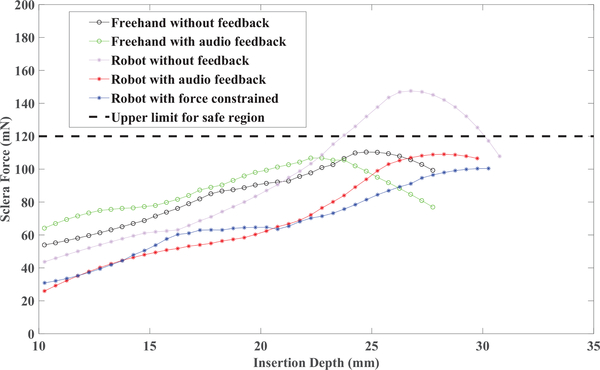
One of the major yet little recognized challenges in robotic vitreoretinal surgery is the matter of tool forces applied to the sclera. Tissue safety, coordinated tool use and interactions between tool tip and shaft forces are little studied. The introduction of robotic assist has further diminished the surgeon's ability to perceive scleral forces. Microsurgical tools capable of measuring such small forces integrated with robotmanipulators may therefore improve functionality and safety by providing sclera force feedback to the surgeon. In this paper, using a force-sensing tool, we have conducted robotassisted eye manipulation experiments to evaluate the utility of providing scleral force feedback. The work assesses 1) passive audio feedback and 2) active haptic feedback and evaluates the impact of these feedbacks on scleral forces in excess of aboundary. The results show that in presence of passive or active feedback, the duration of experiment increases, while the duration for which scleral forces exceed a safe threshold decreases.
Figures
References
-
- Wei W, Popplewell C, Chang S, Fine HF, and Simaan N, “Enabling technology for microvascular stenting in ophthalmic surgery,” Journal of Medical Devices, vol. 4, no. 1, p. 014503, 2010.
-
- Tanaka S, Harada K, Ida Y, Tomita K, Kato I, Arai F, Ueta T, Noda Y, Sugita N, and Mitsuishi M, “Quantitative assessment of manual and robotic microcannulation for eye surgery using new eye model,” The International Journal of Medical Robotics and Computer Assisted Surgery, vol. 11, no. 2, pp. 210–217, 2015. - PubMed
-
- Wilson JT, Gerber MJ, Prince SW, Chen C-W, Schwartz SD, Hubschman J-P, and Tsao T-C, “Intraocular robotic interventional surgical system (iriss): Mechanical design, evaluation, and master– slave manipulation,” The International Journal of Medical Robotics and Computer Assisted Surgery, 2017. - PubMed
-
- U. of Oxford. (2017) World first for robot eye operation. [Online]. Available: http://www.ox.ac.uk/news/ 2016-09-12-world-first-robot-eye-operation
-
- Taylor R, Jensen P, Whitcomb L, Barnes A, Kumar R, Stoianovici D, Gupta P, Wang Z, Dejuan E, and Kavoussi L, “A steady-hand robotic system for microsurgical augmentation,” The International Journal of Robotics Research, vol. 18, no. 12, pp. 1201–1210, 1999.
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources