

Overground walking with a robotic exoskeleton elicits trunk muscle activity in people with high-thoracic motor-complete spinal cord injury
- PMID: 30458839
- PMCID: PMC6245830
- DOI: 10.1186/s12984-018-0453-0
Overground walking with a robotic exoskeleton elicits trunk muscle activity in people with high-thoracic motor-complete spinal cord injury
Abstract
Background: The trunk muscles are critical for postural control. Recent neurophysiological studies have revealed sparing of trunk muscle function in individuals with spinal cord injury (SCI) classified with thoracic or cervical motor-complete injuries. These findings raise the possibility for recruiting and retraining this spared trunk function through rehabilitation. Robotic gait training devices may provide a means to promote trunk muscle activation. Thus, the objective of this study was to characterize and compare the activation of the trunk muscles during walking with two robotic gait training devices (Ekso and Lokomat) in people with high thoracic motor-complete SCI.
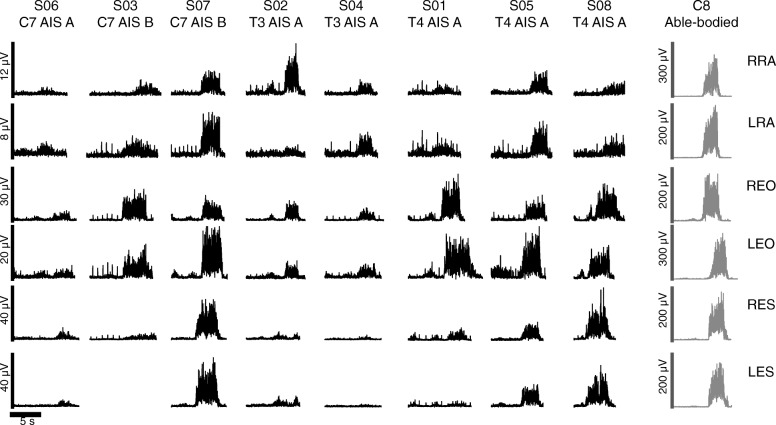
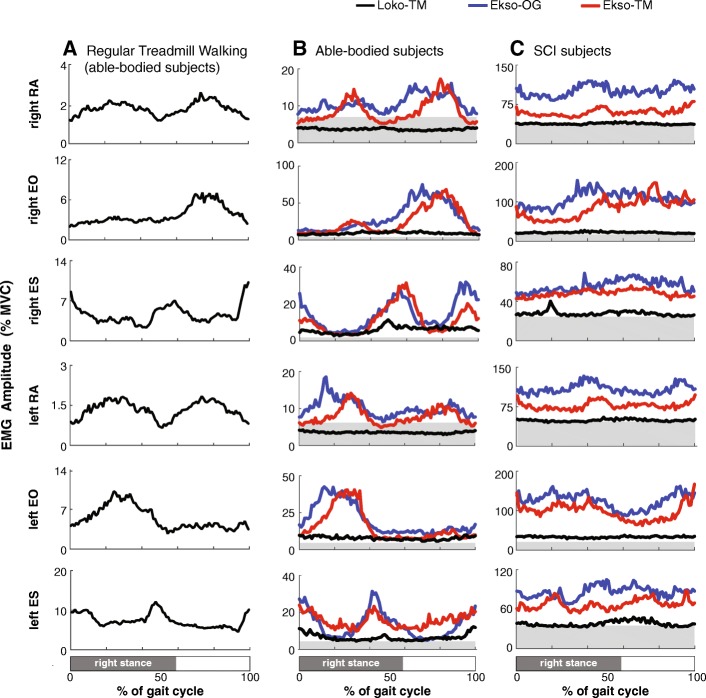
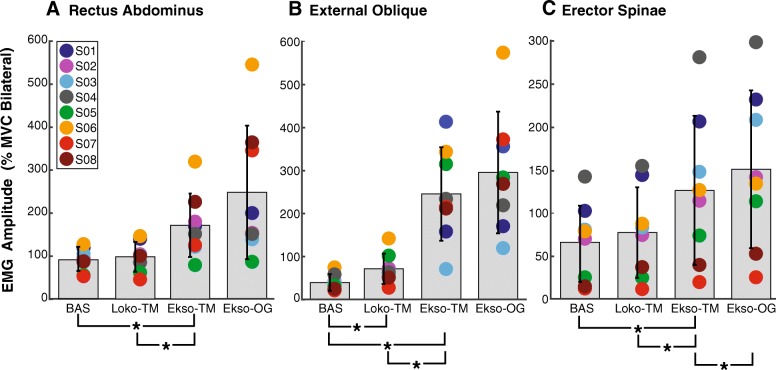
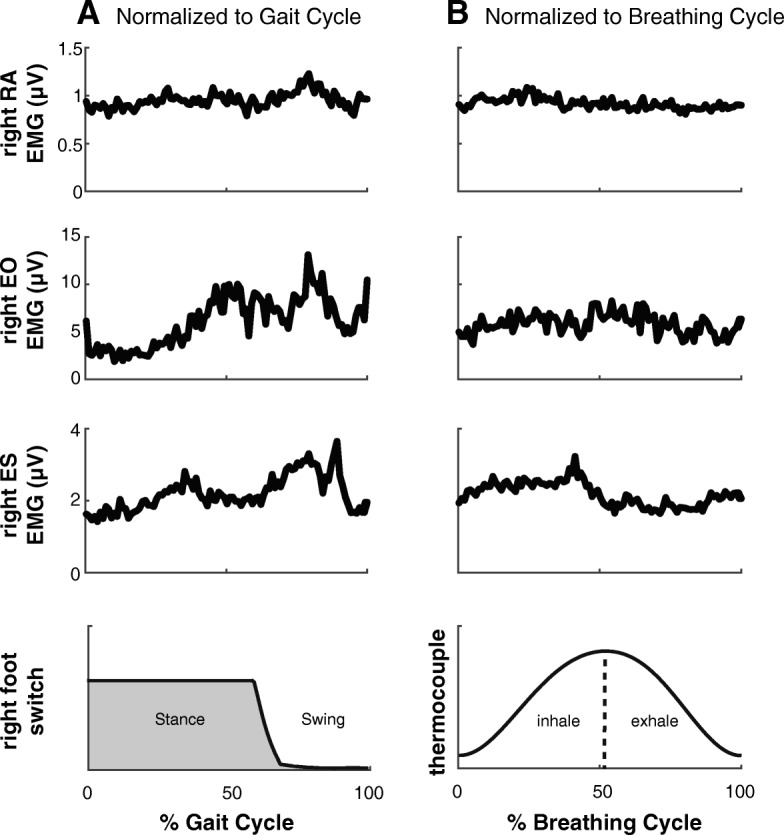
Methods: Participants with chronic motor-complete paraplegia performed 3 speed-matched walking conditions: Lokomat-assisted walking, Ekso-assisted walking overground, and Ekso-assisted walking on a treadmill. Surface electromyography (EMG) signals were recorded bilaterally from the rectus abdominis (RA), external oblique (EO), and erector spinae (ES) muscles.
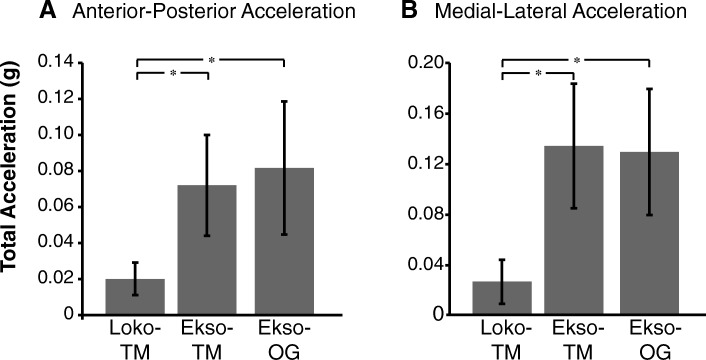
Results: Greater recruitment of trunk muscle EMG was elicited with Ekso-assisted walking compared to the Lokomat. Similar levels of trunk EMG activation were observed between Ekso overground and Ekso on the treadmill, indicating that differences between Ekso and Lokomat could not be attributed to the use of a hand-held gait aid. The level of trunk EMG activation during Lokomat walking was not different than that recorded during quiescent supine lying.
Conclusions: Ekso-assisted walking elicits greater activation of trunk muscles compared to Lokomat-assisted walking, even after controlling for the use of hand-held assistive devices. The requirement of the Ekso for lateral weight-shifting in order to activate each step could lead to better postural muscle activation.
Keywords: EMG; Exoskeletons; Spinal cord injury; Trunk muscles.
Conflict of interest statement
Ethics approval and consent to participate
All participants provided written informed consent and all procedures were approved by the UBC Clinical Research Ethics Board.
Consent for publication
All participants provided written informed consent to publish the data.
Competing interests
The authors declare that they have no competing interests.
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Figures
References
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Medical
Molecular Biology Databases
