

Quantifying the relative importance of experimental data points in parameter estimation
- PMID: 30463558
- PMCID: PMC6249737
- DOI: 10.1186/s12918-018-0622-6
Quantifying the relative importance of experimental data points in parameter estimation
Abstract
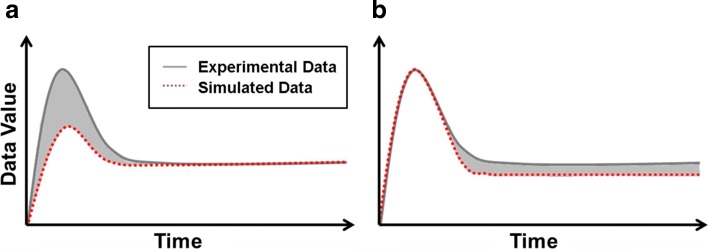
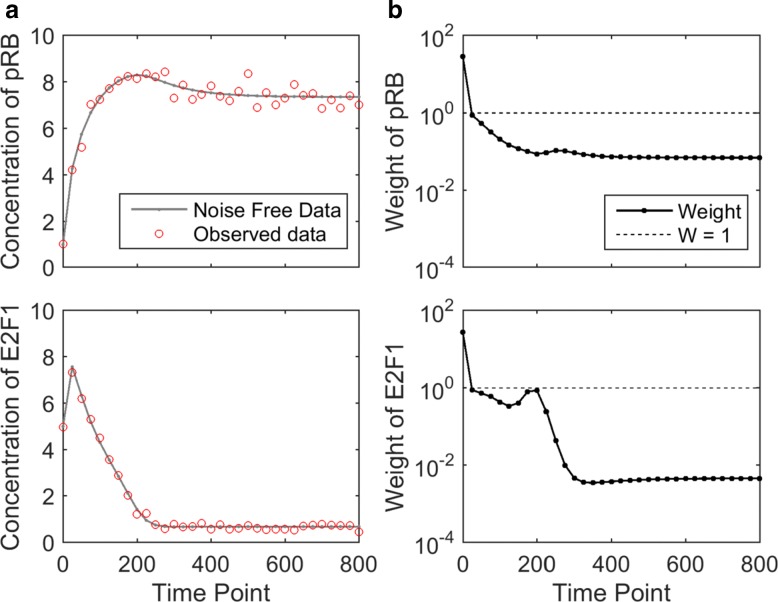
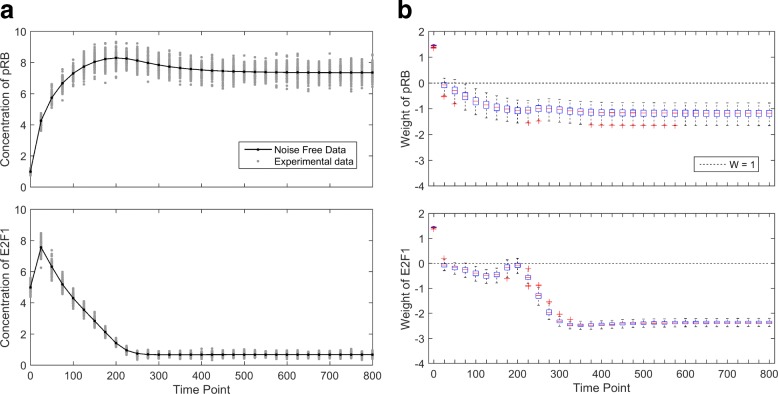
Background: Ordinary differential equations (ODEs) are often used to understand biological processes. Since ODE-based models usually contain many unknown parameters, parameter estimation is an important step toward deeper understanding of the process. Parameter estimation is often formulated as a least squares optimization problem, where all experimental data points are considered as equally important. However, this equal-weight formulation ignores the possibility of existence of relative importance among different data points, and may lead to misleading parameter estimation results. Therefore, we propose to introduce weights to account for the relative importance of different data points when formulating the least squares optimization problem. Each weight is defined by the uncertainty of one data point given the other data points. If one data point can be accurately inferred given the other data, the uncertainty of this data point is low and the importance of this data point is low. Whereas, if inferring one data point from the other data is almost impossible, it contains a huge uncertainty and carries more information for estimating parameters.
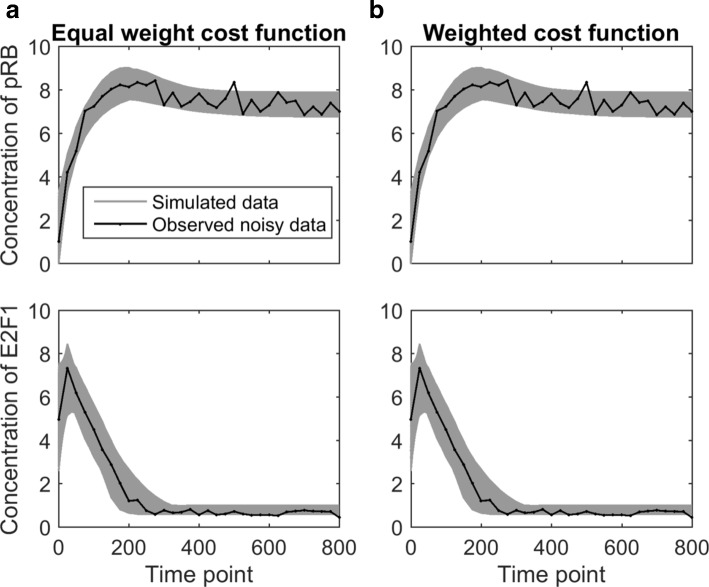
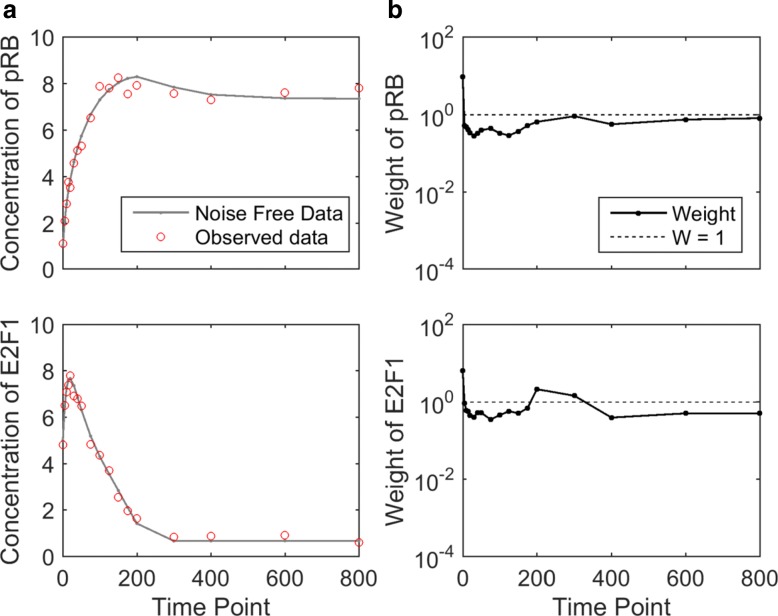
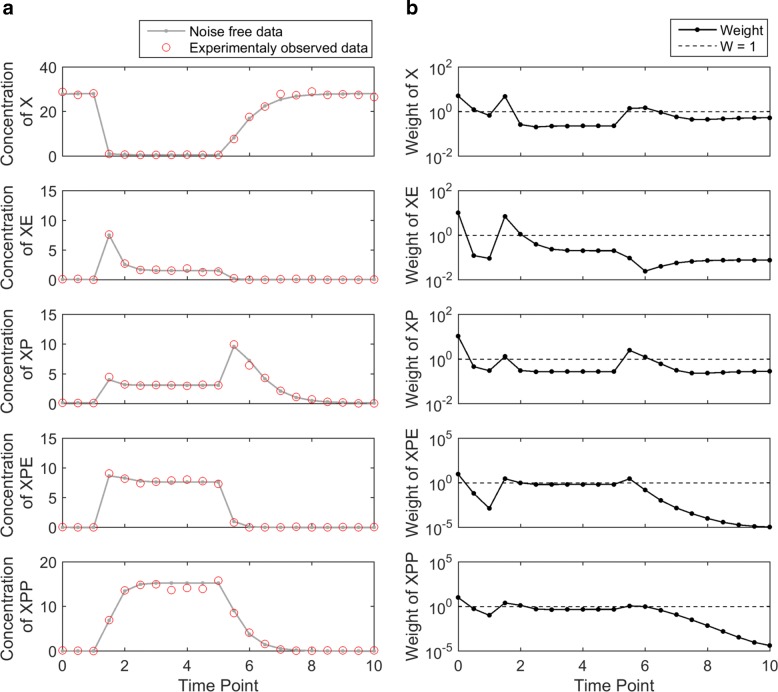
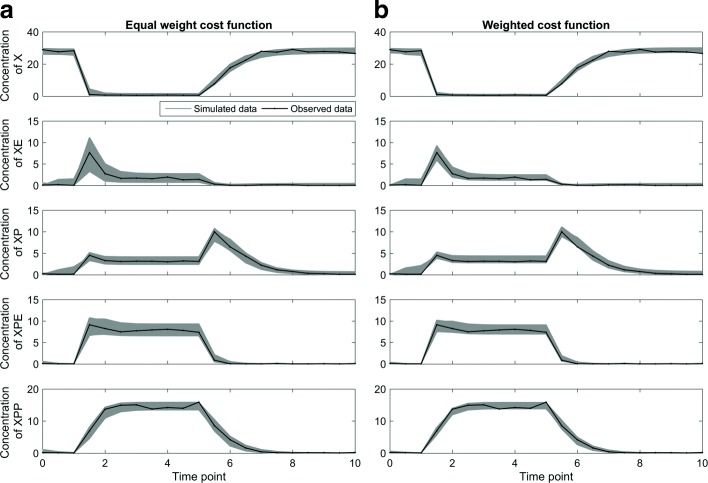
Results: G1/S transition model with 6 parameters and 12 parameters, and MAPK module with 14 parameters were used to test the weighted formulation. In each case, evenly spaced experimental data points were used. Weights calculated in these models showed similar patterns: high weights for data points in dynamic regions and low weights for data points in flat regions. We developed a sampling algorithm to evaluate the weighted formulation, and demonstrated that the weighted formulation reduced the redundancy in the data. For G1/S transition model with 12 parameters, we examined unevenly spaced experimental data points, strategically sampled to have more measurement points where the weights were relatively high, and fewer measurement points where the weights were relatively low. This analysis showed that the proposed weights can be used for designing measurement time points.
Conclusions: Giving a different weight to each data point according to its relative importance compared to other data points is an effective method for improving robustness of parameter estimation by reducing the redundancy in the experimental data.
Keywords: Ordinary differential equation; Parameter estimation; Weighted least squares.
Conflict of interest statement
Ethics approval and consent to participate
Not applicable.
Consent for publication
Not applicable.
Competing interests
The authors declare that they have no competing interests.
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Figures


References
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
